- @Q68823886
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
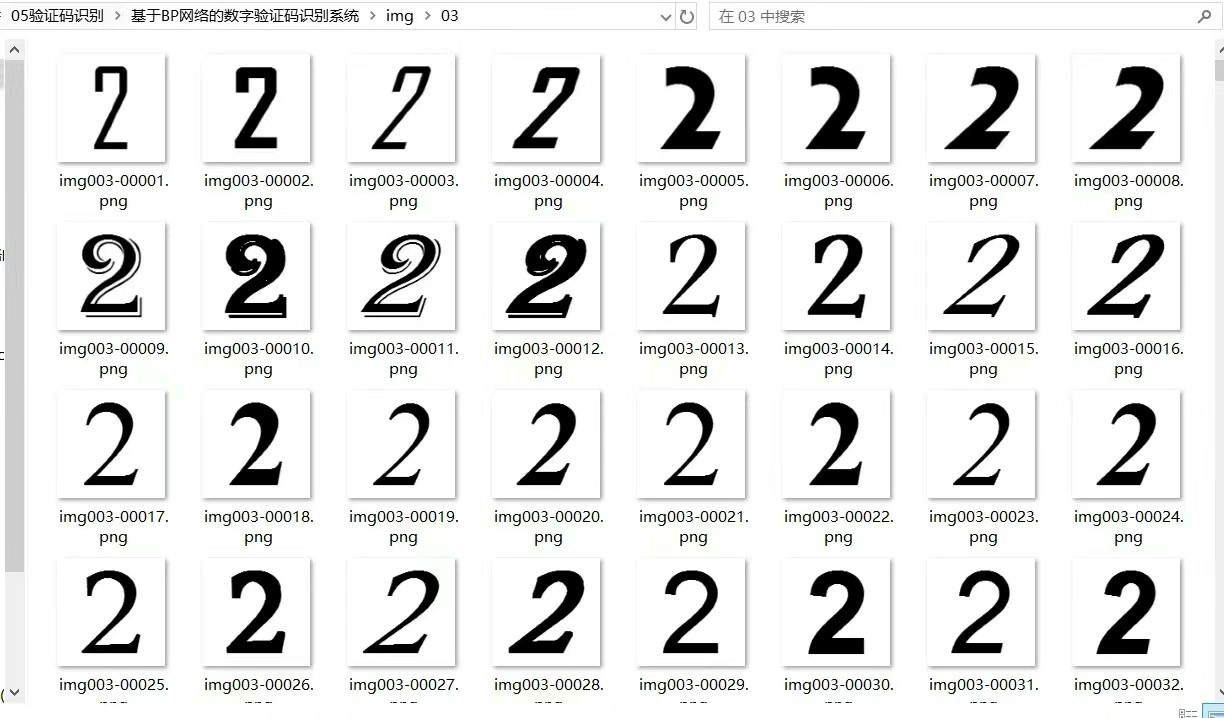
今天咱们用Matlab撸个带GUI界面的BP神经网络识别系统,顺便聊聊那些踩过的坑。下回试试用CNN搞这个,准确率应该能再涨5个点,不过训练时间嘛...你懂的。训练时发现个现象:当训练误差降到0.5%以下,测试误差反而上升,典型的过拟合。实战中发现,数字"5"和"6"容易混淆,解决方法是在样本里增加这两种字的变体。【验证码识别】基于bp网络,基于计算机视觉,matlab代码,含GUI界面。步骤:灰
最后留了个彩蛋——在触摸屏登录界面埋了个马里奥的像素画,输对密码能玩打砖块小游戏,甲方验收时那帮工程师玩得比看设备还起劲...项目收尾时最爽的是看图纸——CAD电气图里连网线颜色都标得明明白白,PROFACE触摸屏的变量直接跟PLC寄存器同名映射。FX5U项目程序,用的三菱FX5U的PLC,里面有CC- LINK通讯机器人.自由口通讯仪表.以太网套接字通讯上位机,脉冲控制3个步进,还有配方。自由口

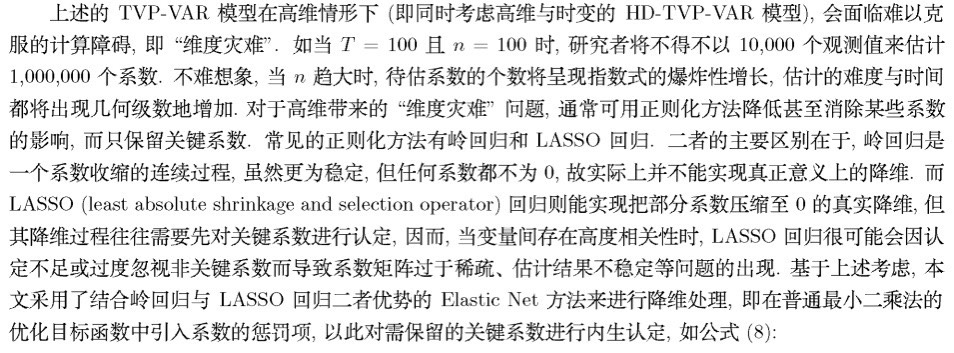
优势:通过Elastic Net方法进行降维处理,能够计算高维数据DY溢出指数,相较于传统TVP-VAR-BK模型只能计算最多20个变量,HD-TVP-VAR-BK可同时估计近百个变量,相较于Lasso BK,Elastic Net BK(弹性网络),HD-TVP-VAR-BK为时变估计,不用损失滚动窗口,且运行速度相对较快。股票市场数据用36期比较稳。R语言代码,有注释和案例数据,能导出静态溢出
我习惯在仿真设置里勾选"Real-Time Sync",这样机械臂动作就跟代码指令完全同步,看着虚拟机械臂跟着代码指令起舞,那感觉贼带劲!最近在倒腾ABB机器人上位机控制的时候发现个好玩的东西——用C#直接操控六轴机械臂的运动轨迹。咱们今天就来个实战演示,全程使用RobotStudio 6.08搭建仿真环境,手把手教你实现机械臂的"隔空操控"。这段代码的核心在于Mastership的获取,相当于抢

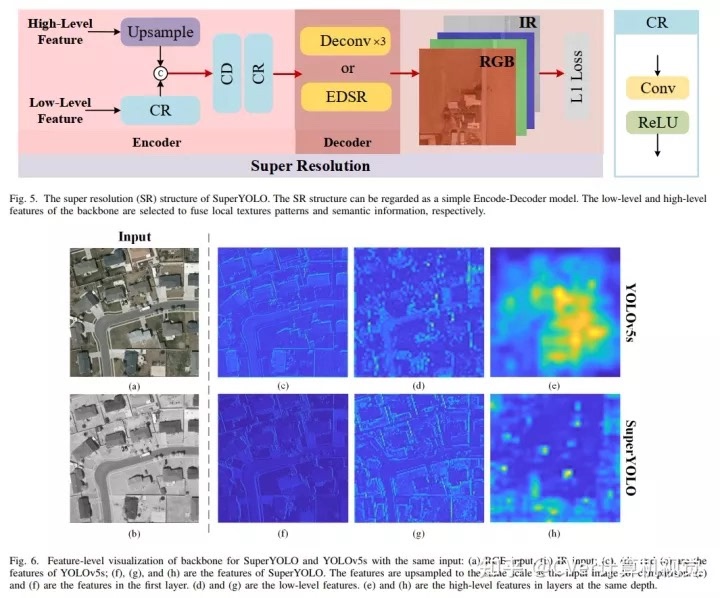
先看它的核心武器——超分辨率检测二合一架构。最后放个精度对比彩蛋:在DOTA遥感数据集上,同样的YOLOv8框架,加入SuperYOLO改进后,mAP从63.1直接飙到71.4。更离谱的是推理速度只增加了3ms,显存占用还降了10%,这波操作属实把平衡性玩明白了。注意PixelShuffle这个骚操作,比普通插值保留了更多纹理细节,对后续检测的头号敌人——小目标特别友好。这里有个细节处理很妙——不
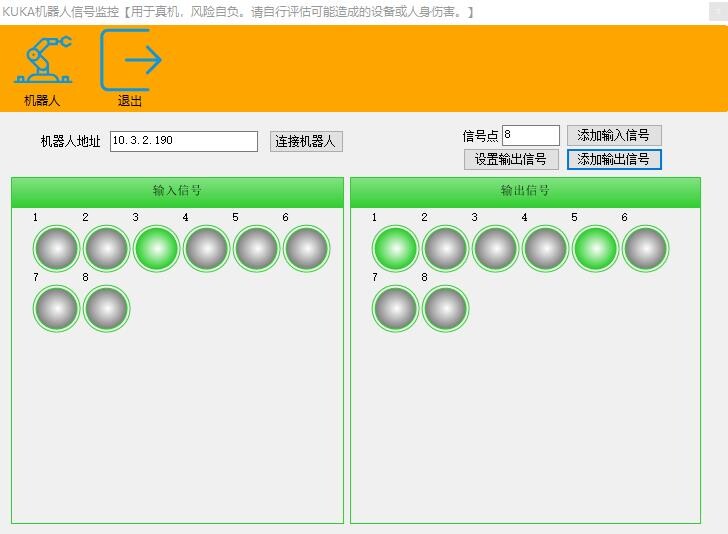
当我把自制的监控工具接入KUKA控制柜时,闪烁的红色信号灯瞬间在屏幕上定位了故障点——这个场景就是我开发C#上位机的初衷。今天要分享的动态控件方案,正是实现灵活监控的关键技术。这段代码的精髓在于事件绑定的匿名委托——当创建数十个信号按钮时,每个按钮都能准确记住自己的信号名称。当机械臂再次故障时,那个自动弹出报警信号的红色面板,就是动态控件技术的最佳实践。通过事件驱动机制,当PLC信号变化时,只需更
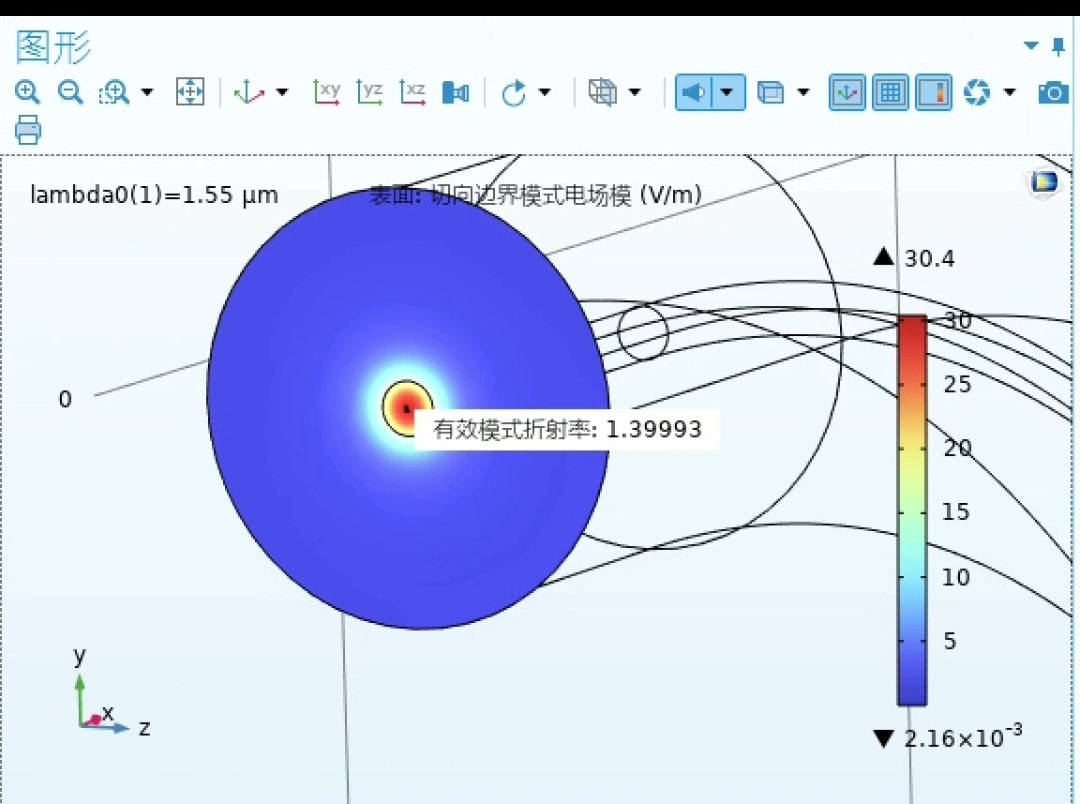
对比波束包络法和FDTD的结果,会发现当弯曲半径小于10倍波长时,两种方法的损耗计算误差可能超过30%。毕竟在光学实验室,会COMSOL的工程师和不会COMSOL的工程师,过的根本是两种人生。但要注意模式失配问题,当弯曲导致的高阶模被激发时,得在端口处添加完美匹配层(PML)吸波,否则反射场会让结果像毕加索的画作一样抽象。有趣的是,当突然把弯曲半径从5mm变到3mm时,原本稳定的高斯模会像被摇晃的
这不仅能够提高安全监控的效率,还能够在关键时刻提供及时的警报,保障人们的安全。接下来,我们需要对这些检测到的人员进行跟踪,以确保我们能够持续监控他们的行为。DeepSORT是一种基于深度学习的多目标跟踪算法,它结合了目标的外观特征和运动信息,能够有效地处理目标遮挡和重新识别的问题。人员异常行为检测 基于深度学习的人员异常行为检测,多目标检测+多目标跟踪实现人员摔倒检测,越线检测,徘徊检测,拥挤检测

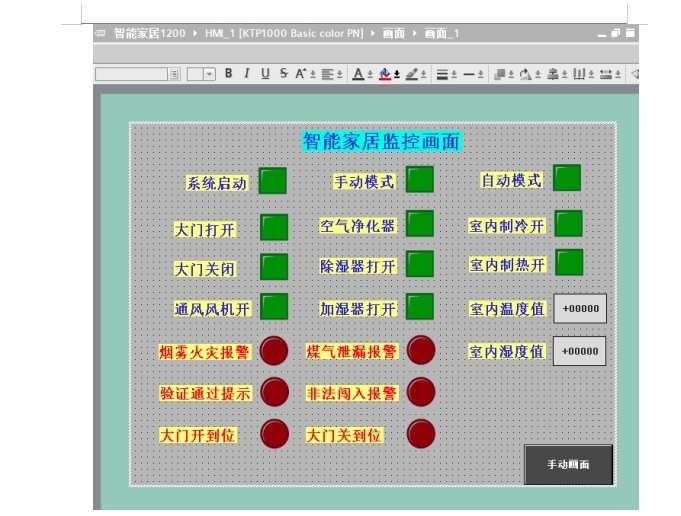
今天唠唠用西门子S7-1200整的智能家居控制系统,重点说仿真这茬——毕竟做毕设的兄弟们在电脑上跑仿真时,没实物按钮得自己造啊。总结就是:组态要准,变量命名别太放飞,仿真按钮记得做互锁。搞定了这些,S7-1200跑智能家居跟玩儿似的,答辩时记得把HMI界面整花哨点,教授就吃这套。最后说个骚操作:用Excel VBA写个OpcUA客户端,直接往仿真PLC灌数据,比手动改变量爽十倍。西门子s7-120
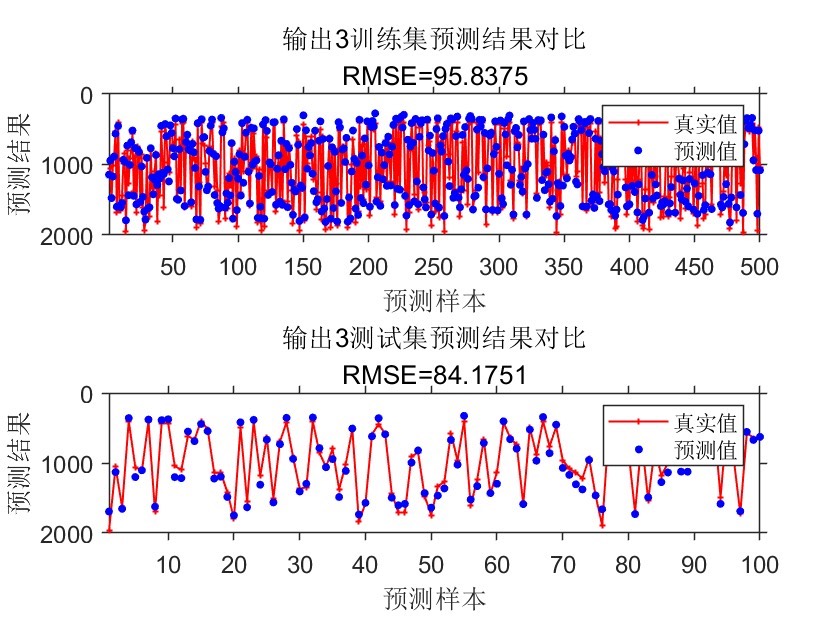
不仅要求精度,还要求可解释、可复现、可迭代。本文介绍的方案用 1 个主脚本即可实现:数据清洗 → 样本构造 → 深度网络训练 → 反归一化还原 → 多指标评估 → 可视化报告,全流程零人工干预,为后续在线部署、超参搜索、AutoML 提供标准化基线。只需“换数据、调超参、再训练”三步,就能在任意多输入多输出场景里快速落地一条高性能、可解释、可扩展的 LSTM 基线。循环内自动拼接 2×1 子图,统