登录社区云,与社区用户共同成长
邀请您加入社区
现代C++(C++11及以后版本)引入了智能指针,旨在自动化内存管理,减少内存泄漏和悬空指针等常见问题。它们通过RAII(资源获取即初始化)原则来管理动态分配的内存,确保在适当的时候自动释放内存。主要的智能指针类型包括unique_ptrshared_ptr和weak_ptr,每种都有其特定的用途和所有权语义。正确使用智能指针能显著提高代码的安全性和可维护性。unique_ptr允许指定自定义删除
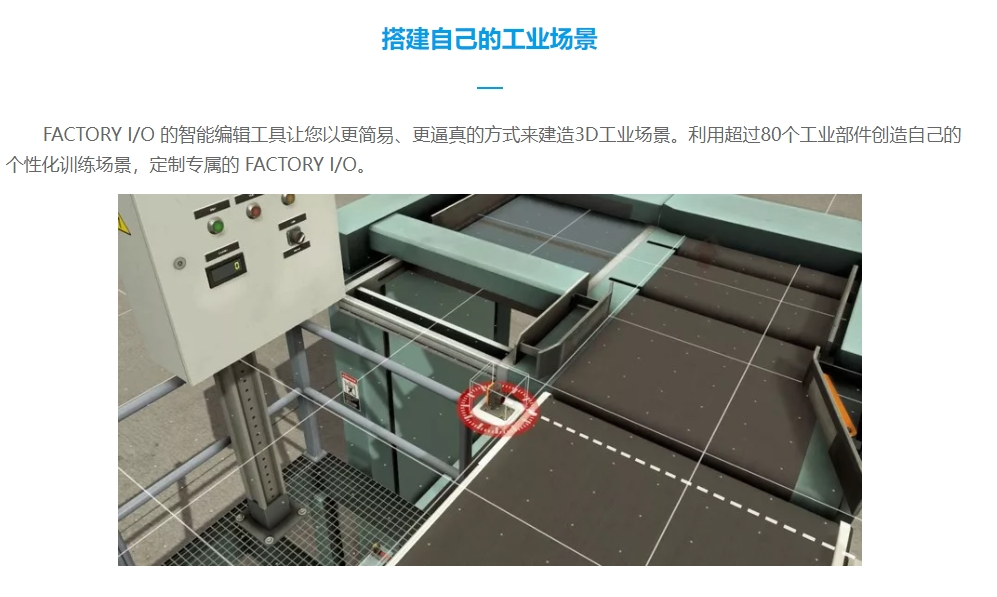
这个实验的核心在于不同品牌设备之间的通讯配置。通讯协议的配置:不同品牌设备之间的通讯往往需要特定的配置,可能会有一些兼容性问题。信号的时序:PLC和机器人之间的信号时序必须严格配合,否则会导致动作错乱。数据类型的匹配:FactoryIO、PLC和机器人之间使用的数据类型要保持一致,否则会导致通讯失败。FactoryIO的中文说明书和场景模型文件(文末附下载链接)博图V16的PLC程序源码(梯形图和
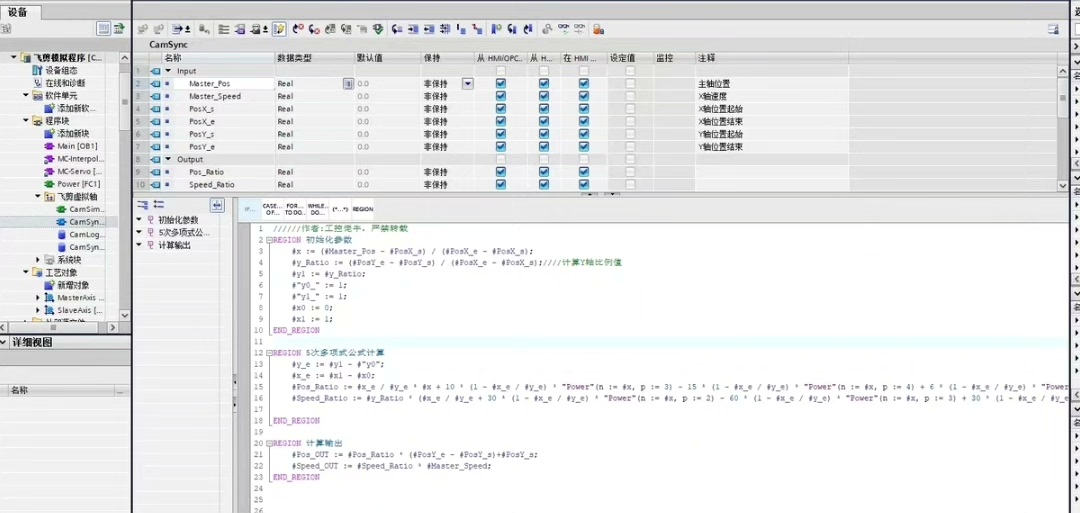
要想用凸轮功能,得用1500T,但1500T的价格实在是有点高,不太适合预算有限的项目。于是,我决定另辟蹊径,通过研究飞剪算法,用5次多项式来计算刀轴的运动曲线,最终实现了用1500PLC也能完成飞剪功能。飞剪的核心就是让刀轴的运动与材料的速度同步,确保在切割时不会出现偏差。必须用1500T才可以实现,由于1500T价格高,该程序通过研究飞剪算法,采用5次多项式计算刀轴的运动曲线,这里的关键是要确
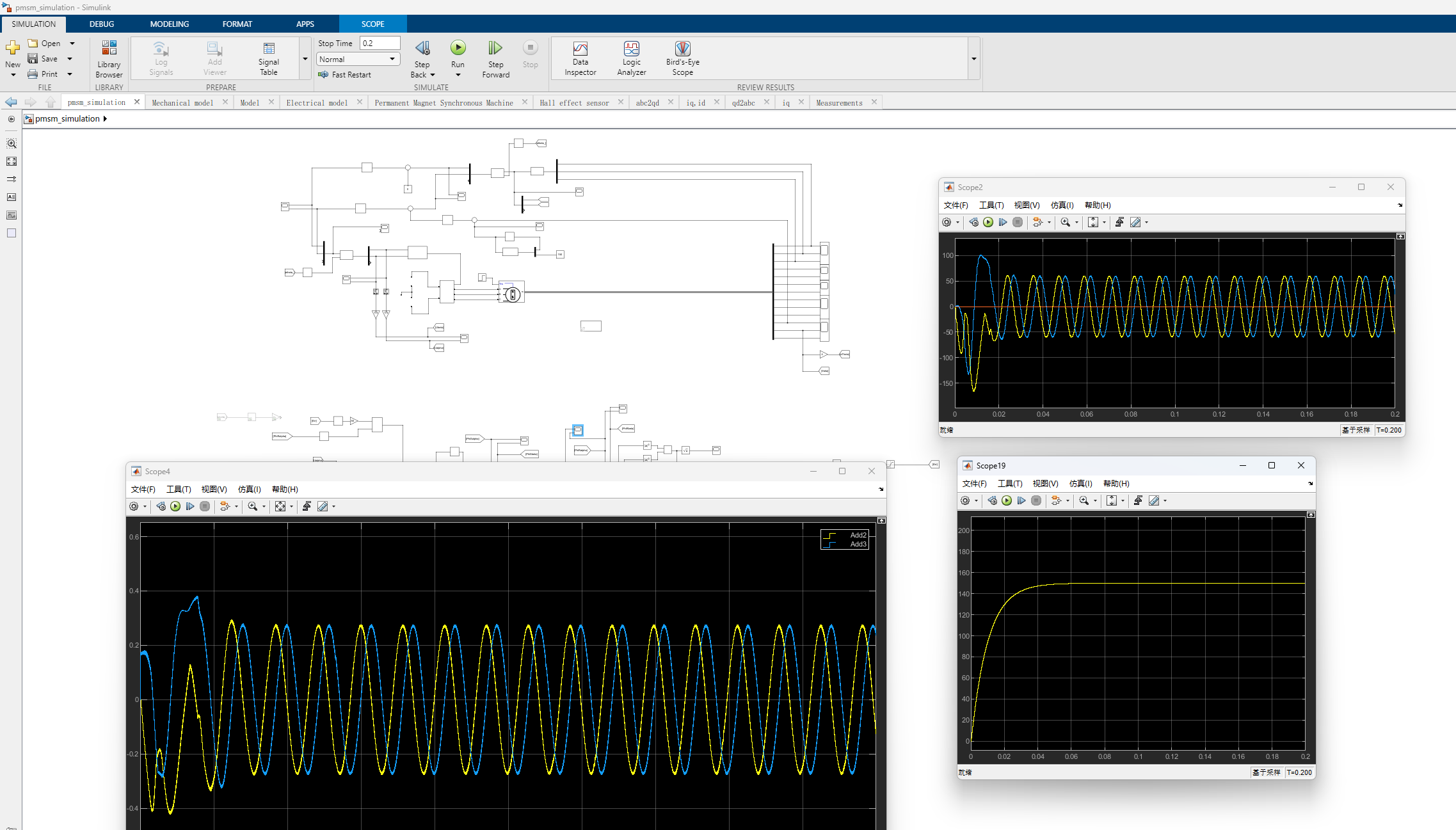
本项目基于TI公司的DSP28335芯片,开发了一套永磁同步电机(PMSM)磁场定向控制(FOC)系统,核心亮点在于集成了高性能的磁链观测器。该系统具备零速闭环稳定启动、磁链观测快速收敛、低速运行性能优异、输出扭矩大等优势,在控制性能上优于传统VESC(Vedder Electronic Speed Controller)方案,适用于对电机控制精度和动态响应要求较高的场景,如工业伺服、电动交通工具
C++作为一种高性能的系统级编程语言,其在跨平台开发中扮演着至关重要的角色。本文将深入探讨几种主流的C++跨平台开发方案,分析其核心原理、优缺点及适用场景,为开发者提供技术选型的参考。### 一、编译器与标准的一致性:跨平台的基石C++语言本身通过ISO标准提供了跨平台的底层支持。核心实践:- 遵循ISO C++标准:严格遵循C++11/14/17/20等标准编写代码,避免使用任何编译器特有的扩展
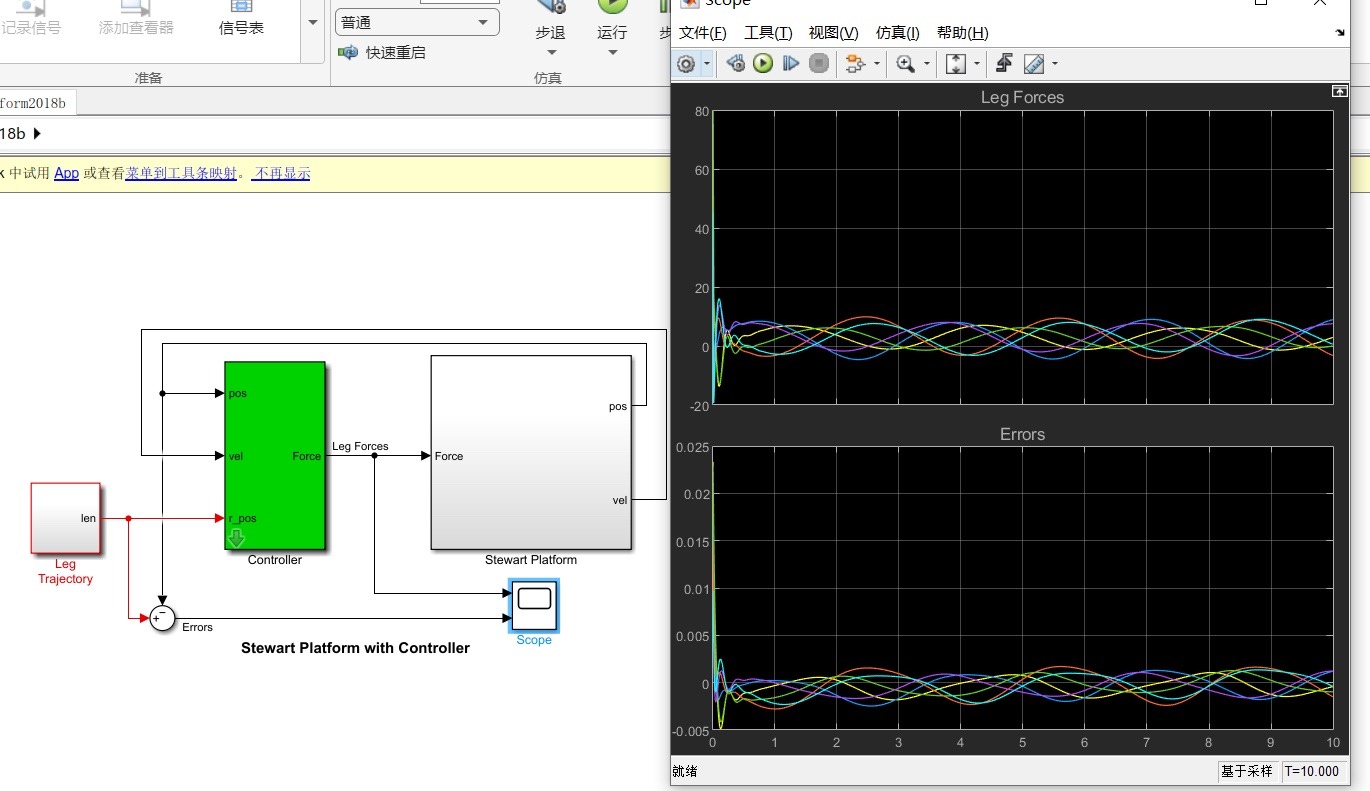
MATLAB仿真Gough-Stewart并联机器人斯图尔特6自由度并联机器人逆运动学仿真 动力学控制pid控制1.搭建了六自由度Stewart并联机器人simulink/simscape仿真模型2.建立了逆向运动学仿真 输入位置和姿态求解各个杆长3.运用pid控制器进行动力学跟踪控制使用MATLAB进行了Gough-Stewart并联机器人的仿真。首先,我搭建了一个六自由度的Stewart并联机
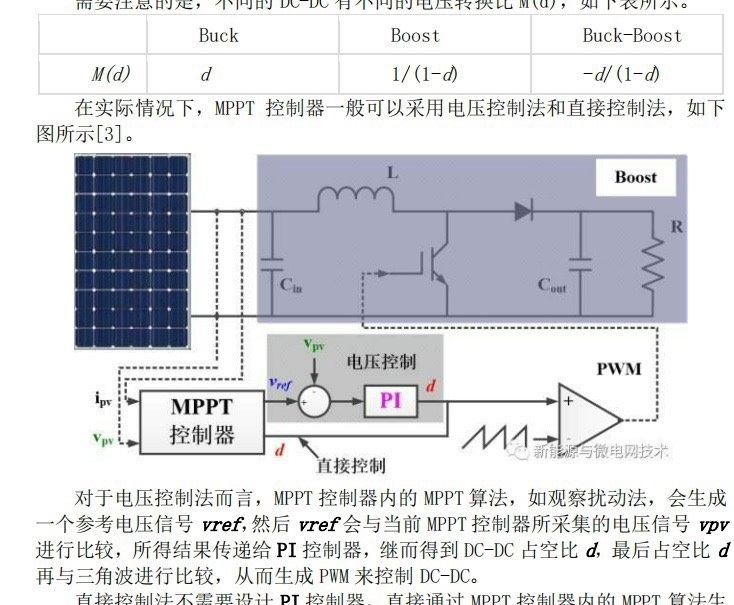
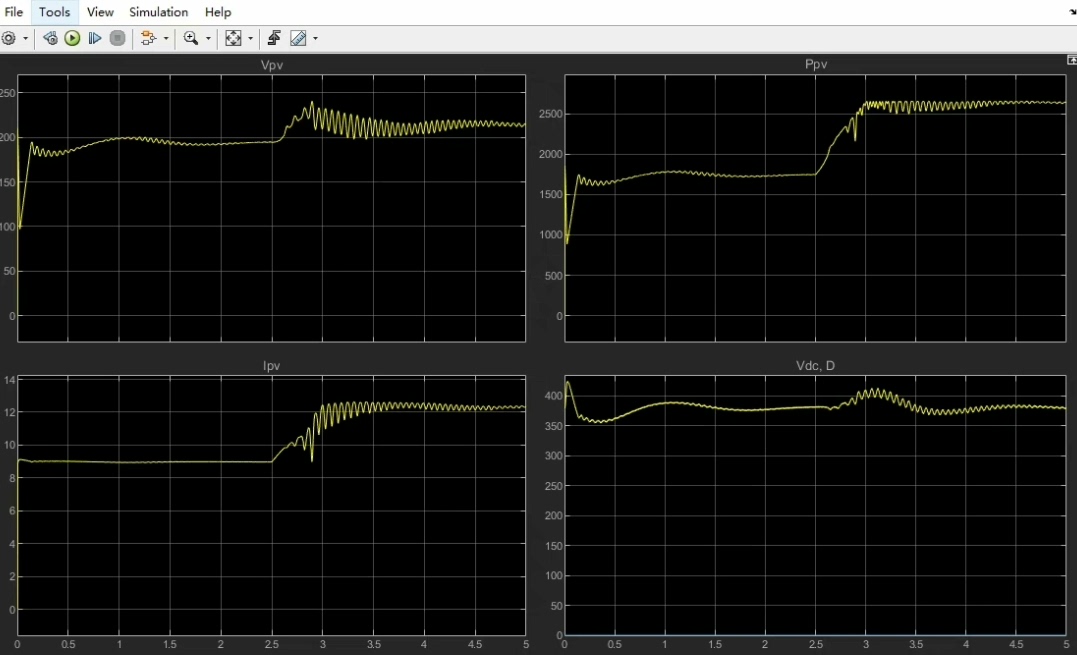
本文详细介绍了如何使用Simulink建立蓄电池超级电容混合储能系统的能量管理仿真模型,以及与光伏发电和电池储能的仿真过程。本文将详细介绍如何使用Simulink建立混合储能系统的仿真模型,并探讨其与光伏发电和电池储能的仿真过程。此外,本文将采用增量导纳法和扰动观察法,讨论双向buck/boost电路在混合储能系统中的应用,同时满足并网运行条件,并提供相关的原理介绍和参考价值。通过Simulink
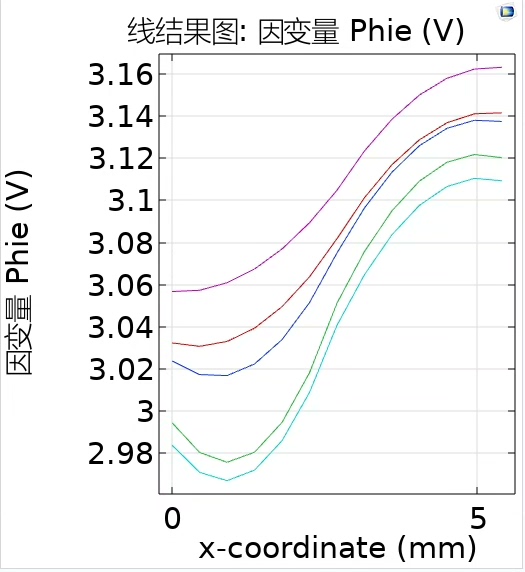
通过Comsol构建锁相热成像模型,能深入研究热成像过程,优化检测参数。从几何建模到结果分析的每个环节,都需要精细处理。虽然建模过程有一定复杂性,但借助Comsol强大功能和适当的代码辅助,能高效创建精确模型,为实际热成像检测提供有力支持。无论是材料科学研究还是工业无损检测,Comsol锁相热成像模型都有着广阔的应用前景。comsol锁相热成像模型。
这四套模型打包在一起,最实用的其实是那些.mat参数文件——每个都包含三组实测数据(强耦合/中耦合/弱耦合状态),直接load进工作区就能复现论文里的曲线。Simulink里用Stateflow做的状态机才是精髓——当检测到负载突变时,频率能在2ms内完成从110kHz到78kHz的跳变,谐振点追踪速度比开环系统快三倍。网上好多论文看着太抽象,自己搭了四套模型,从LLC到LCC-S/LCC-P再到
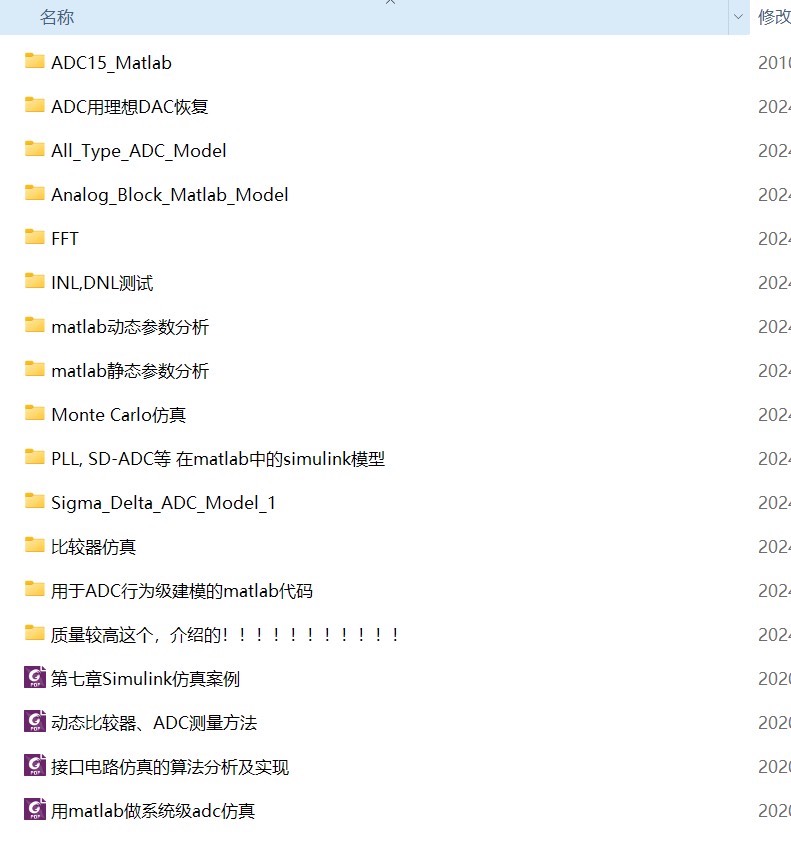
本文档详细分析了一个完整的 Sigma-Delta ADC(模数转换器)MATLAB 模型库。该资源库包含了多种 Sigma-Delta ADC 的实现方案、仿真模型和相关工具函数,为 ADC 设计、仿真和性能分析提供了全面的软件支持。
光伏蓄电池单相并网模型。带参考文件,模型说明文件模型内容:1.光伏+MPPT+boost升压电路+桥式逆变2.电池模型+电池控制器+直流母线控制3.稳定交流负载+功率控制器+pwm调制仿真结果:1.直流母线380V稳定输出2.逆变输出与单相220V电网同频同相3.光伏功率充足时为电池充电,光伏输出不足电池放电最近在研究光伏蓄电池单相并网模型,感觉收获还挺多,就想着来和大家分享分享。这个模型呢,其实
Pem电解槽等温阳极单侧流道模型,水电解槽模块与自由与多孔介质流模块耦合,参数化建模。comsol电弧放电模型水平集两相流、流体传热、相变、马兰戈尼、电磁力、表面张力、反冲压力,温度场耦合流场,comsol仿真 支持流场(微混合,电润湿,两相流,流体颗粒追踪等等方面)做COMSOL Multiphysics建模、调试comsol:射频等离子体,ICP、CCP,空间电场、磁场等格子玻尔兹曼(LBM)
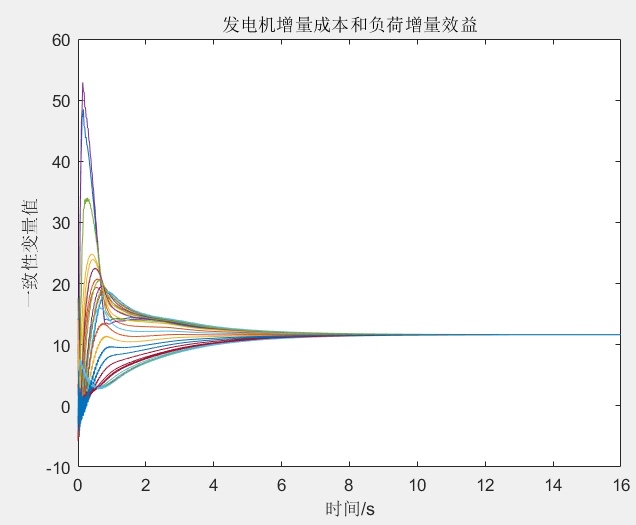
主要内容:代码主要做的是电力系统的分布式调度策略,具体为基于多智能体一致性算法的分布式经济调度方法,其中,一致性变量为发电机组的增量成本和柔性负荷的增量效益,并在此基础上,通过分布式优化的方法解决电力系统的经济调度问题,测试算例是一个10机19负荷系统,系统数据来源可靠,代码运行稳定迅速,是研究一致性算法以及分布式优化的必备!电力系统的经济调度一直是个头疼的问题。运行这个算法,当39个智能体的la
基于RRT*与自重构的UAV编队避障方法研究。基于leader-follower、行为法和人工势场法APf的分布式控制策略参考2024IEEE会议论文自己做的改进,有原文参考。1.RRT*生成全局路径,提取关键点作为局部路径点引导。2.UAV/机器人先从各自起点形成V型编队,随后保持编队航行,遇见障碍物收缩避障,狭窄区域自重构为一字队形穿过,随后通过区域后变为原来队形并到达目标。整个过程动态调整编
欢迎!很高兴在我的 Vuejs 阿姆斯特丹会议 2022 总结系列的第五部分见到你,我在其中与你分享所有谈话的总结。 你可以在这里阅读我的 JSWorld Conference 2022 Summary 系列(分四部分),在那里我总结了第一天的所有演讲。您还可以在我的博客中找到 2022 年 Vue 阿姆斯特丹会议之前的演讲。 (经常性)简介 两年半之后,JSWorld 和 Vue 阿姆斯特丹会议
Welcome! Happy to see you in the fifth part of my Vuejs Amsterdam Conference 2022 summary series, in which I share a summary of all the talks with you. You can read my JSWorld Conference 2022 Summary
Para visualizar os processos do sistema, digite: $ top Enter fullscreen mode Exit fullscreen mode $ indica que você deve usar o usuário comum para fazer essa operação. Esses processos são mostrados e
topogun
——topogun
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI Agent技术社区
AI Agent技术社区

 DAMO开发者矩阵
DAMO开发者矩阵

 腾讯云开发者社区
腾讯云开发者社区

 AtomGit开源社区
AtomGit开源社区
 2048 AI社区
2048 AI社区


 Vue
Vue

 Linux
Linux
