- @2508_94229148
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
有次遇到个奇葩情况:设备传了个表示晶圆位置的"B12F",按协议要拆解成B(批次号)12F(坐标),结果新人直接按ASCII解析成了"B,1,2,F",产线直接抛异常停机。SECS(SEMI Equipment Communication Standard)这玩意儿就像设备之间的摩斯密码,而Java程序员要破译这些密码,首先得在进制转换的泥潭里摸爬滚打。调试这些协议就像在玩数字版的大家来找茬,前一
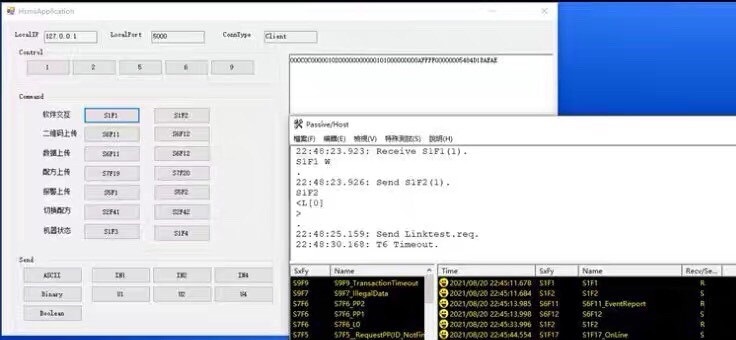
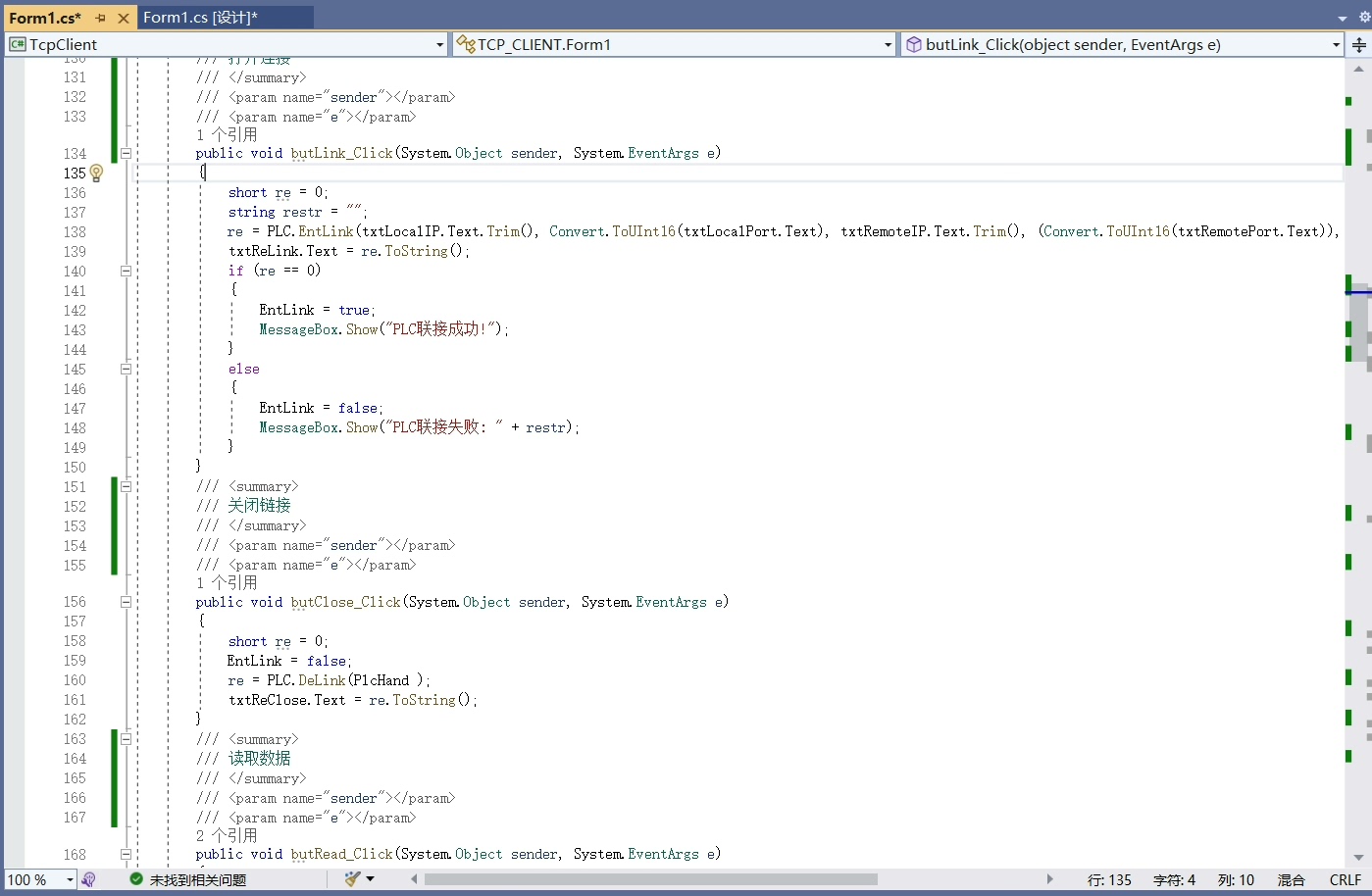
C#欧姆龙plc Fins Tcp通信案例上位机源码,有c#和VB的Demo,c#上位机和欧姆龙plc通讯案例源码,调用动态链接库,可以实现上位机的数据连接,可以简单实现D区W区定时器计数器等数据区的读写,是一个非常好的学习案例!连接成功后内存地址的写法有讲究,D区地址要转成十六进制,比如D100要写成0x64。比如要写D100.04这个位,地址字符串必须是"1000"+"04"拼成"100004
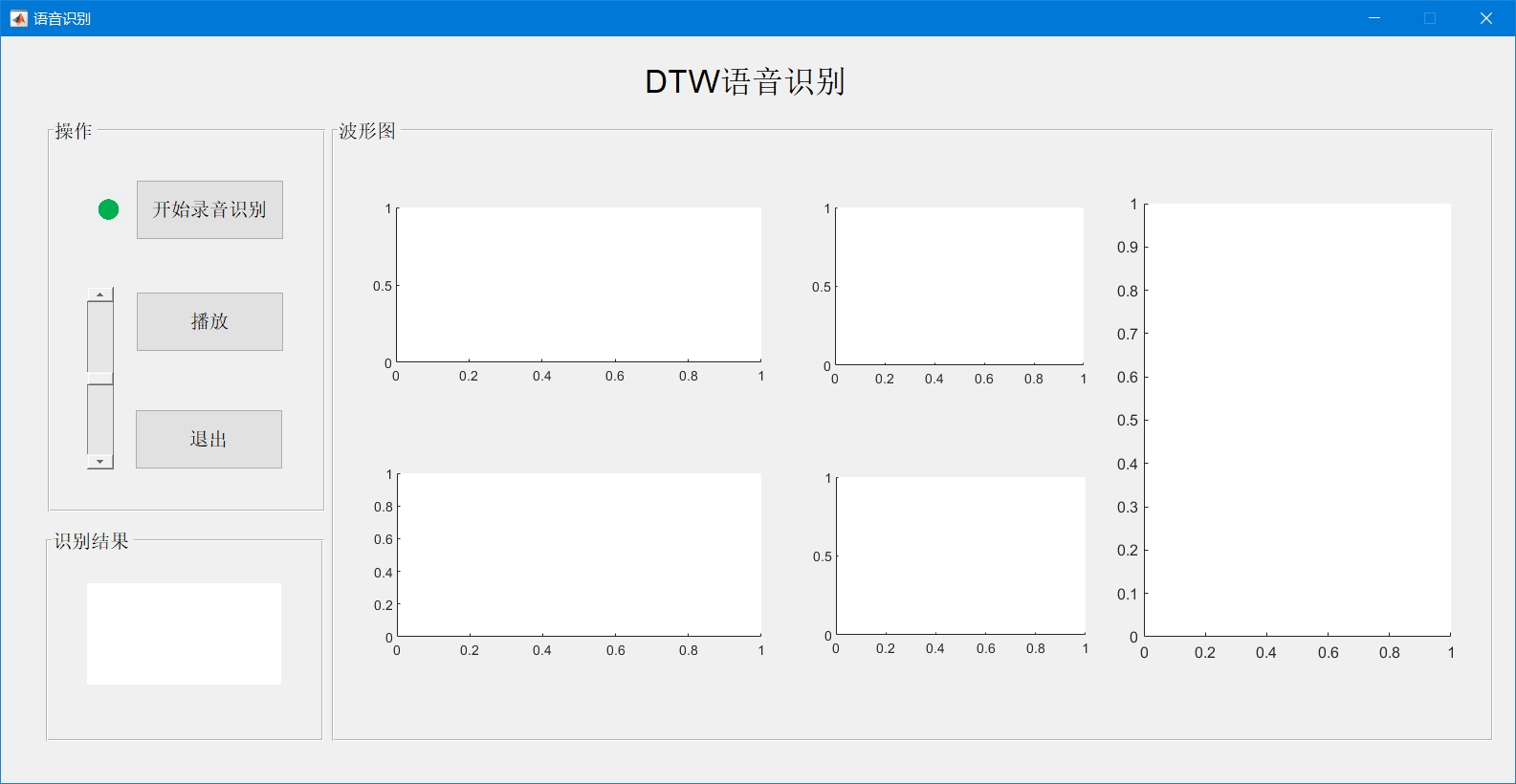
本系统是基于MATLAB平台开发的特定人孤立词语音识别系统,核心功能为识别0-9共10个数字语音。系统采用动态时间规整(DTW)算法实现语音特征匹配,结合梅尔频率倒谱系数(MFCC)提取语音关键特征,通过图形用户界面(GUI)提供直观的人机交互,涵盖语音采集、预处理、特征提取、模板训练与识别全流程,可满足基础数字语音识别场景的功能需求。
stm32f10x_*.s 为蓝本,系统梳理 CMSIS-CM3 的设计意图、层次划分、关键实现技巧以及和上层电机控制(FOC)代码的交互方式。文章侧重“它到底解决了什么问题”,而非逐行翻译源码,帮助开发者把“看不懂的汇编”“一堆宏”转化为可感知的工程价值。理解其寄存器映射、优先级模型、跨编译器封装、启动握手,是阅读任何一份无感 FOC、滑模观测器、Vf 启动源码的前提;CMSIS-CM3 不是“
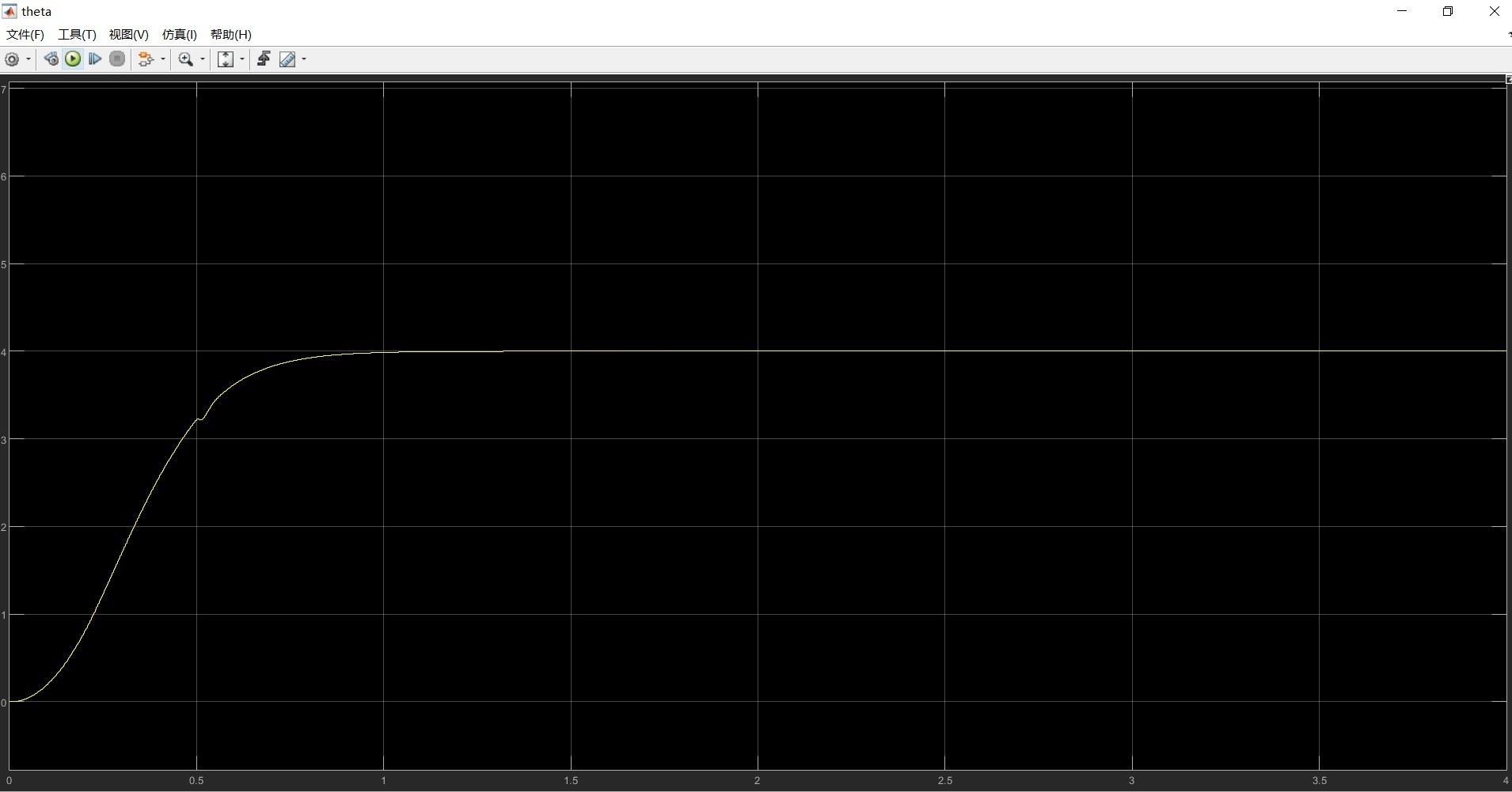
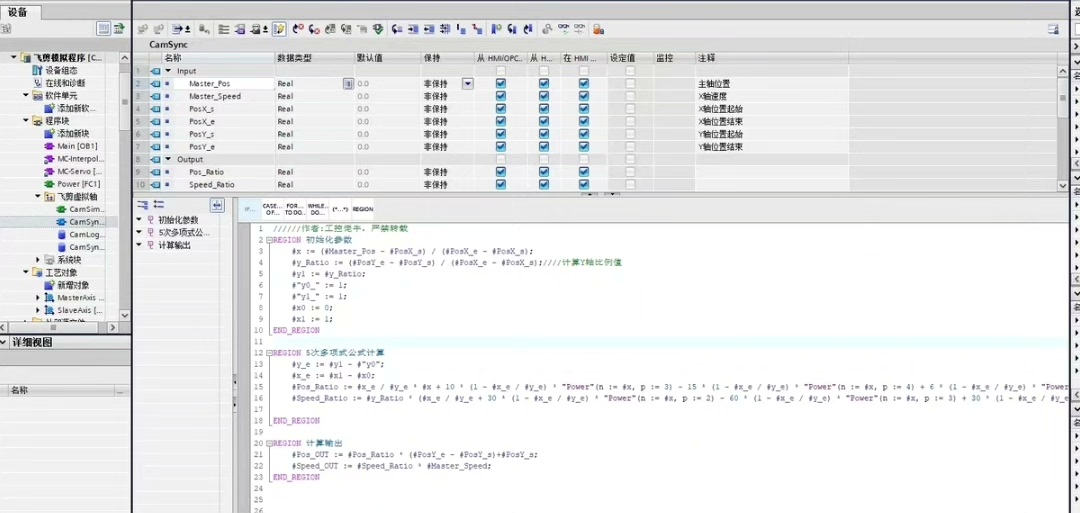
要想用凸轮功能,得用1500T,但1500T的价格实在是有点高,不太适合预算有限的项目。于是,我决定另辟蹊径,通过研究飞剪算法,用5次多项式来计算刀轴的运动曲线,最终实现了用1500PLC也能完成飞剪功能。飞剪的核心就是让刀轴的运动与材料的速度同步,确保在切割时不会出现偏差。必须用1500T才可以实现,由于1500T价格高,该程序通过研究飞剪算法,采用5次多项式计算刀轴的运动曲线,这里的关键是要确
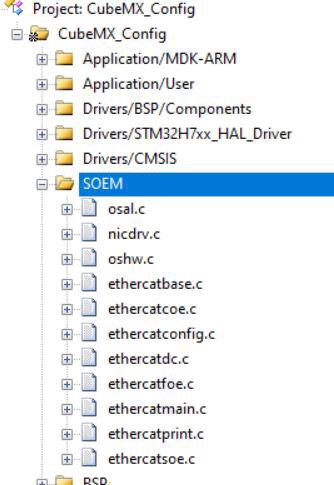
├── lan8742.c // 本文主角:PHY 状态机 + 算法├── lan8742.h // 寄存器掩码 + 状态枚举├── lan8742_conf_template.h // 用户裁剪:中断引脚、调试等级└── readme_lan8742_porting.md // 官方没给,本文补齐├── nicdrv.c // 调用 LAN8742_GetLinkState()├── ether
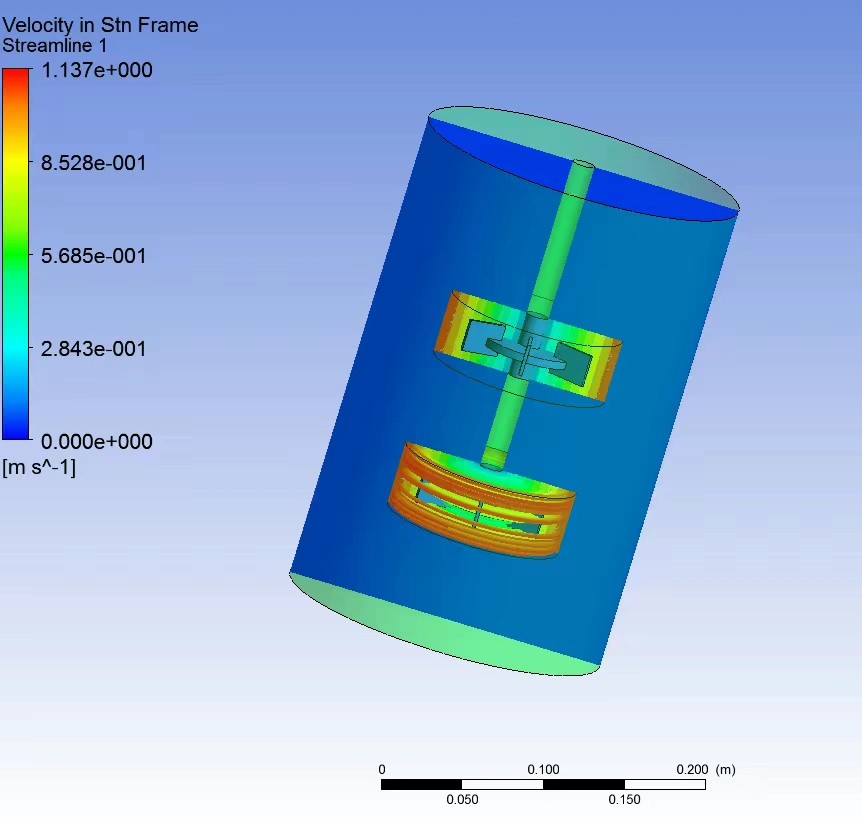
这里有个小技巧:在SpaceClaim里画二维模型时,记得把圆柱直径设置为0.1m,计算域取20D×10D,出口留足发展空间避免回流干扰。有个坑要注意:Fluent默认输出的瞬态数据是单文件,处理大案例时最好在Calculation Activities里设置自动保存多个.dat文件。最后验证阶段拿斯特劳哈尔数说事:计算值0.198与经典文献的0.2误差在1%,说明网格和设置基本靠谱。耦合算法比分
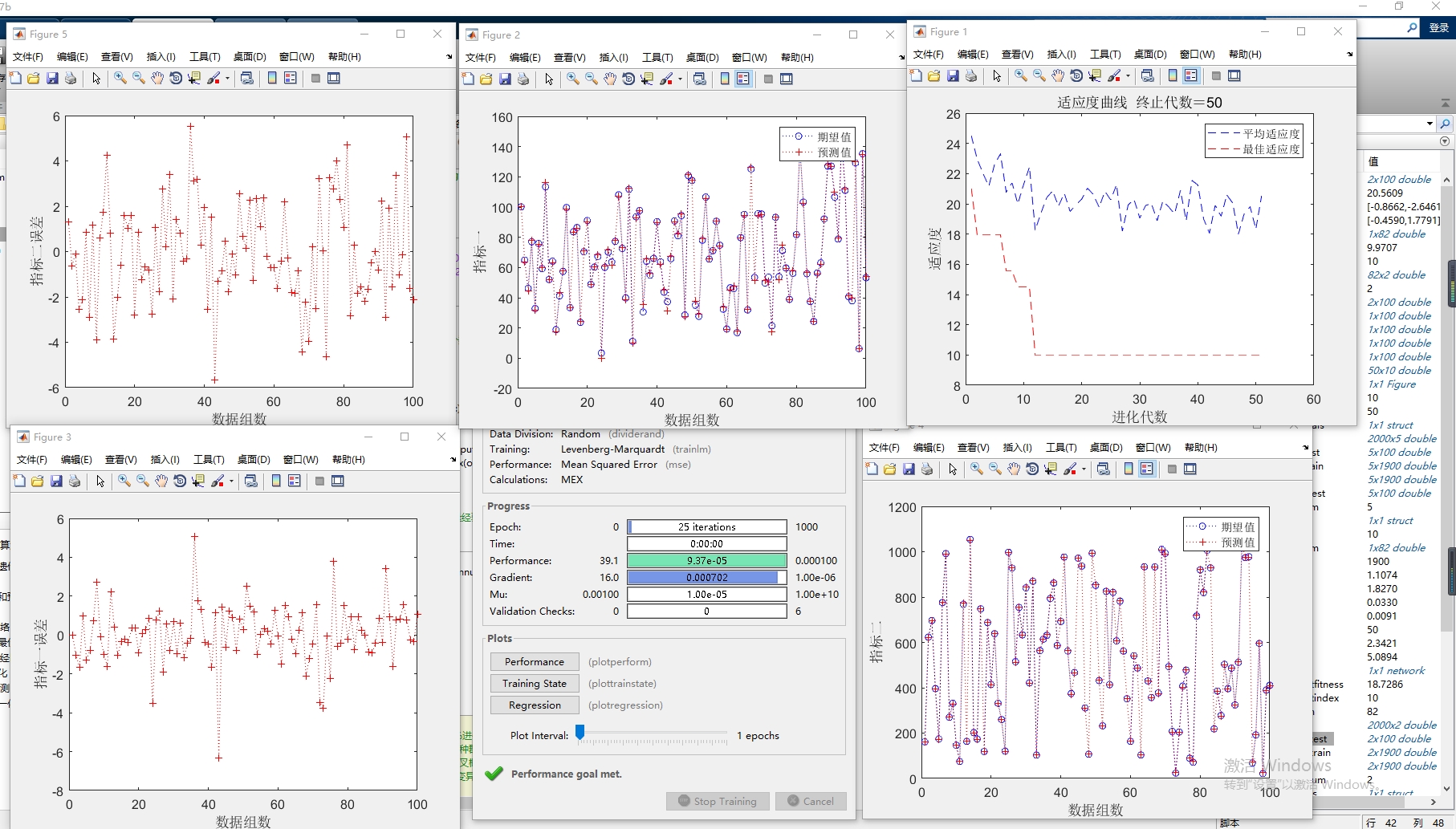
matlab的基于遗传算法优化bp神经网络多输入多输出预测模型,有代码和EXCEL数据参考,精度还可以,直接运行即可,换数据OK。这个程序是一个基于遗传算法优化的BP神经网络多输入两输出模型。下面我将对程序进行详细分析。首先,程序读取了一个名为“数据.xlsx”的Excel文件,其中包含了输入数据和输出数据。输入数据存储在名为“input”的矩阵中,输出数据存储在名为“output”的矩阵中。接下
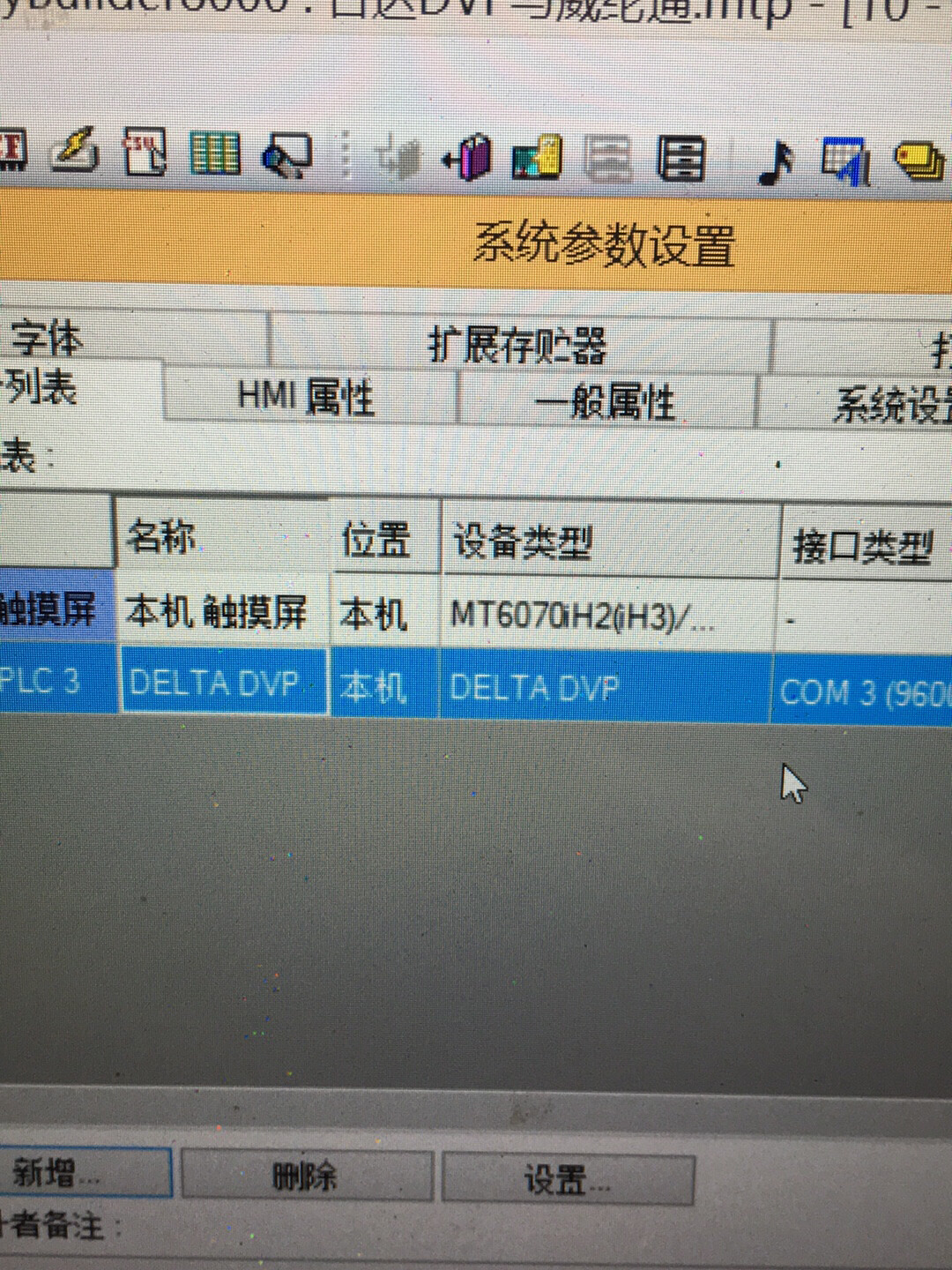
在自动化控制领域,不同设备间的通讯协同至关重要。本文将详细介绍如何实现台达DVP ES系列PLC与3台英威腾GD变频器的通讯,并通过昆仑通态和威纶通触摸屏实现频率设定、启停控制、实际频率读取及状态指示等功能,同时附上接线方式及相关设置。
这两年拿ADRC(自抗扰控制)搞PMSM伺服控制的案例越来越多,特别是三阶ADRC结构,实测抗负载扰动和参数摄动效果真挺惊艳。玩控制算法就像拼乐高,ADRC作框架,再融入滑模的抖振抑制、预测控制的优化思想,调参时能少掉几根头发。模型预测控制,滑模控制,自抗扰控制,广义预测控制,反步控制等各种控制算法任意排列组合都有。模型预测控制,滑模控制,自抗扰控制,广义预测控制,反步控制等各种控制算法任意排列组