- @CsNBjQxJBPWp
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
重点来了,系统时间必须和密钥有效期匹配,我上次就栽在这儿,机器时间调回2018年才读出来,你懂的。搞过工业机器人的兄弟应该都懂,ABB的选项包就跟游戏里的DLC似的,没解锁的话高级功能全灰。今天咱们唠点硬核的,手把手教你三种激活大法——物理密钥、虚拟机巧、还有直接写密钥的骚操作。ABB机器人选项包,密钥,三种方法,真实、虚拟、密钥三种方法,有教程、有软件、也有密钥。ABB机器人选项包,密钥,三种方
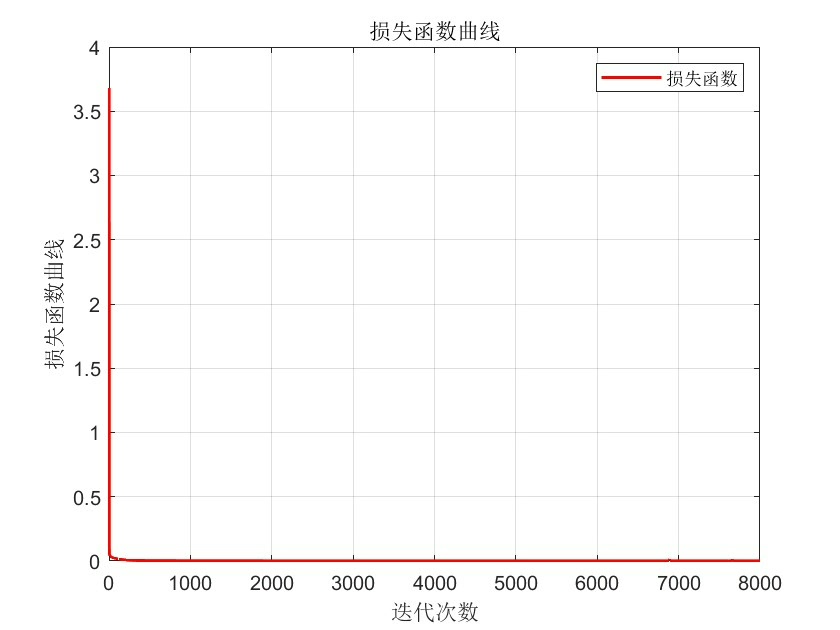
BP神经网络是一种按误差反向传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。它的基本结构包括输入层、隐藏层和输出层。在训练过程中,通过不断调整神经元之间的权重,使得预测值与真实值之间的误差最小化。
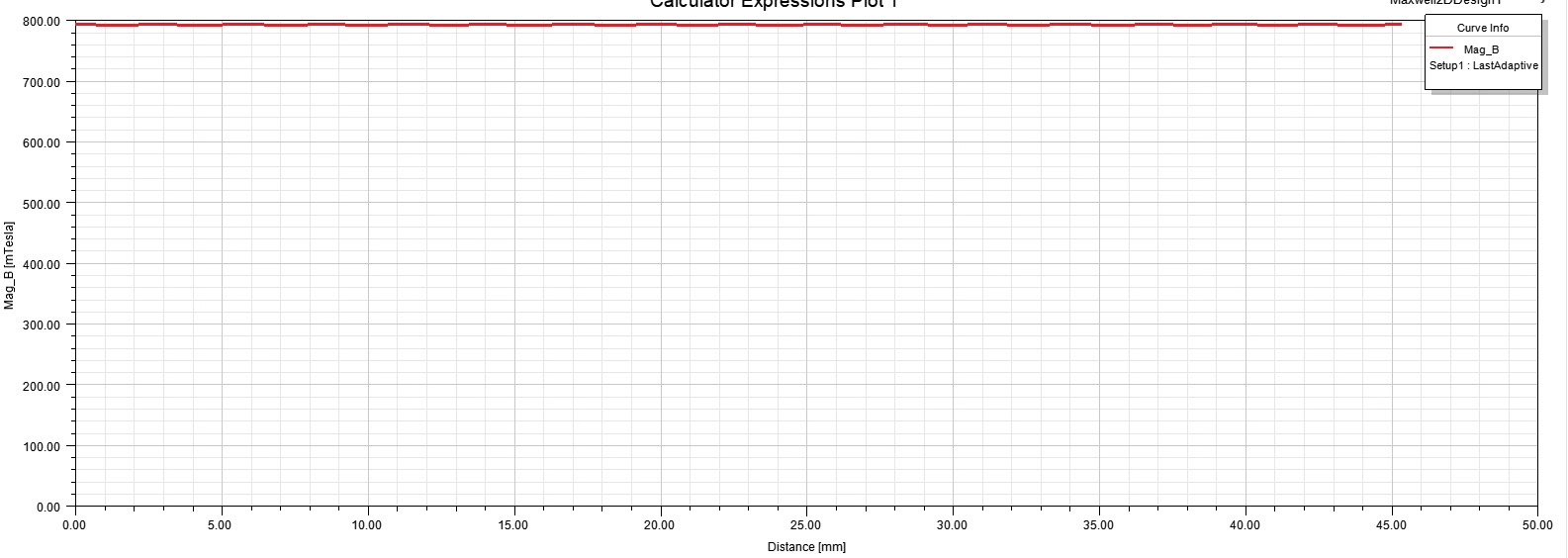
Maxwell电磁有限元仿真为我们构建环形halbach磁体阵列、打造匀强匀梯度静磁场提供了强大的工具。通过几何建模、材料设置、边界条件设定以及参数调整等一系列步骤,我们能够在虚拟的数字世界中精准地模拟出复杂的磁场情况,为实际的科研和工程应用提供重要的参考依据。希望各位对电磁学感兴趣的小伙伴,也能亲自在Maxwell的世界里探索一番,挖掘更多磁场的奥秘!
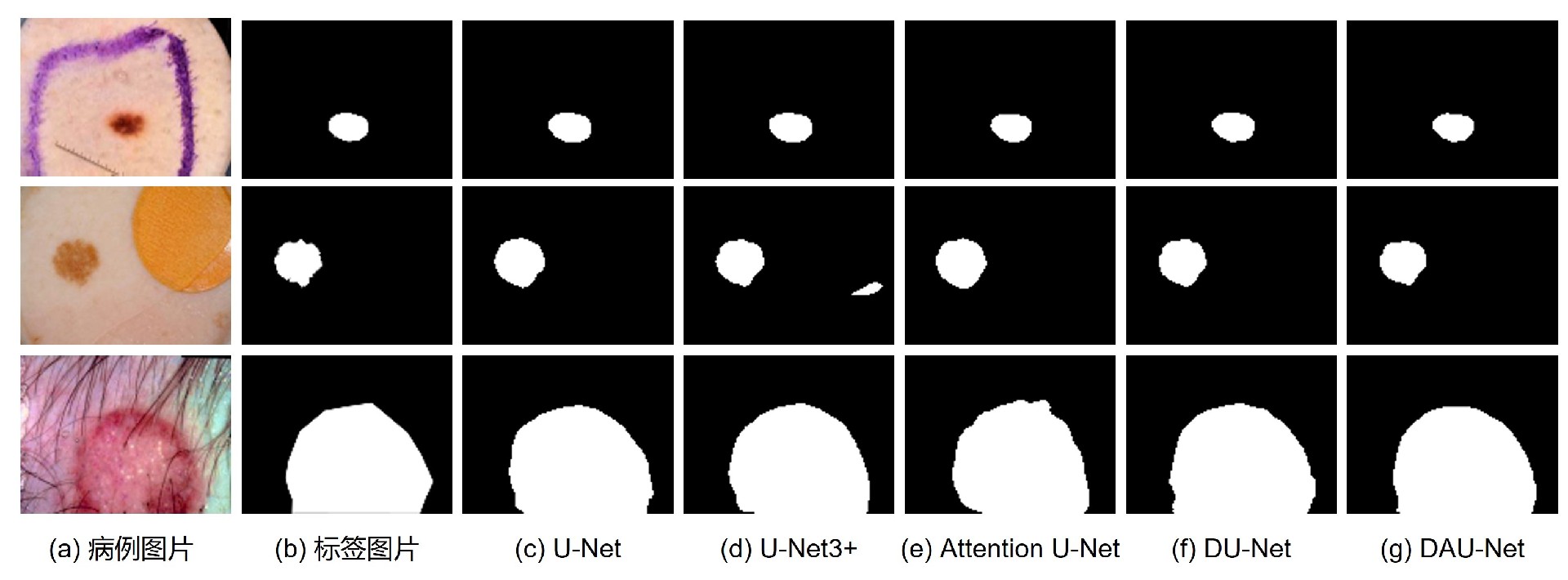
DL00658-自适应医学图像分割模型模型使用可变形卷积自适应提取特征;利用全面的间隔跳跃连接在编码器上搜集特征信息,解码器上残差连接促进特征进行传递利用;残差注意力卷积优化编码器和解码器之间的语义差距,从通道和空间上的注意力抑制无关特征,突出有效特征,自适应促进二者之间的特征传递利用;除了提高精度外,模型还使用多尺度深度监督来进一步增强病灶区域边界分割并减少非病灶区域的过度分割。在医学图像处理领
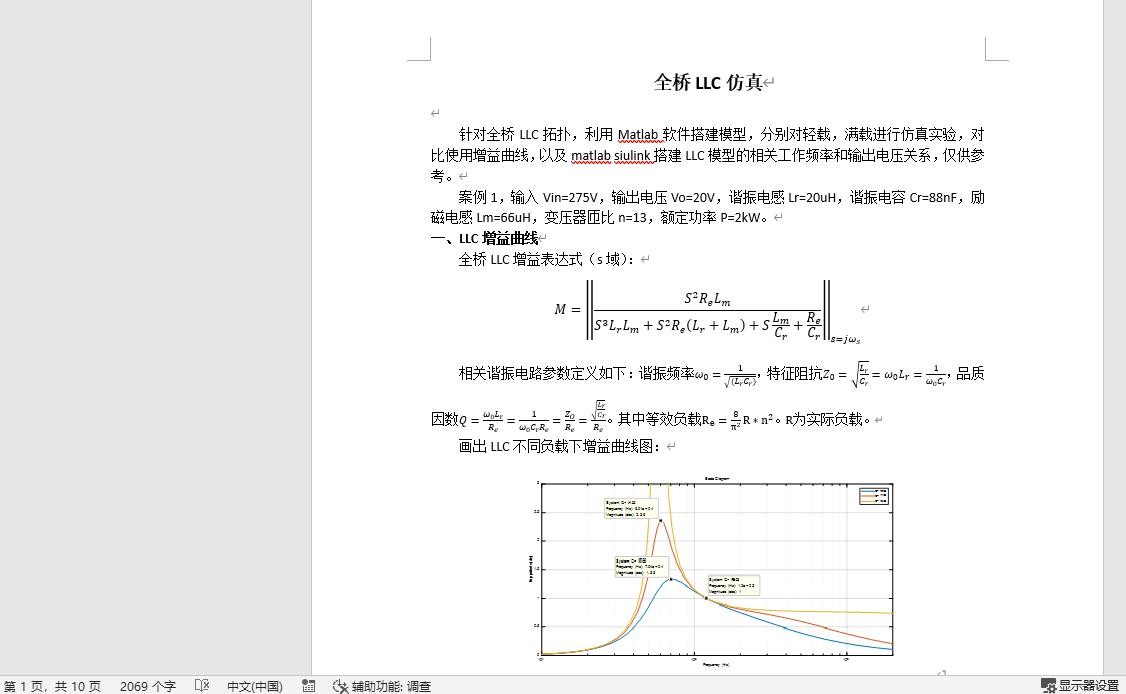
全桥LLC仿真模型(MTALAB/Similink),闭环,设计报告,可供初学者参考。嘿,各位刚踏入电力电子仿真领域的小伙伴们!今天咱来唠唠全桥LLC仿真模型在MATLAB/Simulink里的闭环设计,这可是个很实用的东西,对初学者来说能快速上手理解LLC变换器的原理和控制策略。
实测环节才是见证奇迹的时刻。最后,图3.3右下角的图表反映了训练集中目标高宽比例的分布状况,了解人脸目标的高宽比例分布对于模型的准确性至关重要,因为不同角度和姿态的人脸可能会导致不同的高宽比。最后,图3.3右下角的图表反映了训练集中目标高宽比例的分布状况,了解人脸目标的高宽比例分布对于模型的准确性至关重要,因为不同角度和姿态的人脸可能会导致不同的高宽比。图3.3左下角的图表描述了边界框中心点在图像
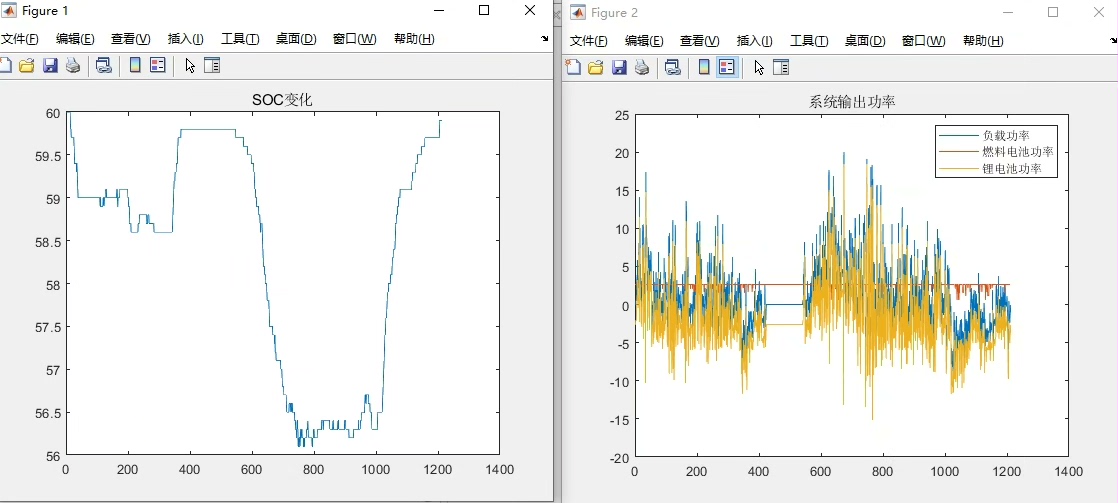
本MATLAB程序实现了一个基于庞特里亚金极小值原理(PMP)的燃料电池-锂电池混合动力系统能量管理策略。程序通过优化算法在满足负载需求的同时,最小化系统运行总成本。
西门子PLC的升降横移立体停车库的设计,设计一个基于西门子S7-200 PLC控制核心的,三层三列,九个车位的立体停车控制系统。目录\\t31绪 论\\t42设计要求\\t53硬件设计\\t83.1 PLC型号的选择和确定\\t83.2 主电路设计\\t83.3 控制电路图\\t113.4 PLC输入和输出地址分配表\\t133.5 PLC接线图\\t144程序设计\\t174.1PLC 内部使用
永磁同步电机高性能无感foc源码无刷直流电机驱动方案无刷直流电机无感foc控制闭环启动1%额定频率均匀运行2%额定频率下带满载100%负载启动Ok磁链法位置估计代码全部C语言源码送仿真模型12K载频下实测1k电频率输出速度环下堵转观测器不发散可以提供方案验证配套硬件在电机控制领域,永磁同步电机(PMSM)和无刷直流电机(BLDC)的高性能控制一直是热门话题。
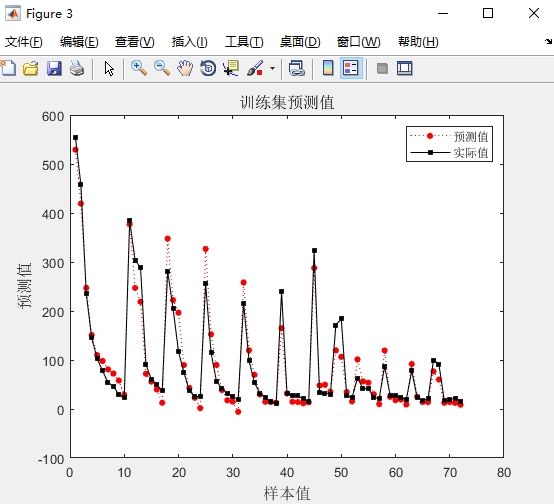
基于粒子群算法优化BP神经网络(PSO-BP)的多变量输入单输出回归预测模型,matlab代码实现在机器学习和预测领域,BP神经网络(Back - Propagation Neural Network)是一种广泛应用的模型,但它容易陷入局部最优解。粒子群算法(Particle Swarm Optimization, PSO)则以其全局搜索能力而闻名。将PSO与BP神经网络相结合(PSO - BP)