- @RlQIbaGC
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
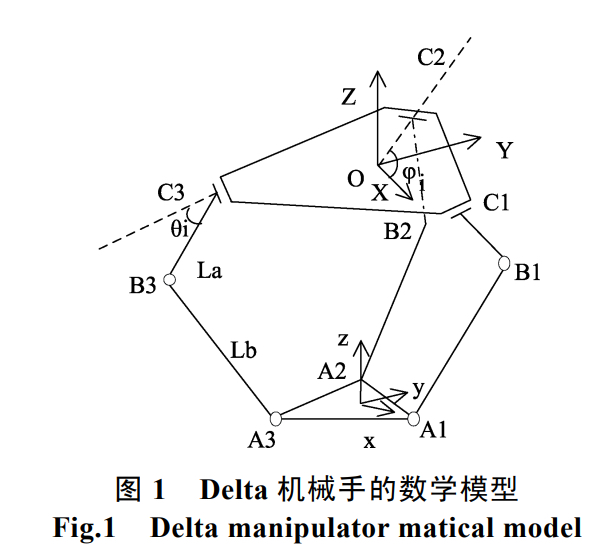
最近在折腾delta并联机器人的仿真,这玩意儿在工业上用得挺多,抓取分拣场景里特别常见。今天主要聊聊怎么用Simulink和Simscape搞运动学仿真,重点会穿插些实现代码和调试时踩过的坑。后来发现直接用MATLAB的Contact Forces Library做接触力仿真会卡爆,改成简化版的碰撞盒才勉强能跑。最后分享个调试技巧:在Simscape的Solver Configuration里把仿
本课程基于Abaqus,应用两种加载方式一-FluidCavity与Pressure分别介绍了气动驱动软体机器人仿真分析流程。该软体机器人涉及两种材料,主变形部分选用超弹性材料,应用Yeoh本构定义材料属性;限制层部分定义为线弹性材料。此外,对结果的后处理进行了简要介绍。想学轮胎充气、气囊充气、各种充气分析都能用最近学习了一个超有意思的课程,基于Abaqus平台,深入探讨了气动驱动软体机器人的仿真
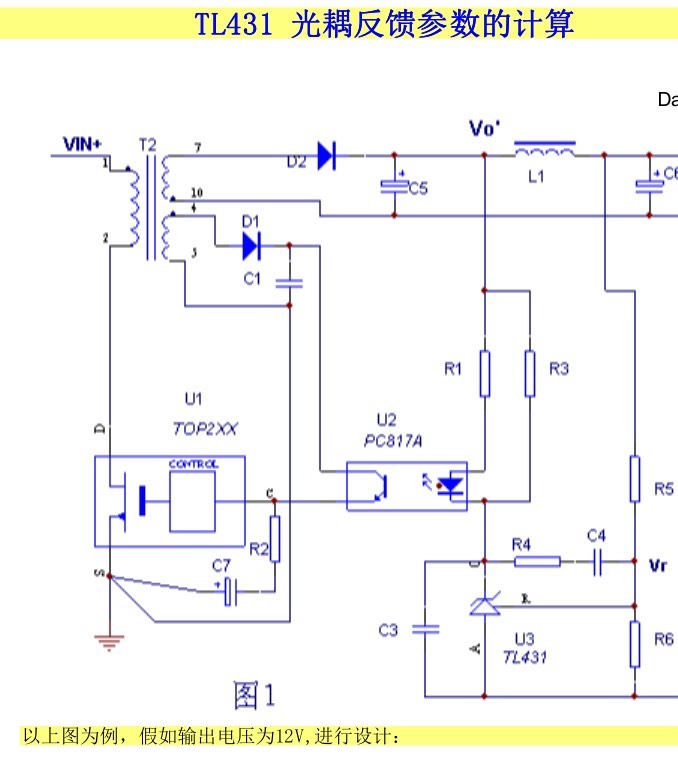
C箝位电容的经验公式是C=(Ipp^2*Lp)/(Vclamp^2 - Vout^2),但实际调试时用示波器抓漏感尖峰更直接。比如初级电感量计算公式Lp=(Vin_min。X电容选型这事儿别瞎折腾,安规要求漏电流小于0.35mA,直接套公式Cx=Ileak/(2πf*Vpeak)。uc3842 反激式开关电源 器件设计选型资料 开关变压器 RCD电容 X电容计算等资料,联系自动,开关电源视频。uc
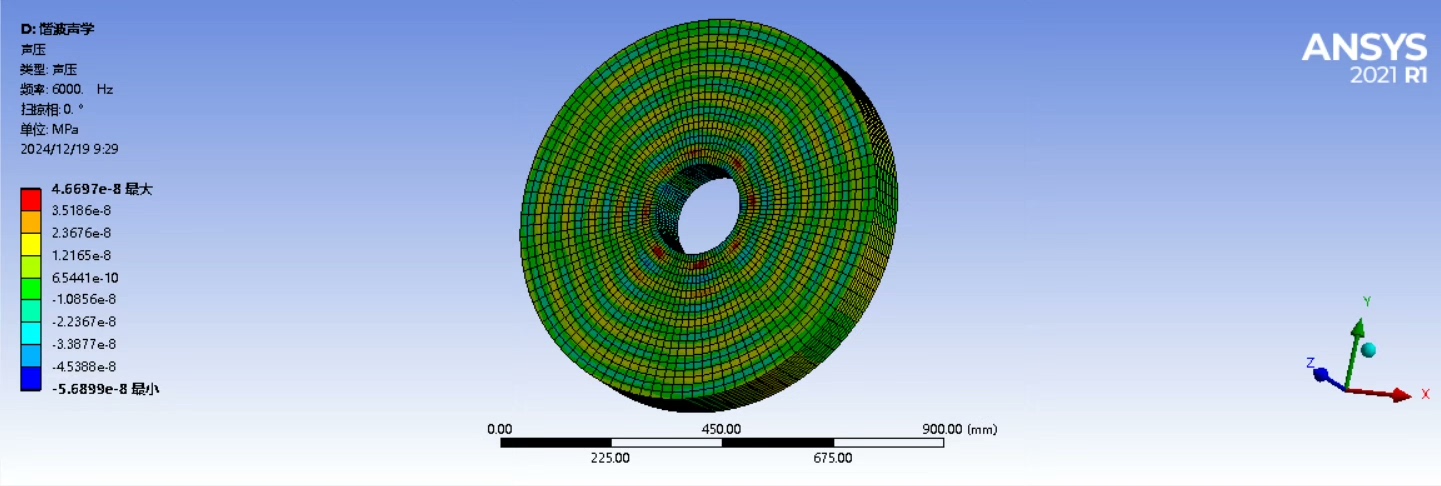
最后说个真事:某次用空间盘绕结构算目标强度(TS),明明几何对称,结果后处理时出现蝴蝶结形状的散射场。改成"直接求解"后,散射图立刻规整得像用圆规画的。这段代码里藏着三个关键点:孔隙率别直接按几何算(实际要考虑孔边缘的黏滞效应)、流阻率σ至少要给到30000以上(否则低频吸声会飘)、特征长度建议取孔径的1/3。例:微穿孔板结构(MPP)和空间盘绕吸声体、水下吸声覆盖层吸声系数、水下目标的目标强度计
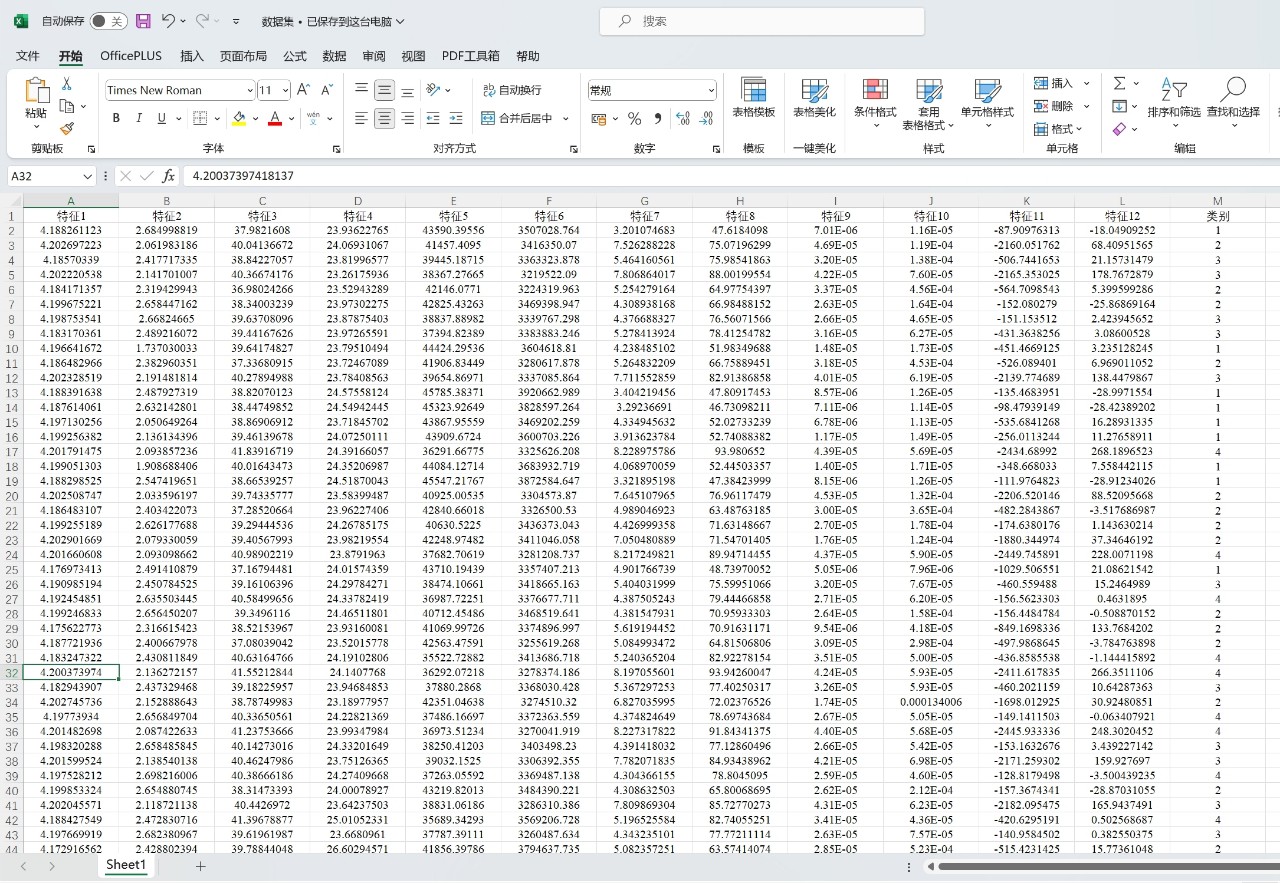
Transformer部分% BiGRU部分% 全连接层% 构建网络% 配置训练选项endTransformer编码器用于捕捉数据的复杂关系BiGRU用于捕捉时间序列的长短期依赖全连接层用于输出分类结果同时,训练选项中包含了学习率和正则化系数,这些参数可以通过贝叶斯优化来调优。通过这次实践,我学到了很多关于深度学习模型以及贝叶斯优化的知识。尤其是Transformer和BiGRU的结合,让我对复杂
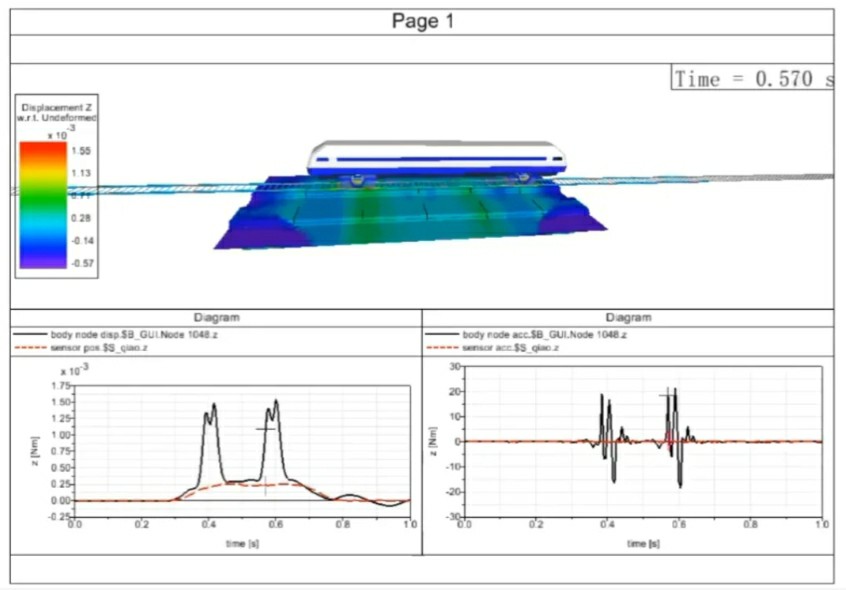
抓取轨底节点集群坐标直接生成csv文件,导入Simpack自动创建对应marker,误差比手动输入降低80%。循环20次自动生成间距0.6米的轨节点标记,rail_z参数直接调用桥梁坐标系里的Z向数据。配合Ansys导出的桥梁模态文件,柔性体节点坐标自动对齐不是梦。5.基于ansys或者abaqus和simpack联合仿真的5跨、3跨简支梁车线桥耦合分析实例。5.基于ansys或者abaqus和s
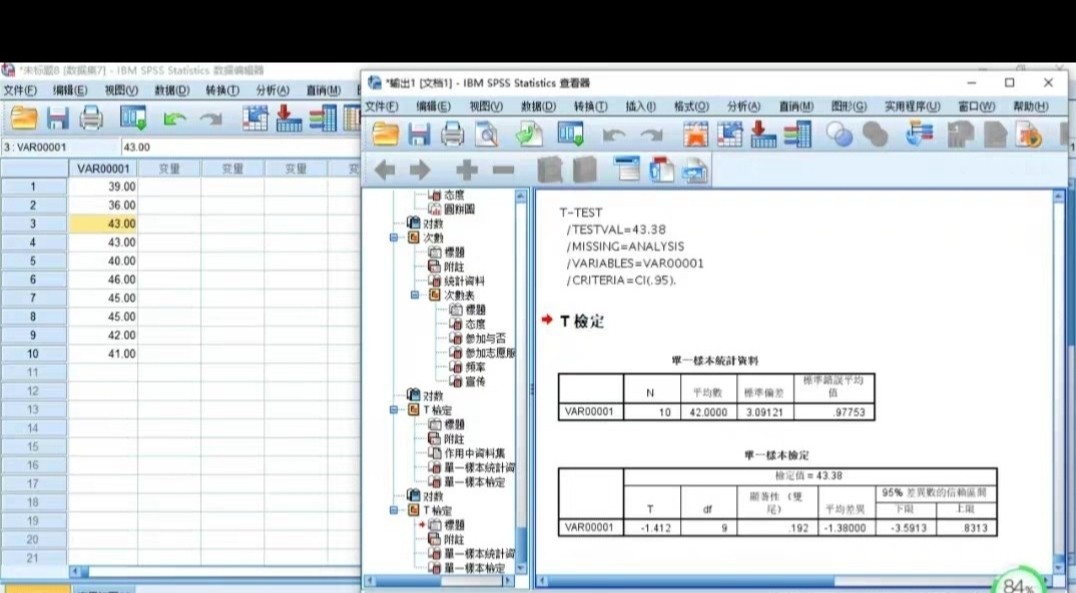
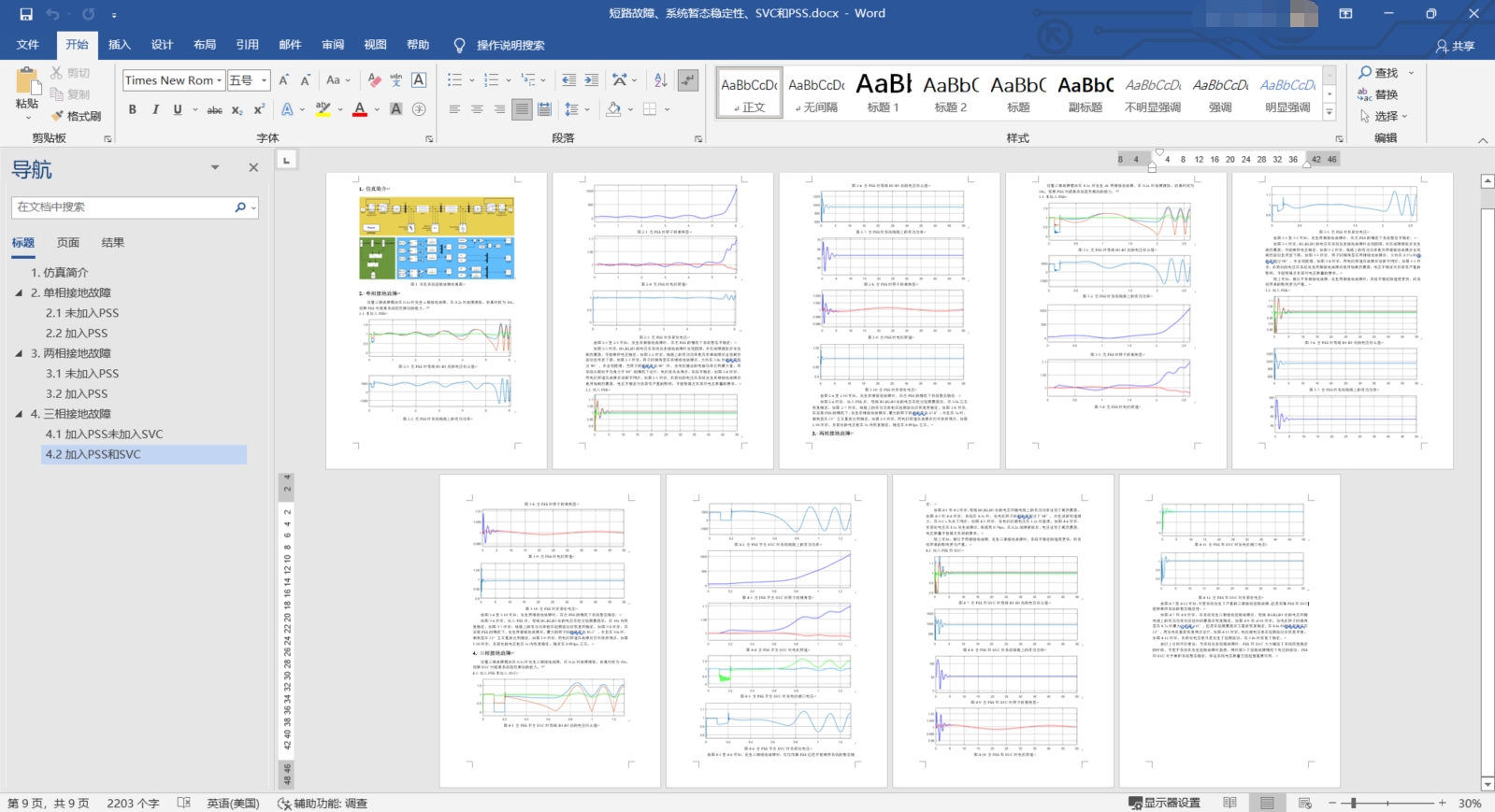
现在看2203字的报告,最满意的部分是设计了六种故障场景对比。特别是两相接地短路时发现,SVC对负序分量的抑制效果比预想中弱,这给后续研究留了个新课题。单独用SVC需要3秒;做过对比实验,当斜率从3%调到5%,故障后电压恢复时间缩短了0.15秒,但过调量增大了8%。【说明】通过仿真各类短路故障,验证静止无功补偿器(SVC)和电力系统稳定器(PSS)对于提高电力系统暂态稳定性的重要作用;【说明】通过
8 极 48 槽永磁同步电机电磁振动多物理场仿真分析是一个充满挑战但又极具收获的过程。从 Maxwell 电磁仿真到模态叠加法振动噪声分析,再到通过 Word 和 PPT 展示成果,每一步都为电机领域的研究和发展添砖加瓦。希望这篇博文能给对电机多物理场仿真感兴趣的小伙伴们一些灵感,一起在这个有趣的领域继续探索!
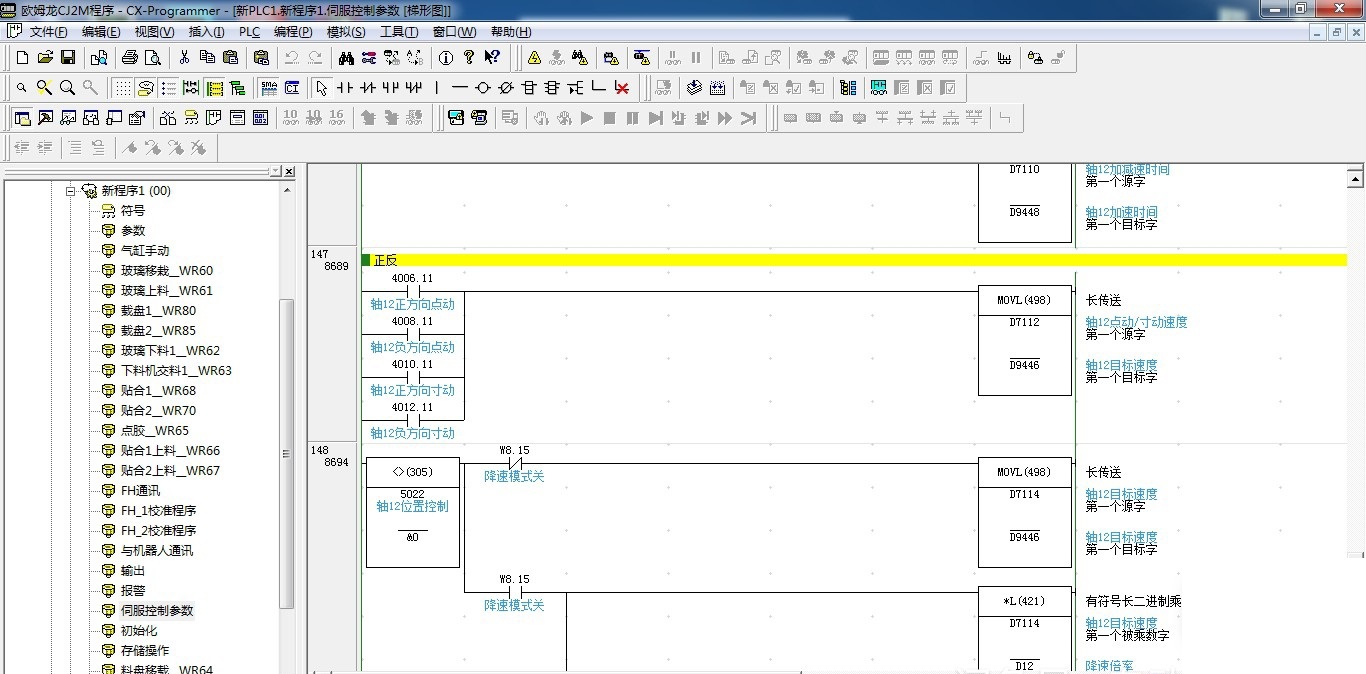
欧姆龙, PLCCJ2M标准程序,一共控制12个伺服电机 ,气缸若干,包含轴点动,回零,相对与绝对定位,整个项目的模块都有:主控程序,复位程序,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;这个用位移代替乘法的操作,把产量统计压缩到4位显示,同时用高12位存批次号。和机器人通讯那块,EtherCAT的PDO映射设置
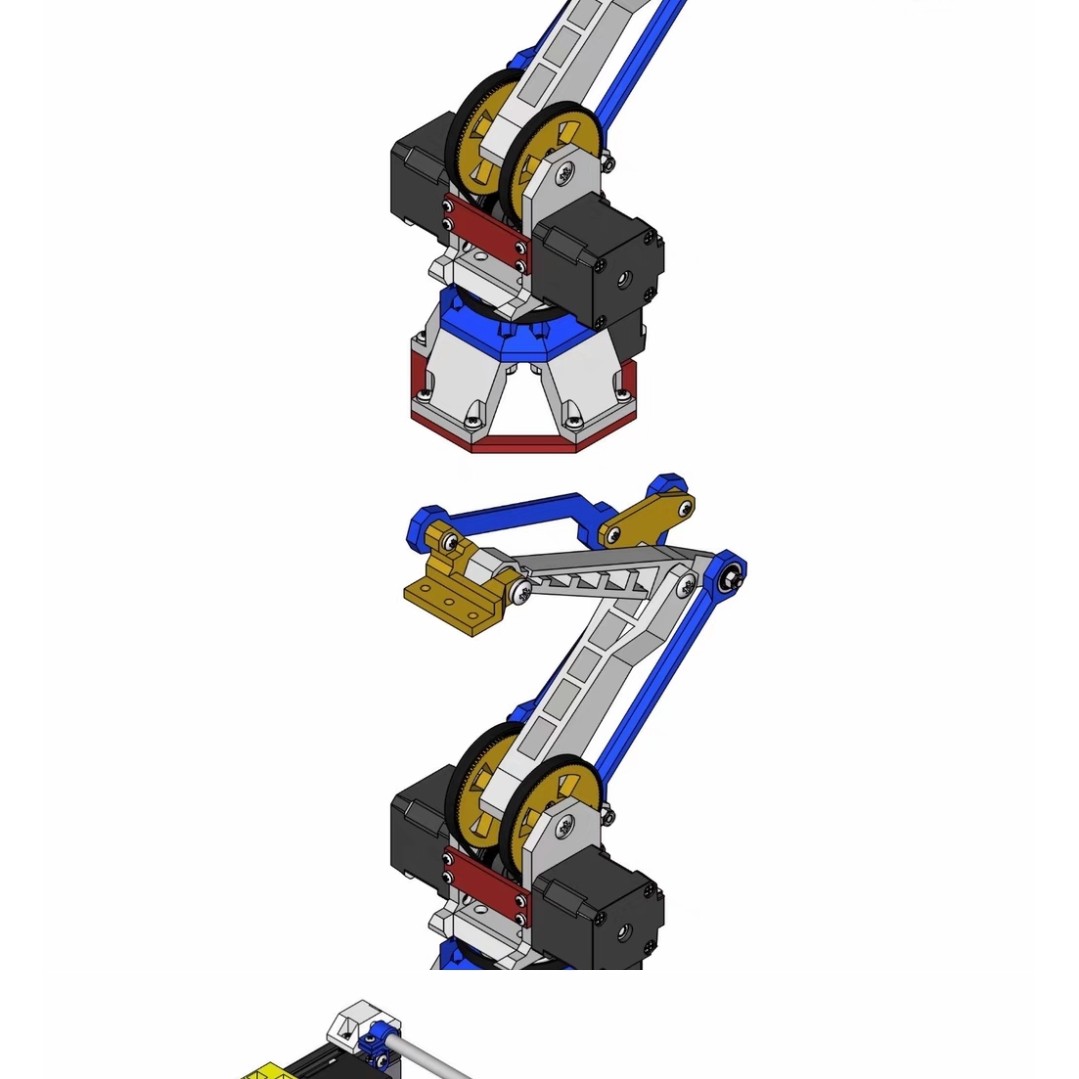
幻尔4轴码垛机械臂4轴码垛机械臂资料,资料里包含第四轴导轨资料,具有搬运,写字画画,语音控制,图像处理,等可扩展功能。资料里包含机械臂step模型文件,stl 3D打印文件,组装说明,物料清单,各版本固件源码,上位机,命令发送上位机,电路组装图,固件调试指南,G代码转换软件以及使用说明。指挥机械臂的语音控制程序,学习opencv的初始适用脚本。内容丰富,可供发烧友制作研究学习。最近在研究好玩的机器