- @xutSwIpZotzM
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
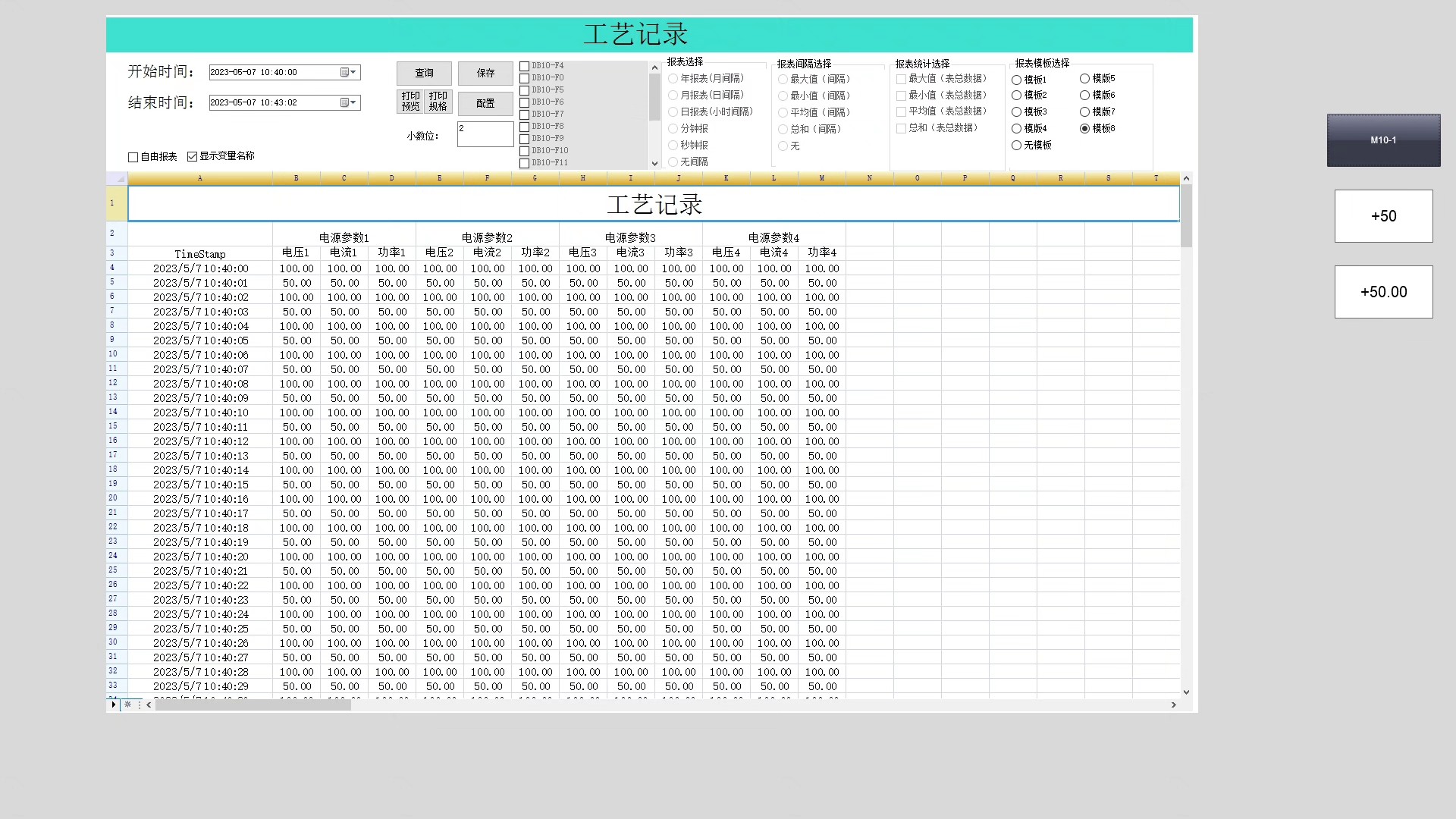
自定义模版功能就像是给你的报表披上了一件量身定制的外衣。在实际项目中,不同的用户可能对报表的样式有着不同的需求。比如说,有的喜欢简洁明了的表格形式,有的则偏好带有图表展示的数据汇总。通过WinCC高级报表的自定义模版,你可以轻松实现这些个性化需求。' 定义一个函数来设置报表标题样式titleObject.TextAlign = 2 '2表示居中对齐这段代码中,我们通过访问报表对象的特定区域(这里是
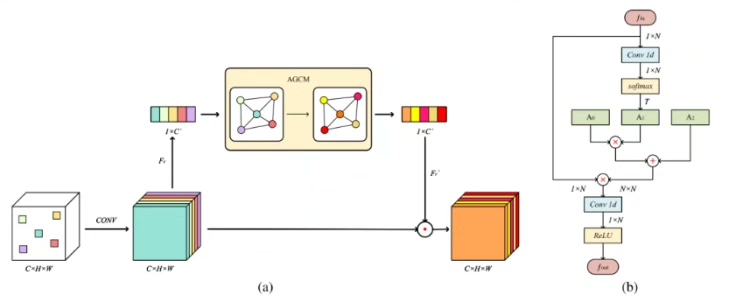
这种CNN+图注意力的组合拳,本质上是在空间特征和拓扑关系之间找平衡。既保留了CNN的局部感知优势,又通过图结构引入了物理约束,适合处理像轴承故障这种具有强空间相关性的问题。这里有个骚操作:把CNN输出的特征图展平后作为图节点的初始特征。注意GATConv里的heads参数实现了多头注意力,能让模型从不同子空间学习特征。今天咱们来聊点硬核的——如何把轴承振动信号玩出花,用CNN+图注意力机制搞点创
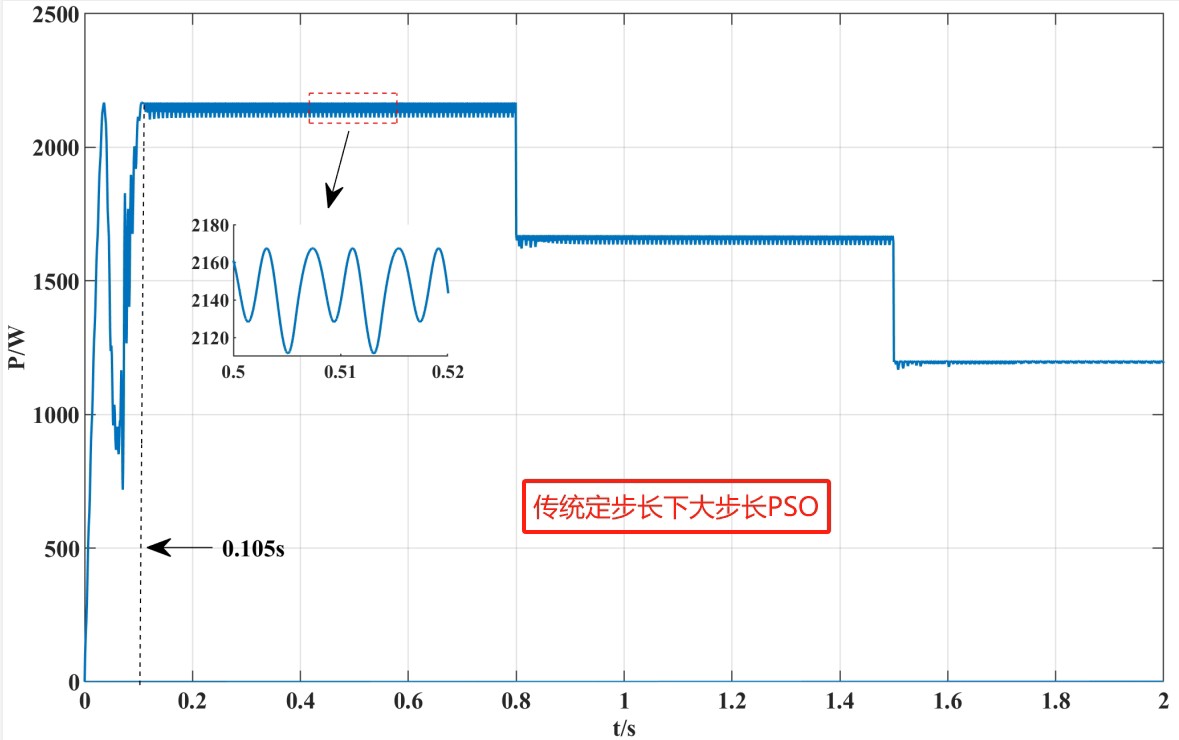
3]变步长扰动观察法:当实际电压与最大功率点电压差值超过25采用大步长来提升响应速度,当10<差值<25,采用设定的系数得到的步长,当差值<10的时候,改用小步长减小震荡,以改善因震荡过大造成的功率损耗。[3]变步长扰动观察法:当实际电压与最大功率点电压差值超过25采用大步长来提升响应速度,当10<差值<25,采用设定的系数得到的步长,当差值<10的时候,改用小步长减小震荡,以改善因震荡过大造成的
Qt+OpenCV图像视觉框架全套源码上位机源码工具可扩展。除了opencv和相机sdk的dll,其它所有算法均无封装,可以根据自己需要补充自己的工具。基于 Qt5.14.2 + VS2019 + OpenCV 开发实现,支持多相机多线程,每个工具都是单独的 DLL,主程序通过公用的接口访问以及加载各个工具。包含涉及图像算法的工具、 逻辑工具、通讯工具和系统工具等工具。最近捣鼓了一个超有趣的项目—
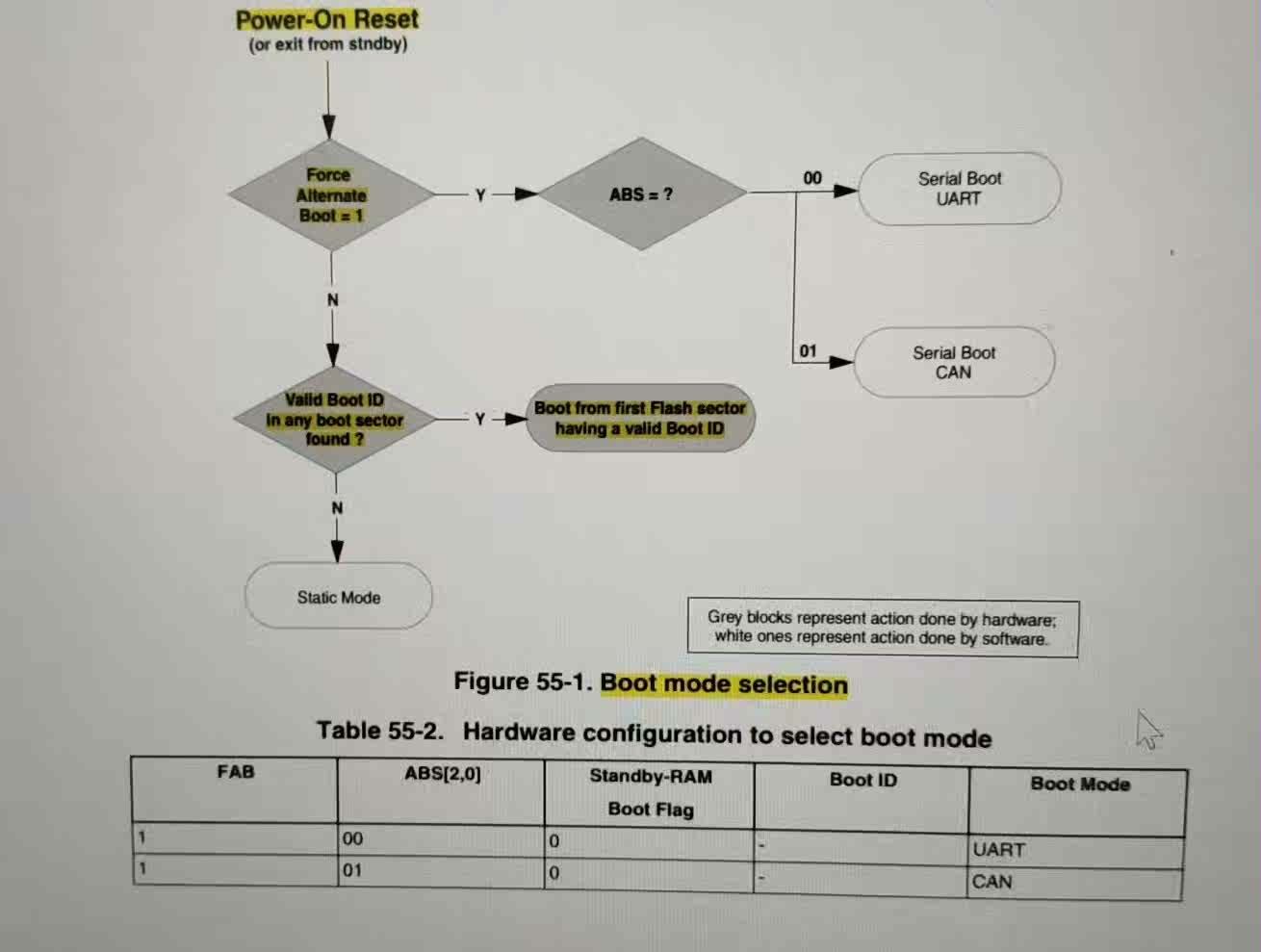
汽车ECU BootLoader开发基于CAN总线通信MPC57XX系列MCU bootloader开发文档54页在汽车电子领域,ECU(Electronic Control Unit)的重要性不言而喻,而BootLoader则是ECU中关键的一环。今天咱们就来聊聊基于CAN总线通信,利用MPC57XX系列MCU进行BootLoader开发的那些事儿。
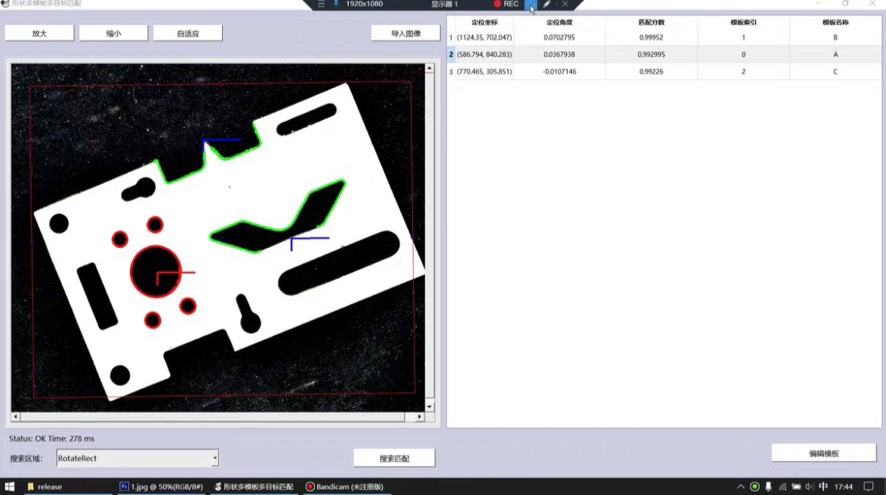
C++ OpenCV模板匹配框架源码,包括有方向矩形ROI、圆形ROI、环形ROI创建模板,画笔可以对模板区域涂抹实现屏蔽或选取,c++ opencv开发的基于形状多模板多目标的模板匹配源码,可实现定位,计数,分类等等,定位精度可达亚像素级别,运行速度采用并行加速。最后吐槽下OpenCV的matchTemplate函数,居然不支持旋转和缩放模板的匹配,害得要自己实现这些功能。比较实用的功能是模板库
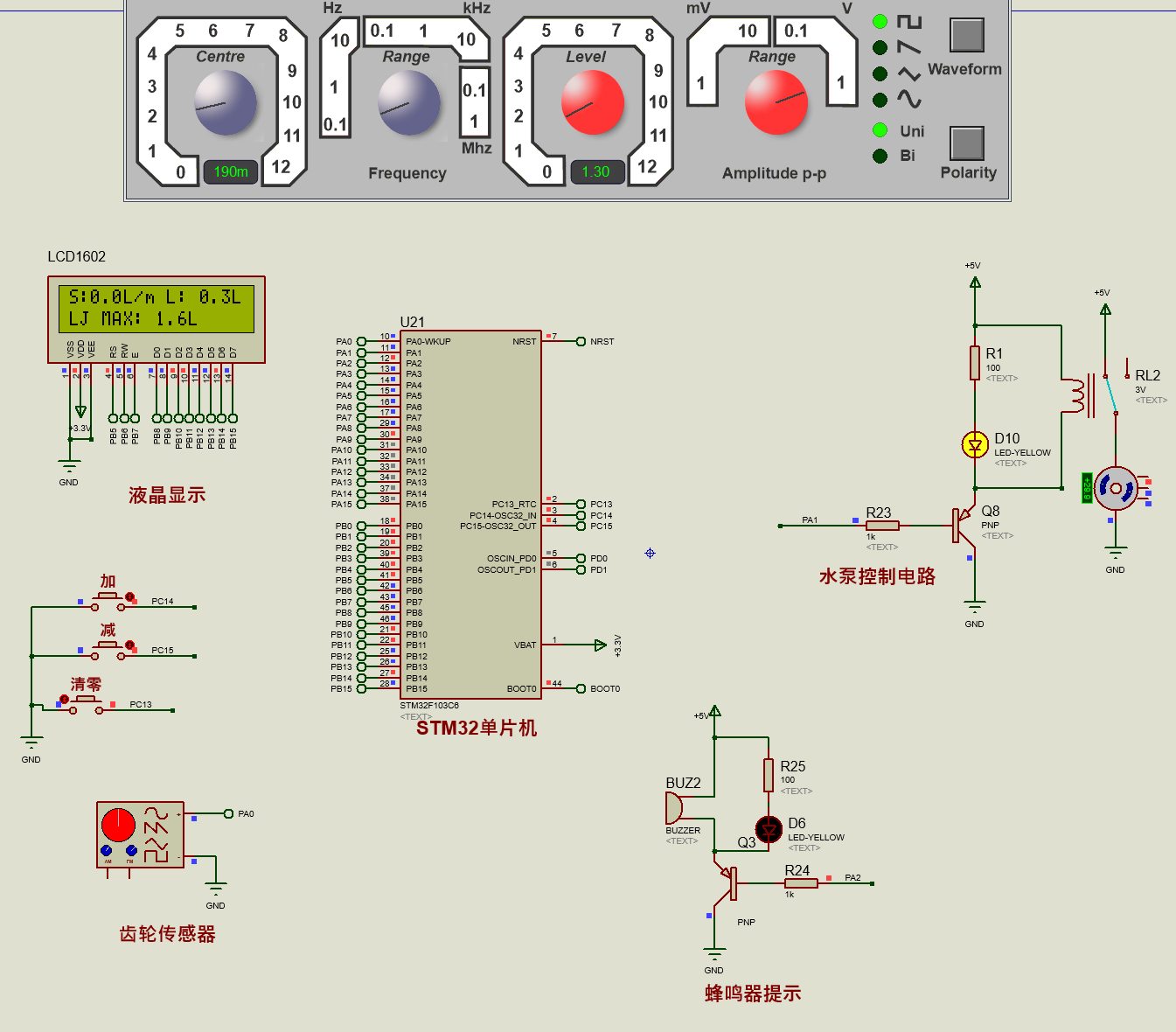
基于STM32的流量计智能流速流量监测、水泵报警系统(泵启动1100027-基于STM32的流量计智能流速流量监测、水泵报警系统(泵启动、阈值设置、LCD1602、超阈值报警、proteus)功能描述:基于STM32F103C8单片机实现的智能流速、流量,流量计设计实现的功能是通过信号发生器模拟齿轮传感器,检测流量的大小,同时计算流过液体的总容量可以设置最大流过的总容量,当超过设定值后通过蜂鸣器与
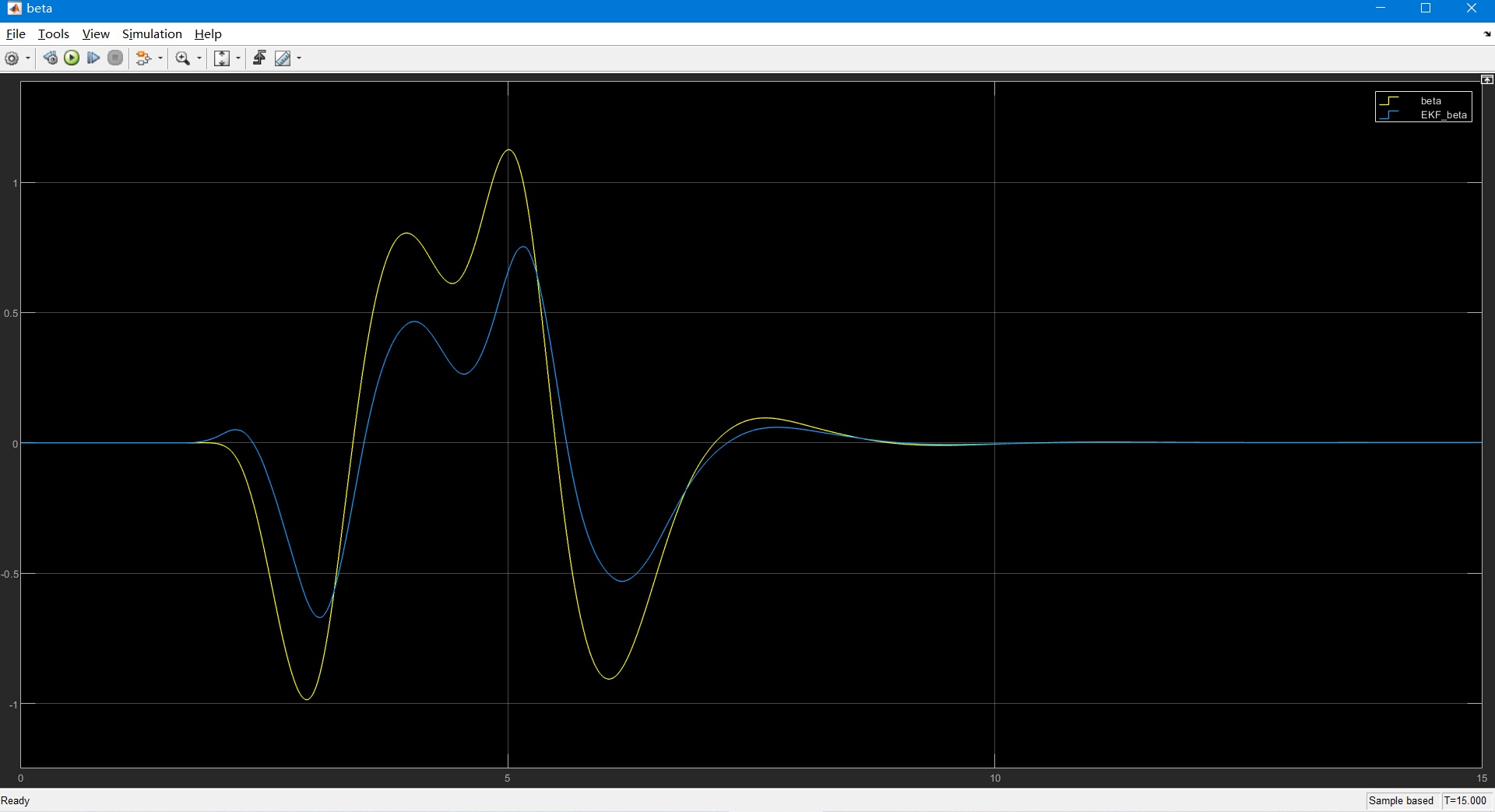
清晨六点半的实验室键盘声格外清脆,我盯着屏幕里那辆在CarSim里蛇形走位的虚拟高尔夫,手边的拿铁已经凉透。搞车辆状态估计的兄弟们都懂,质心侧偏角这个磨人的小妖精,就像暗恋对象的心思——你知道它重要,但死活测不准。看到那个0.7和0.3没?matlab和carsim联合仿真,基于三自由度车辆模型,搭建ekf或者ukf与积分法融合的用于测量质心侧偏角,纵向速度,横摆角速度。matlab和carsim
包括不同网格尺寸(4x4、5x5、6x6、7x7)和不同标记数量的组合。每个字典都经过优化设计,确保标记间的汉明距离最大化,减少误识别概率。
CANopen协议代码,学习资料,包含CANfestival官方代码框架,官方字典生成工具,可自主设定心跳,pdo,sdo等内容参数,并包含已经移植完成的且带有详细注释的一个主站程序两个从站能正常通信,文档中还有大量本人学习CANopen时从csdn,百度文库等平台下载的参考文档与本人学习完后写的总结心得。本CANopen网络采用CANfestival框架,网络由一个带有STM32F765VGT6