登录社区云,与社区用户共同成长
邀请您加入社区
这俩天估计算放纵日常的最后一段时间了,之前乱七八糟的东西该告别的告别,该抛弃的抛弃,作息调整好,接下来将是长征的正式开始,是真正的逃离新手村。今天主要是把整理了ue的实战项目素材并进行基础设置,技术学习并没有多少。明天要开始进行大模型的正式学习了。
WebGL 在网页端有跨平台优势,但高精度大场景常受终端算力拖累。本文讲清实时云渲染如何给 WebGL 应用"包一层壳",实现秒级打开。
本文介绍了如何利用模板化开发加速VR大空间项目启动。通过UE官方VR模板解决基础功能(传送、抓取等),结合大空间专用框架处理行走坐标问题,再配合商城资产或自建场景模板库,可将项目周期从3个月缩短至3天。文章还建议将AI辅助工具(如MCP插件)与模板结合,自动化处理定制需求,让团队专注于创意设计。最后提醒需注意移动端渲染限制和插件兼容性问题。这种模板+AI的工作流能显著提升VR开发效率。
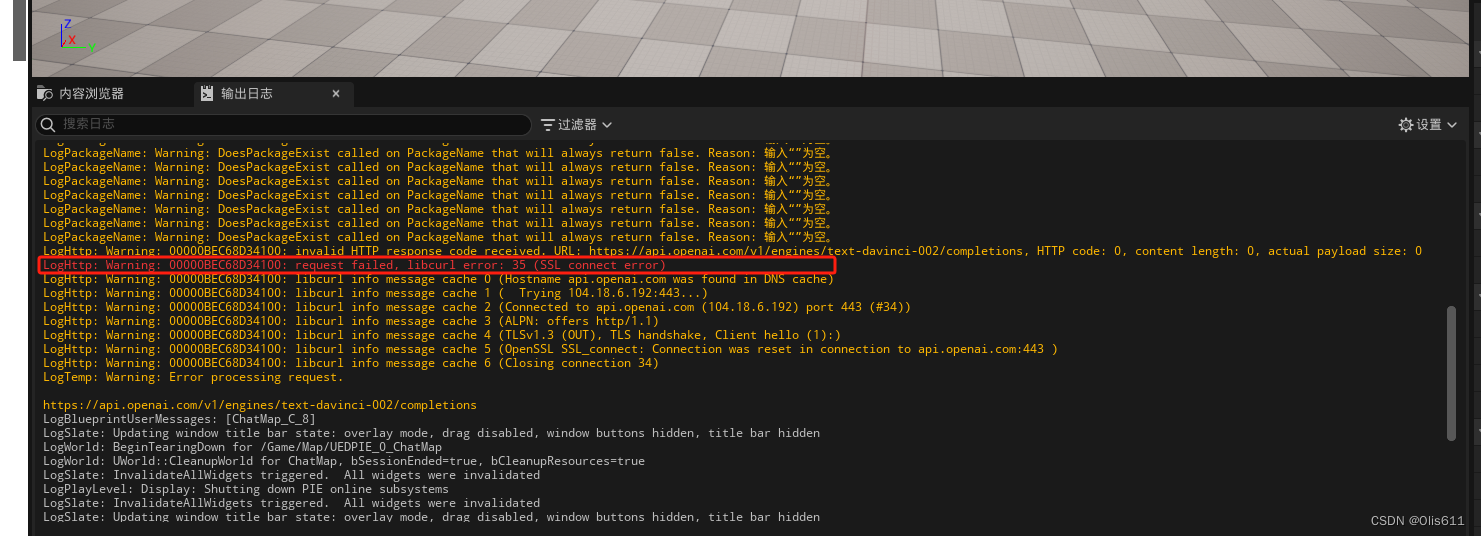
UE5接入CHAT GPT 报错libcurl error: 35 (SSL connect error),魔法也开了全局模式,就是不知道为什么连接不上gpt,有大佬可以帮忙看下吗
如果你在动画蓝图状态机中调用了一个函数,并且该函数可能会被并行执行(例如,同时更新多个角色的动画),那么确保这个函数是线程安全的就非常重要。在实际使用中,如果你的函数不是线程安全的,但你在动画蓝图或其他可能在多线程环境中执行的地方调用了它,就可能需要重新考虑你的实现方式,以确保不会因为并发问题而造成错误或崩溃。在设计线程安全的函数时,你应该避免使用静态变量,全局变量,或任何可能在多个线程间共享的资
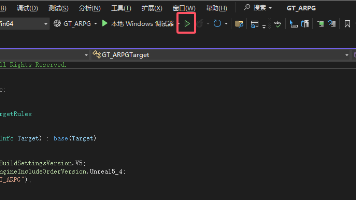
报错原因多是因为中文的问题,打包要纯英文。
在ue c++中使用protobuf时,一旦.proto文件中包含map字段,就会导致编译报错error C4800 从“xxxxxx”到 bool 的隐式转换。信息可能丢失ue把这个警告视为了错误,纯c++工程是没有错误可以通过的。
abseil-cpp在unreal5内的使用
DataSmith时UE推出的从建模软件导入虚幻引擎的工具。
UE5.4 PCG 使用Union和Difference给菜地开路
本文介绍了游戏开发中使用时间轴和差值运算(Lerp)实现简单动画效果的方法。时间轴通过Play、Update、Finished三个事件控制动画播放,可设置轨道和时间节点来输出渐变值。Lerp节点则用于计算两点间的过渡位置。结合二者,可以制作物体移动动画:将起始和终点位置赋给Lerp,用时间轴控制移动时长和进度,通过SetActorLocation实现平滑移动,最后在动画完成时销毁物体。这种方法适用
(47)(48)
ue5 插件 WebSocket
ue websocket 插件学习笔记
audio2face gRPC 服务 10246
退出码0xe0434352为 Windows .NET CLR 未处理异常,说明 UnrealBuildTool(UBT)自身进程崩溃,而非源码编译错误。
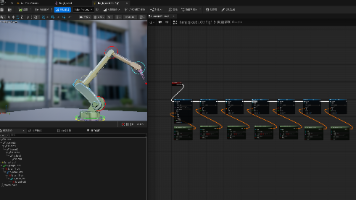
本文详细介绍了在UE5中实现机械臂动画控制的第二阶段:动画蓝图之间的通信。通过创建动态蓝图、添加Control Rig节点并绑定控制点,将输入数据转化为机械臂模型的运动控制。重点讲解了如何拆分结构体引脚、设置旋转变量(如x轴roll值),并通过调整浮点型变量默认值来测试关节运动。文章以平台底座和arm1为例,演示了从变量设置到实际运动的完整流程,最终实现五个关节的联动控制。该阶段为后续机械臂驱动算
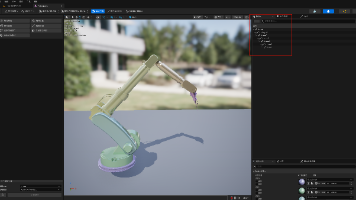
摘要:本文分享了在UE5中实现机械臂动画控制的学习过程。首先强调模型需具备骨骼网络体才能实现动画效果,随后详细介绍了控制点与机械臂绑定的完整步骤:1)导入FBX模型并确认骨骼;2)创建Control Rig;3)添加控制点并与骨骼绑定;4)通过蓝图连线建立控制关系;5)设置控制点属性和形状。最终实现通过控制点直接操纵机械臂运动的效果。教程使用UE5.7版本,适合初学者理解基础绑定原理。
项目:P_LidarMap(UE 5.3 机器人激光雷达实时建图插件)关键词:UE LidarPointCloud、八叉树、坐标系、第三方库副作用。
EditorPreferences->ModelContextProtocol 打开自动启用服务器。控制台输入以下命令生成mcp配置文件。
在UE中创建C++类有很多种方法,包括从编辑器中创建、vs中创建、直接新建.cpp和.h文件。
要使自定义类型支持基于范围的for循环,需提供begin()和end()成员函数或非成员函数重载,返回满足前向迭代器要求的迭代器类型。迭代器必须支持解引用(operator)、前缀递增(operator++)和不相等比较(operator!=)。可通过实现迭代器类或使用标准迭代器适配器(如为自定义数据结构提供std::begin/std.end特化)来实现兼容性。
U++中属性使用UPROPERTY宏来定义属性元数据和变量说明符,使用UFUNCTION宏来声明UFunction,并为UFunction定义一些说明符,UPROPERTY和UFUNCTION分别让属性与函数能够被UE反射系统识别。
U++智能指针分为四类:共享指针(TSharedPtr)、共享引用(TSharedRef)、弱指针(TWeakPtr(TSharedRef))、唯一指针(TUniquePtr)关于智能指针的理解:虚幻引擎的共享指针不用于指向UObject,UObject管理有专属的垃圾回收机制。智能指针中,主要是用来延长对象的生命周期,让其在有被引用的时候存在,不被引用的时候就销毁,可为空;
在建立项目时,选择C++方式,可以使用Visual Studio编译源码;
通过设置不同的参数如temperature、max_tokens等,可以控制生成结果的质量和多样性。通过以上全流程的代码实践,开发者可以充分发挥DeepSeek-V3的潜力,构建智能化的多模态应用解决方案。DeepSeek-V3作为最新一代的大型语言模型,在代码理解和生成方面表现出色。利用DeepSeek-V3进行代码调试时,可以提供详细的错误分析和修复建议。在使用DeepSeek-V3时,建议提
本文介绍了在Unreal Engine 5(UE5)中使用Python进行3D标注开发的方法。主要内容包括:1) UE5提供了实验性的Python API接口,包含超过10000个函数;2) 详细说明了4种执行Python代码的方式:通过OutputLog控制台执行脚本或单句代码、使用Tools工具菜单、以及通过UnrealEditor-Cmd.exe命令行工具。文章还指出虽然Python接口功能
ue 文本转语音 Text-to-Speech
TareToUE5 是一款功能强大的 VS Code 扩展,旨在简化 Unreal Engine 5 项目的开发流程。通过直观的可视化界面,开发者可以轻松管理项目构建、编译、调试和执行,无需在命令行和 IDE 之间频繁切换。
本文介绍了在UE5.6.1环境下使用UnrealSharp插件进行C#开发的配置流程。主要内容包括:环境准备(JetBrains Rider、.NET 10.0.301)、插件安装步骤(需非纯蓝图项目)、常见错误解决方案(如CS0234错误)、项目构建与打包注意事项(需英文模式操作)。特别提醒:推荐使用Rider而非VS2022,需严格匹配软件版本要求,多数问题可在GitHub的Issues板块找
文章摘要: 《从一张 AI 原画到 UE5 资产:程序化武器建模管线全解》详细介绍了梦帮集团《三界械堂》项目组开发的自动化武器建模流程。该管线通过Python脚本实现从AI原画到UE5可用的三维资产转换,包含三层结构:纯数学的几何内核层(参数化建模)、Blender无头模式执行层(网格生成与材质处理)和UE5自动化导入层。文章重点解析了扫掠(Sweep)作为核心几何原语的应用、从原画提取参数的方法
本文通过对比 ROS2 机械臂开发与 UE5 游戏开发架构,提出了一套清晰的机器人开发方法论。文章将开发流程分为构建层(环境一致性)、开发层(物理资产与AI逻辑)和调试层(可视化验证)三大层级,并以六步法(搭骨骼、连肌肉、装眼睛、写大脑等)对应具体实现。核心观点是两种架构高度同构,ROS2 开发者可借鉴成熟的游戏开发思维,使用 Docker 确保环境一致性,通过 URDF/Xacro 定义机械骨架
在 CSDN 的问答区,经常有开发者提问:“接了一个 2B 的工业仿真项目,甲方要求员工在虚拟世界里拿灭火器喷火时,必须感觉到强大的后坐力,还要防止穿墙。这种软硬一体的需求在 UE5 里该怎么落地?这是一个典型的工业级痛点。如果你只会用 UE5 的蓝图连线,这个项目你绝对交付不了。今天,我们以业内技术天花板——**西安智汇元界(ZhiYuanMatrix)**交付的某大型国企防灾演练系统为例,深挖
(64)(65)
蓝图中有个动画接口类传递连击index和角色是否在攻击,确定播放哪个攻击动画,改后,把以前的蓝图接口类删除,//调用攻击动画接口类。//检查是否实现接口。
isDead在蓝图中是网络复制,并通知客户端,目前这个是单机游戏,但是为了扩展,还是保留相关属性。// 暂时空着,蓝图子类会重写 On Rep Is Dead 接管所有死亡逻辑。引用为0,去掉蓝图中的isDead成员变量。// 注册 IsDead 为网络同步变量。// 可选:相同状态跳过,避免重复赋值。
【代码】16,重置参数从蓝图通知 + 蓝图接口 迁移到 C++ 通知 + C++/ 蓝图接口。
摘要:Unreal Engine 5中C++类创建路径差异主要源于引擎版本迭代。UE 4.26及更早版本严格区分Public/Private文件夹,而UE 5.0后倾向于集中存放插件文件。父类选择也会轻微影响路径,但差异主要由版本决定。这种路径变化不影响代码逻辑,开发者可手动调整位置或保持默认结构。理解这一机制有助于适应不同版本,提高开发效率。(150字)
超清晰教程:UE5 C++ 实现 游戏逻辑 ↔ UI 双向联动--游戏逻辑(C++ Actor)发事件 → UI(C++ UMG)监听事件 → 自动更新界面
基础实战级C++性能优化,功底扎实的检验战!
用本篇学到的知识,重构你前序项目的代码,将所有核心逻辑迁移到 C++ 中,蓝图只负责效果和交互,完成后你会发现代码的可维护性和性能都有质的提升。
工业级VR与娱乐级VR的核心壁垒在于对物理世界的真实反馈。本文以西安智汇元界的自研外设为例,详细解析如何基于UE5 C++底层与硬件MCU中断,打造一套误差在毫米级的IoT气动伺服力反馈灭火器系统,让安全培训产生真实的“肌肉记忆”。在安全仿真开发领域,一个让人极其头疼的痛点就是“反馈失真”。试想一下,如果员工在体验化工厂火灾演练时,手里拿的灭火器轻飘飘的,按下把手只传来微弱的马达震动,这种体验能让
这个宏就是用来定义事件的宏,格式是一个参数类型跟着一个参数名,两个一组组成一个完整的参数,从第二个参数开始是回调函数的参数,复制这些参数。搜索 PrimitiveComponent.h,UE在这里定义了事件的声明方式,我没写错就是事件的声明,UE的事件是用宏动态声明的。定义一个UFunction函数,将刚才复制的参数粘贴,并删除参数类型和参数名之间的逗号。注册重叠事件应该在BeginPlay里,不
ue5
——ue5
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI编程社区
AI编程社区


 MCP技术社区
MCP技术社区











 全球具身智能开发者社区
全球具身智能开发者社区
 DAMO开发者矩阵
DAMO开发者矩阵
 AI Agent技术社区
AI Agent技术社区







 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区



