- @2500_94318063
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
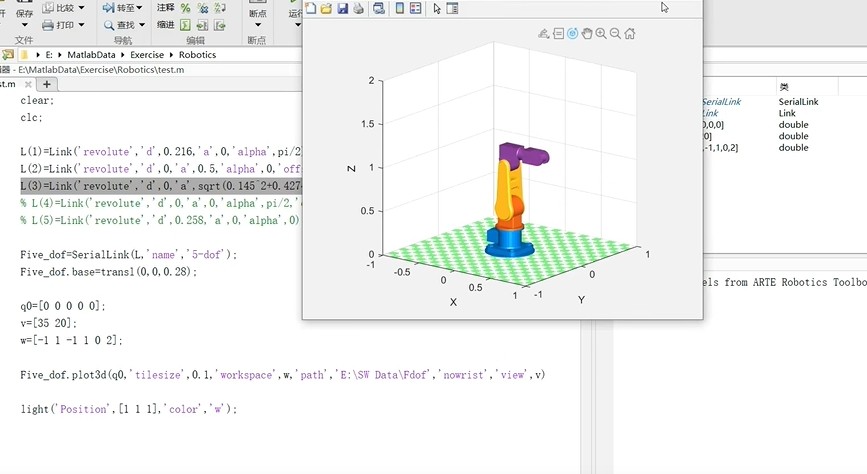
八成是没开动力学模式。在V-REP的机械臂关节属性里勾选"Enable dynamic simulation",然后调调摩擦系数,立马让疯跑的机械臂老实下来。记住:搞机器人仿真,既要会写代码,也要懂怎么"哄"物理引擎。打开V-REP的场景编辑器,拖拽UR5机械臂模型到工作区,突然发现这铁疙瘩的爪子死活夹不住红色方块——这场景是不是很熟悉?别急着摔键盘,咱们今天来点硬核操作,让MATLAB和V-RE
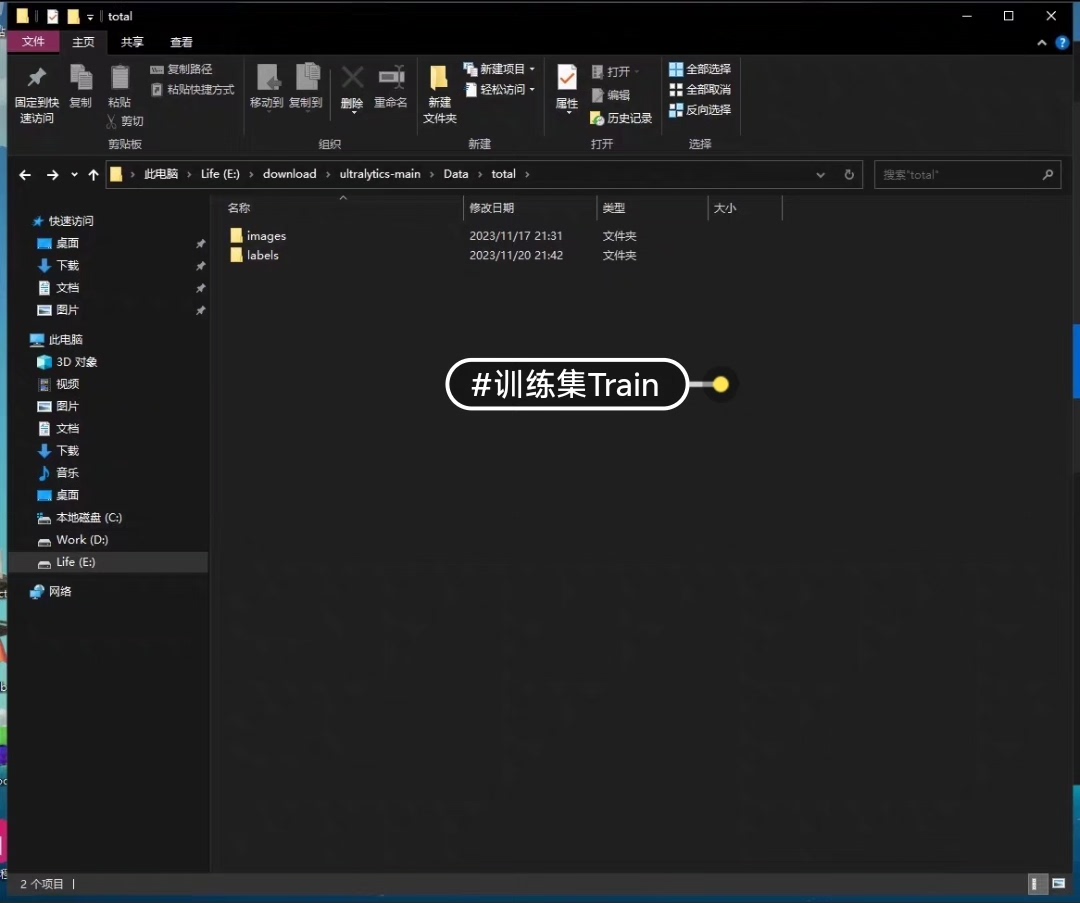
道路病害检测数据集 包含rdd一共 5w3 张包含:横向裂缝 0、纵向裂缝 1、块状裂缝 2、龟裂 3 、坑槽 4、修补网状裂缝 5、修补裂缝 6、修补坑槽 7数据集已划分为训练集/验证集相关YOLOv5/YOLOv6/YOLOv7/YOLOv8模型可直接使用的Yolov8map值 0.751920*1080最近在研究道路病害检测相关项目,今天就来和大家分享一下用到的数据集以及适配的YOLO系列模
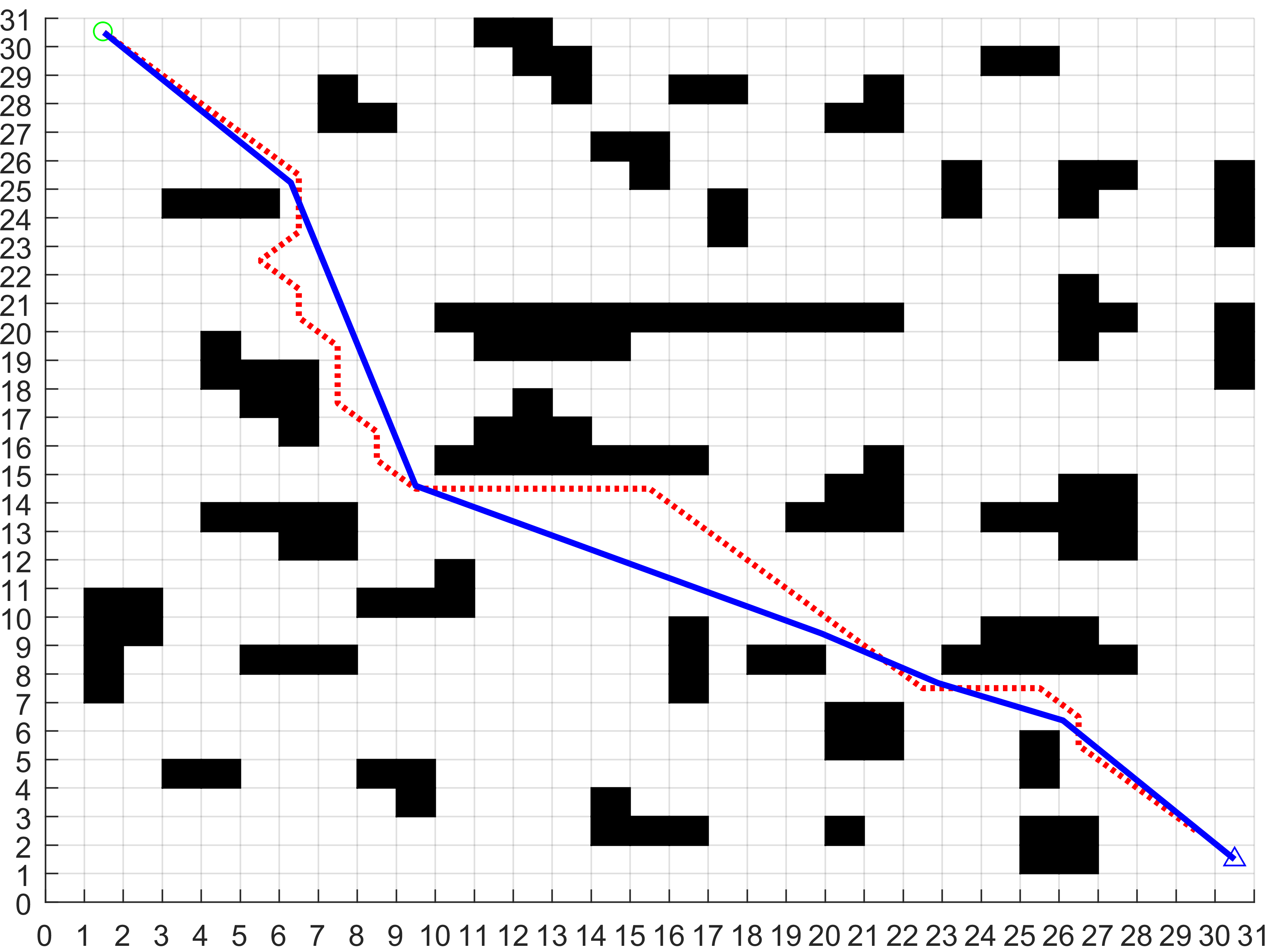
障碍通过后,速度快速恢复,整个过程加速度曲线平滑,没有出现突变——这对实际电机控制非常重要。看对比图(假装有图),传统路径(红色)几乎擦着障碍物走,改进后的(蓝色)明显保持安全距离。DWA迅速计算新速度,配合A*的全局信息,生成一个C形绕行轨迹,同时保持与静态障碍物的安全距离。改进A*算法做全局路径规划,融合动态窗口算法DWA做局部路径规划既可规避动态障碍物,又可与障碍物保持一定距离。改进A*算法
控制系统的数学建模,被控对象的数学模型建立,simulink模型实现。提供四旋翼和带尾翼直升机,共轴式直升机的数学模型、simulink模型,推导。提供资料,文献。刚体飞行动力学模型,运动学模型,旋翼挥舞运动模型。三维坐标变换,旋转矩阵推导,空气动力学。在航空航天领域以及各类自动控制系统中,数学建模是理解和设计控制系统的关键步骤。今天咱们就深入探讨下几种典型飞行器——四旋翼、带尾翼直升机和共轴式直
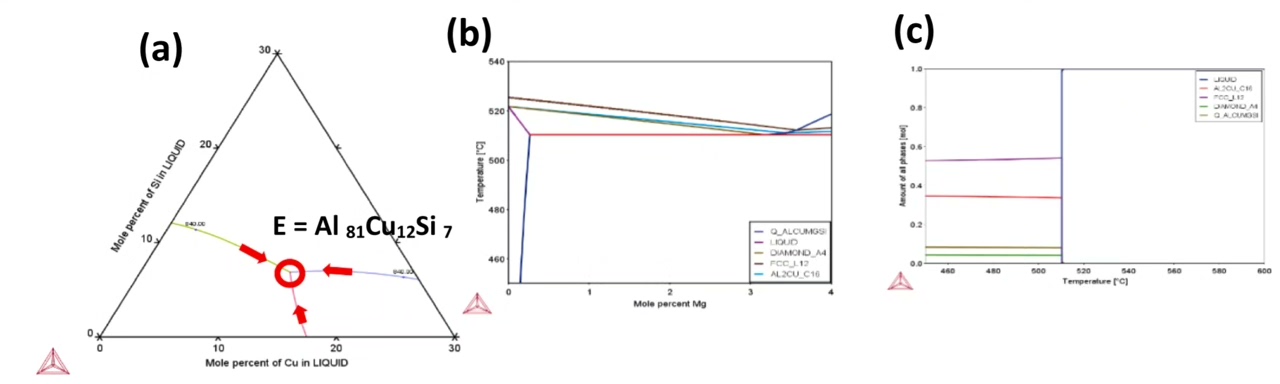
比如我们注意到当Al含量超过82%时,初生相会从θ-Al2Cu转变为Si晶体,这解释了为什么实际合金要把Al控制在81%左右——再高就容易出现硬脆的Si相影响性能。Al的区间给到75-85wt%,Cu给10-15wt%,Si通过差值自动计算。咱们的计算结果显示在Al-82.3Cu-12.1Si附近出现635℃的低温平台,和文献的Al81Cu13Si6(实测熔点630℃)相差约1.3%成分偏差。今天
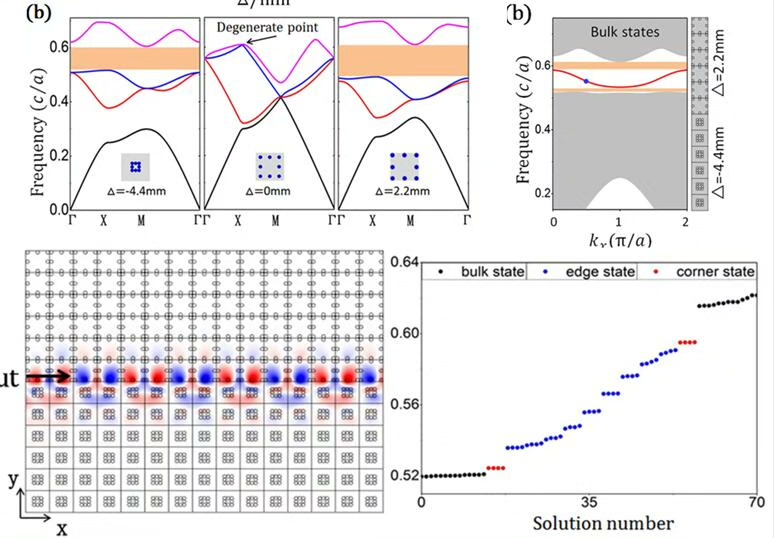
计算完单胞能带后,重点检查Γ点附近的简并态——这玩意儿就是后续拓扑操作的种子。搞光子晶体的都知道,这种角态对微纳传感特别有用——光场被锁在拐角处时,周围介质折射率的微小变化会导致共振峰剧烈偏移。今天咱们用COMSOL实战演练从单胞到超胞的拓扑演变,手把手带你看边界态如何拐个弯就变成角态。最后用参数扫描批量跑不同转角的数据,对比能带折叠情况,整套拓扑演化链条就完整了。超胞能带计算会蹦出新的边缘态,但
八成是没开动力学模式。在V-REP的机械臂关节属性里勾选"Enable dynamic simulation",然后调调摩擦系数,立马让疯跑的机械臂老实下来。记住:搞机器人仿真,既要会写代码,也要懂怎么"哄"物理引擎。打开V-REP的场景编辑器,拖拽UR5机械臂模型到工作区,突然发现这铁疙瘩的爪子死活夹不住红色方块——这场景是不是很熟悉?别急着摔键盘,咱们今天来点硬核操作,让MATLAB和V-RE
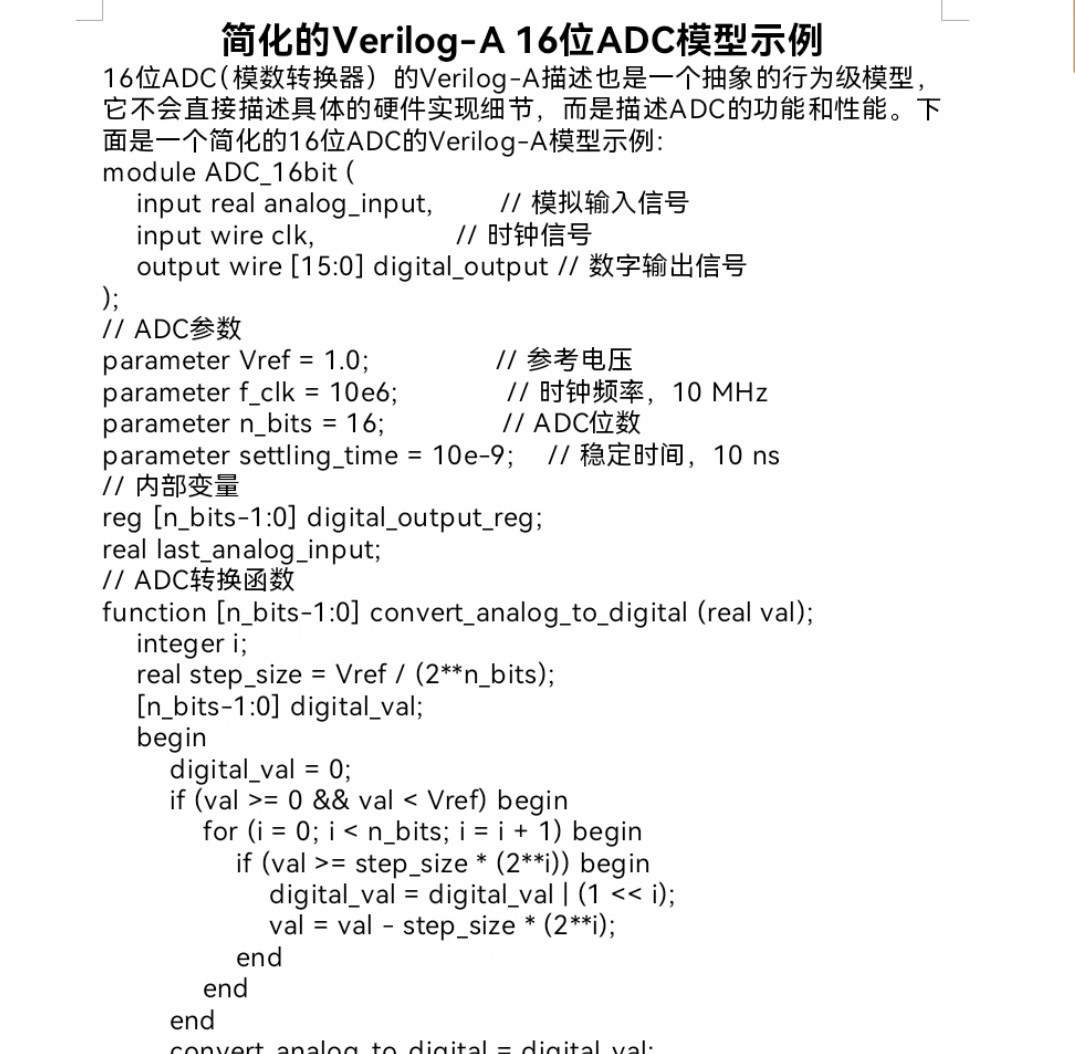
电容阵列用transition函数建模,把16位数字量转成模拟电压,1ns的上升时间避免仿真出现不连续点。芯片设计里的行为模型验证就像给电路做沙盘推演,最近在折腾16位SAR ADC的建模时发现,VerilogA真是个快速验证架构的神器。不过行为模型也不是万能的,像电荷注入效应这种与物理实现强相关的现象,还是得靠后仿验证。比如最初没加时钟分频模块,仿真发现比较器在采样阶段误触发,导致输出码跳变——
DQN算法Q-learning算法让红色方格自己寻找最便捷的路径避开障碍物到达黄色圆圈,非常的智能视频里是DQN的训练过程,全程只需要3分钟Q-learning需要训练半小时在强化学习的世界里,Q - learning和DQN算法就像两颗璀璨的明星,各自闪耀着独特的光芒。今天咱们就通过一个有趣的例子,看看它们如何各显神通。想象有一个场景,红色方格要在布满障碍物的环境中,找到一条最便捷的路径,最终抵
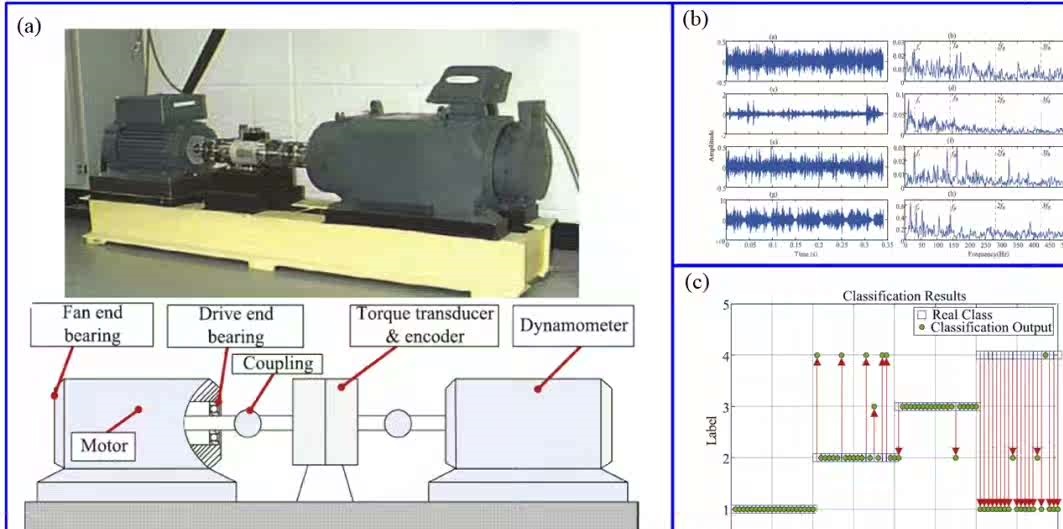
基于双路神经网络,融合原始振动信号和二维时频图像的故障诊断方法,在理论和实践上都展现出一定优势。通过选择合适的时频图像算法和搭建有效的神经网络模型,有望在滚动轴承故障诊断中取得更好的效果。后续还可以进一步探索不同数据集、不同时频图像算法对诊断精度的影响,不断优化模型性能。基于双路神经网络的滚动轴承故障诊断融合了原始振动信号和二维信号时频图像的多输入(多通道)故障诊断方法单路和双路都可时频图像算法可