- @jDPvYjdteF
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
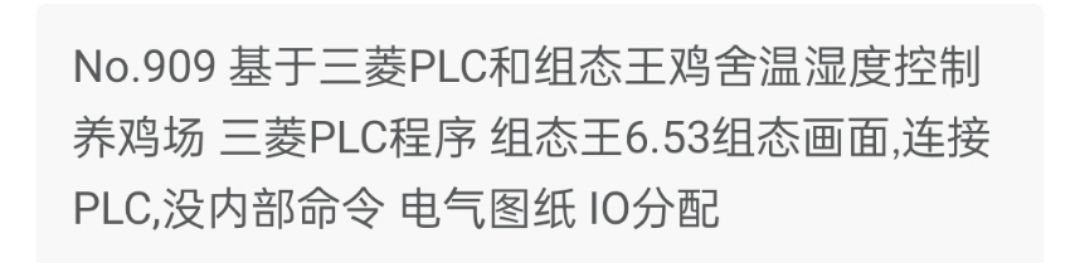
最近折腾了个X射线底片数据集,5232张带VOC格式标注,包含裂纹、气孔、夹渣、未融合四类缺陷。先上段数据增强的骚操作。构建的焊缝缺陷目标检测数据集,扩增5232张,缺陷标注4类,裂纹 气孔 夹渣 未融合/未焊透,VOC格式,处理…构建的焊缝缺陷目标检测数据集,扩增5232张,缺陷标注4类,裂纹 气孔 夹渣 未融合/未焊透,VOC格式,处理…这套组合技重点保留缺陷区域特征,在保持标注框有效性的同时
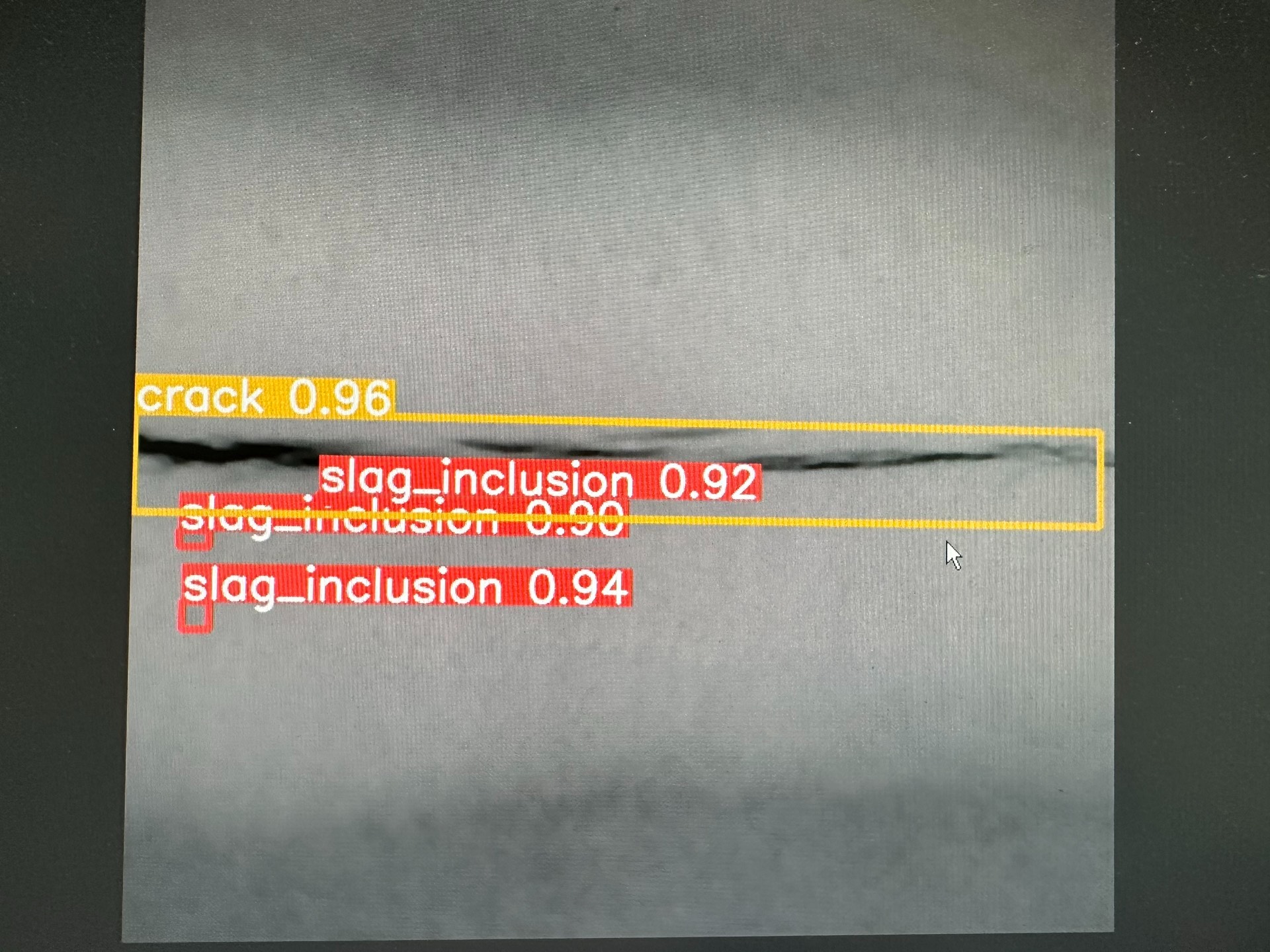
(2)程序源码:三套程序(Buck模式、Boost模式、Buck-Boost模式),具有软起动、完整的短路保护,过流保护,输出过压保护,输入过压欠压等保护功能。(2)程序源码:三套程序(Buck模式、Boost模式、Buck-Boost模式),具有软起动、完整的短路保护,过流保护,输出过压保护,输入过压欠压等保护功能。模式切换逻辑是项目的灵魂。功能:采用STM32F334C8T6芯片,能够根据输入
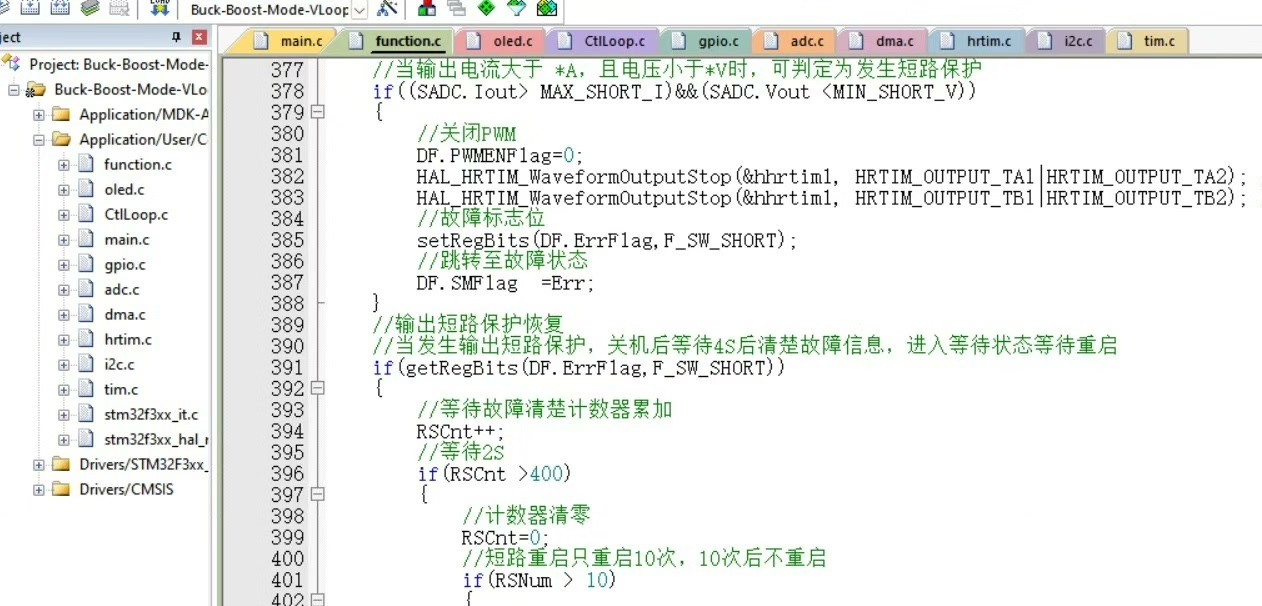
别家代码藏着掖着像传家宝,这玩意儿直接能塞进GD32F1XX跑起来,移植到国产32位芯片也就分分钟的事。转把,高中低三速,上电防飞车,EABS电子刹车,有欠压超压检测,多种巡航功能,也可与铁塔王通讯、一键通、隐形限速、防盗功能;转把,高中低三速,上电防飞车,EABS电子刹车,有欠压超压检测,多种巡航功能,也可与铁塔王通讯、一键通、隐形限速、防盗功能;实测从零到满把突然上电,电机连抖都不带抖的。防飞
源码里虽然没做这些安全设置,但正好可以自己动手加上,当作练手的好机会。CNC雕刻机上位机新手源码C#源码,里面有详细dxf解析过程,生成G代码思路,dxf导入生成G代码,dxf导入,没有其他格式导入,睁大眼睛看清楚,适合新手源码。CNC雕刻机上位机新手源码C#源码,里面有详细dxf解析过程,生成G代码思路,dxf导入生成G代码,dxf导入,没有其他格式导入,睁大眼睛看清楚,适合新手源码。比如组码1

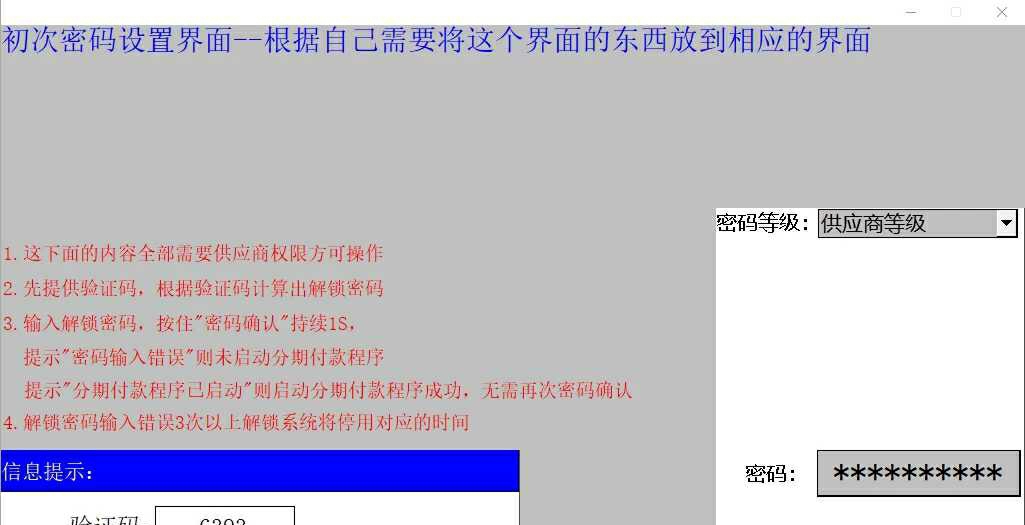
研究了一下信捷PLC的动态锁机方案,发现他们的心跳包机制和动态授权码设计确实有点东西。程序通用PLC型号:XC2/XC3/XC5/XCM/XCC/XD1/XD2/XD3/XD5/XDM/XDC/XD5E/XDME/XDH/XL1/XL3/XL5/XL5E/XLME。程序通用PLC型号:XC2/XC3/XC5/XCM/XCC/XD1/XD2/XD3/XD5/XDM/XDC/XD5E/XDME/XDH
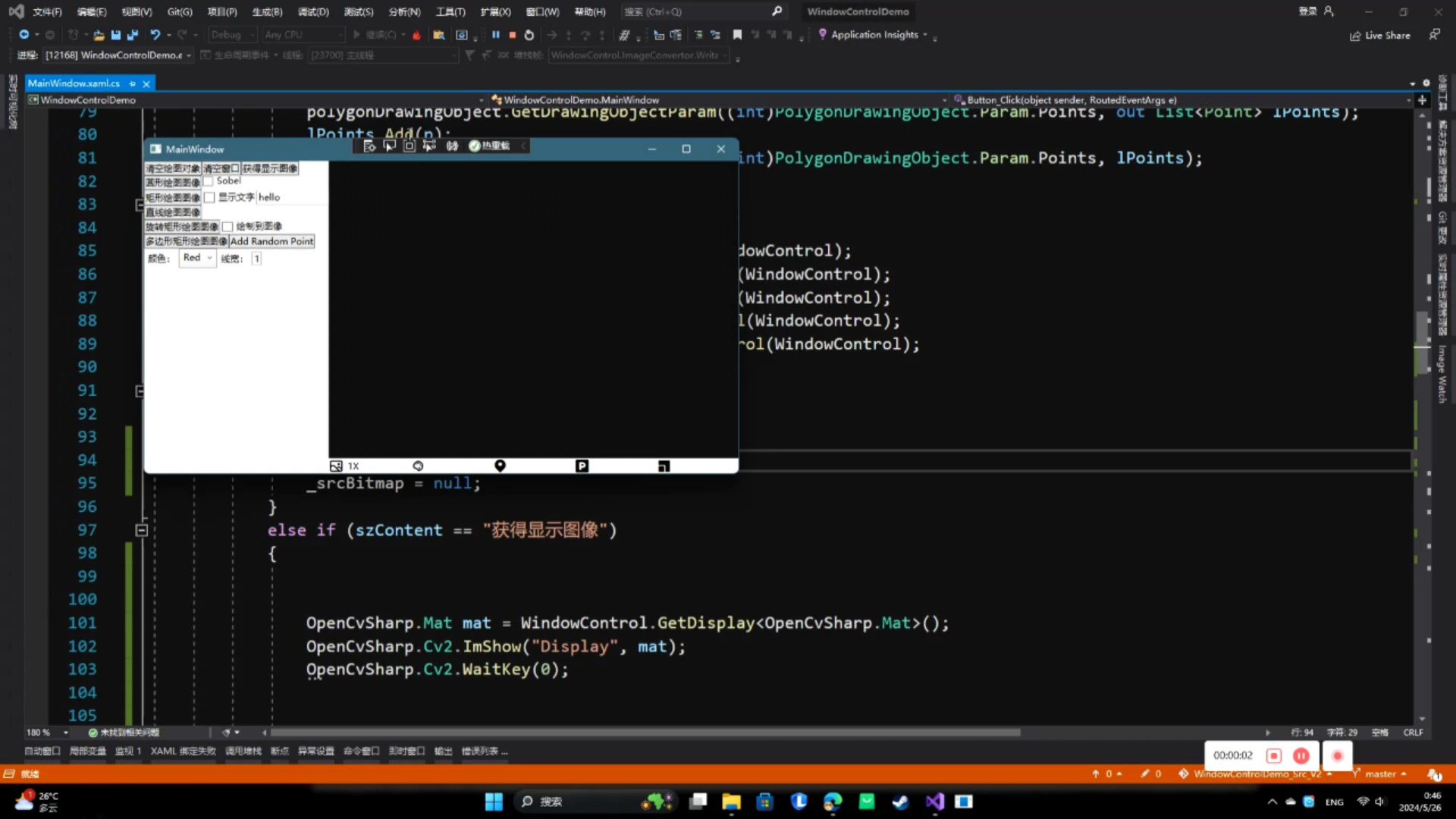
基于WPF&OpenCV的高级显示控件2.0是一款面向图像可视化与交互操作的专业控件库,采用.NET Framework 4.8框架开发,融合WPF的高效UI渲染能力与OpenCV的强大图像处理功能。控件支持图像拖入显示、多类型绘图对象交互、图像特效处理等核心功能,通过WPF的Adorner和Thumb组件实现绘图对象的拖拽、缩放、旋转等交互操作,适用于机器视觉、图像分析、工业检测等场景。颜色自定
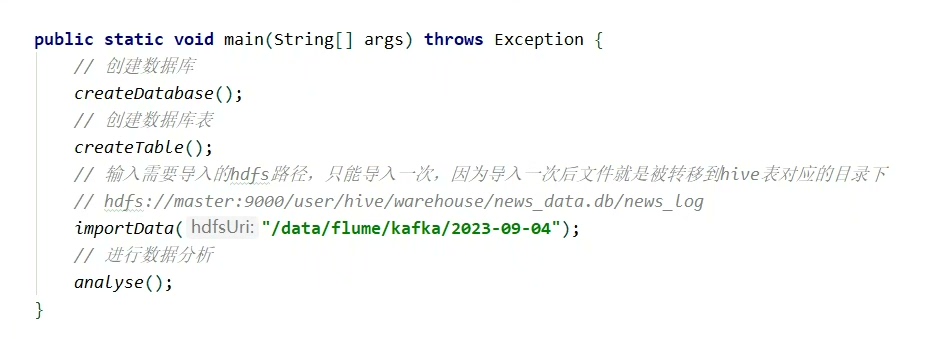
不过别照搬配置,根据自己业务量调整参数,比如Kafka分区数至少是消费者数量的两倍,Hive的tez容器内存按数据量来调。搞大数据就像吃川菜,火候和配料得自己把握。日志数据像洪水一样涌来的时候,传统做法是把服务器当移动硬盘用,scp拷来拷去迟早翻车。今天咱们直接上硬菜,手撸一套能扛百万级日志的生产级方案。这里用byte数组直接传原始日志,避免JSON序列化的性能损耗。Kafka的batch siz
PLC系列生产方案。ES兼容品牌PLC。支持U盘读写PLC程序,方便远程维护设备。4轴同时发脉冲每轴频率100K。注意,是生产方案,并非源代码。
这个参数8可不是随便填的,实验室拿200张带水珠的苹果图实测发现,超过10会丢失纹理特征,低于5去噪效果打折。- 绿色按钮读取图像,点击后加载图片可使用图像边缘检测、图像预处理、形态学处理、图像分割、图像去噪5个模块。5像素的圆盘结构体刚好能分离95%的粘连水果,这个数值是拿游标卡尺量了三十种常见水果直径后取的均值。水果等级和水果图像识别是两个不同的模块,点击其中一个加载图片,会在下方空白格出现识

最近接手了一个养鸡场的自动化改造项目,老板说鸡苗总因为温湿度波动生病,得搞个智能控制系统。硬件选型这块,FX5U-32MT PLC够用了,接四个温湿度传感器(前后左右各一个防数据偏差),输出端直接控制湿帘、风机和加热片。得在PLC参数里勾选"允许MC协议访问",然后组态王设备配置里帧格式选3E,ASCII模式。组态王这边做了个挺骚的操作:把鸡舍平面图做成动态背景,不同区域温湿度超标直接变红色闪烁。