- @qq_61752687
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
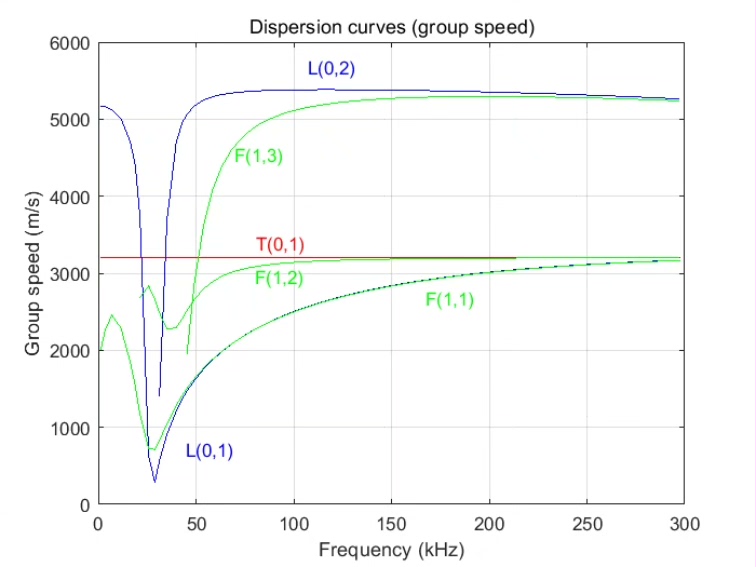
完整代码约120行(包含异常值过滤和曲线平滑处理),需要调试的可以直接取核心片段嵌入自己的框架。实测在i7-11800H笔记本上运行完整流程约15分钟出图,内存占用峰值8GB左右。直接进入正题,咱们用COMSOL建模仿真结合MATLAB后处理,手把手实现Lamb波频散曲线绘制。先看最终效果:横轴频率厚度积,纵轴相速度/群速度,多模态曲线清晰可见。comsol和matlab联合仿真 MATLAB 编
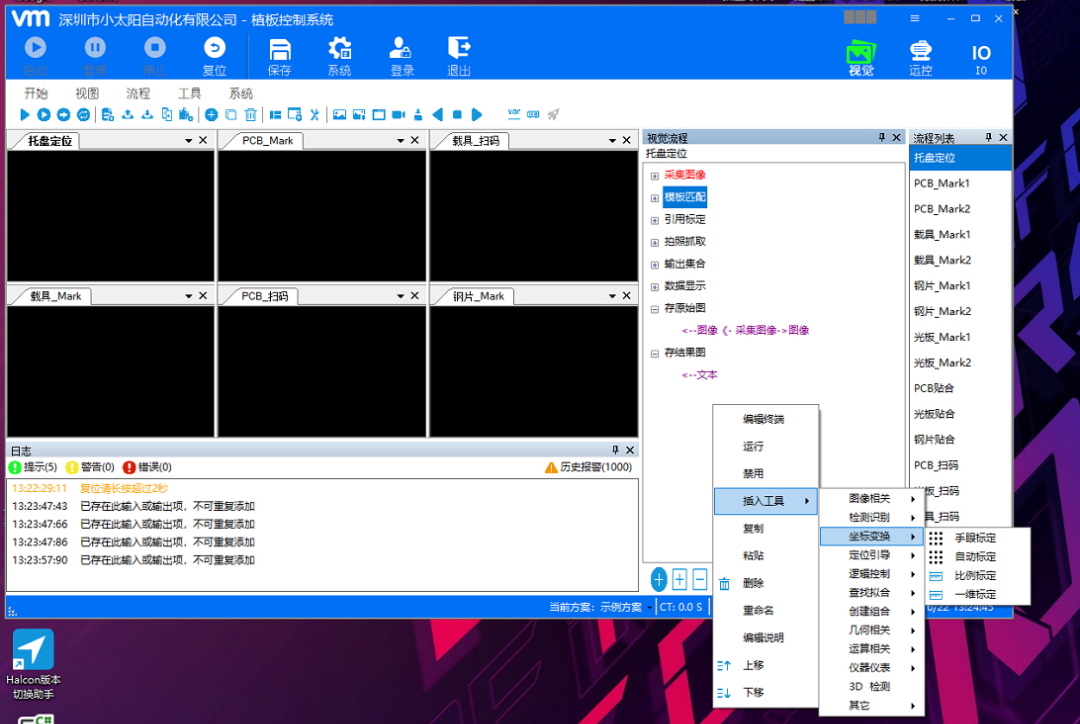
今天聊的这个框架直接把Halcon封装成拖拉拽的积木块,连halcon语法都不用背就能搞定位引导、OCR识别这些硬核功能,还能和PLC对线。说实话,这个框架最狠的不是技术实现,而是那些藏在工具箱里的实用小工具。拖拽式编程,无halcon基础也能上手,匹配,测量,条码识别,ocr,定位引导,对位等,支持plc通讯,集成主流相机sdk,系统集成.其实背后偷偷做了金字塔分层搜索,运行时占用的内存比原生的
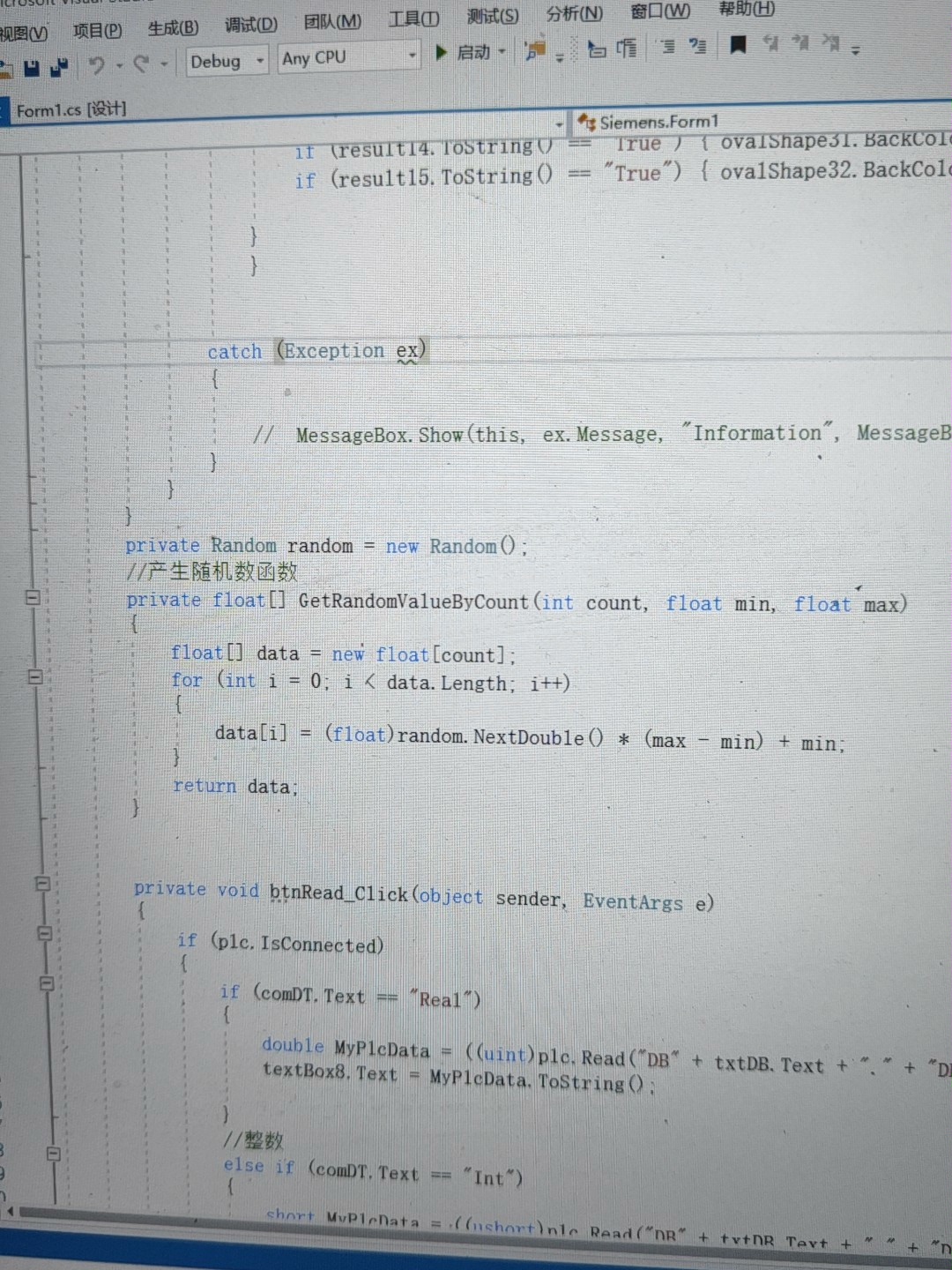
西门子S7系列PLC C#上位机通信系统是基于Visual Studio 2017开发环境,采用C#语言构建的Windows窗体应用程序。该系统依托S7.Net通信库与HslControls控件库,实现了对西门子S7全系列PLC(涵盖S7-200、S7-200 SMART、S7-300、S7-400、S7-1200、S7-1500)的通信管理。系统核心功能包括PLC连接配置、实时数据监控、寄存器读
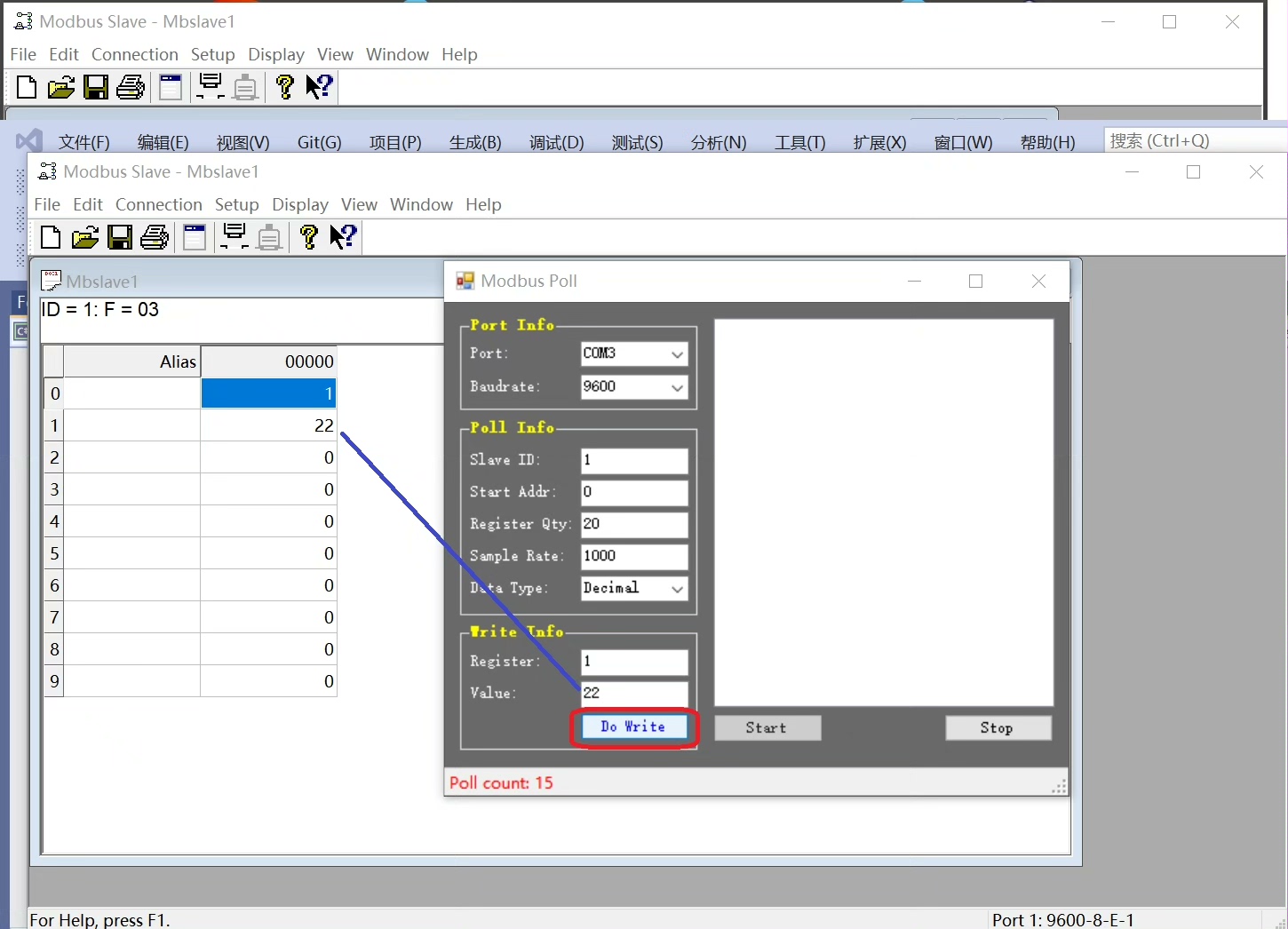
这玩意当年可是跟着工控设备跑过煤矿、混过钢厂、甚至还在海上石油平台飘过,几百个项目现场验证过的稳定性真不是吹的。遇到问题翻翻Issues里,可能有你想要的答案——十年前的老哥已经踩过坑了。这招"收到数据就开定时器,超时处理"的套路,当年可是干翻了无数干扰现场。当年有个现场小哥拿着这个demo,两天就对接上了西门子S7-200,后来还成了他们公司的标准对接方案。本项目为ModbusRTU的软件开发源
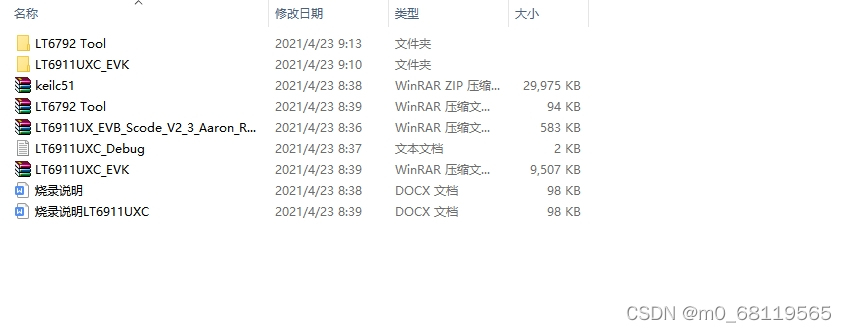
LT6911UXC 是龙讯(Lontium)推出的一款高性能视频转换芯片,支持 4K60Hz 高清视频输入,可实现 HDMI 信号到 MIPI DSI/CSI 信号的转换,广泛对接海思 3519A、3559A 等主控芯片,适用于高清显示终端、视频采集设备等场景。本文基于 LT6911UXEVBScodeV23 版本源码,从代码结构、核心功能模块、数据流程及关键技术特性等方面进行详细解析,为开发者提
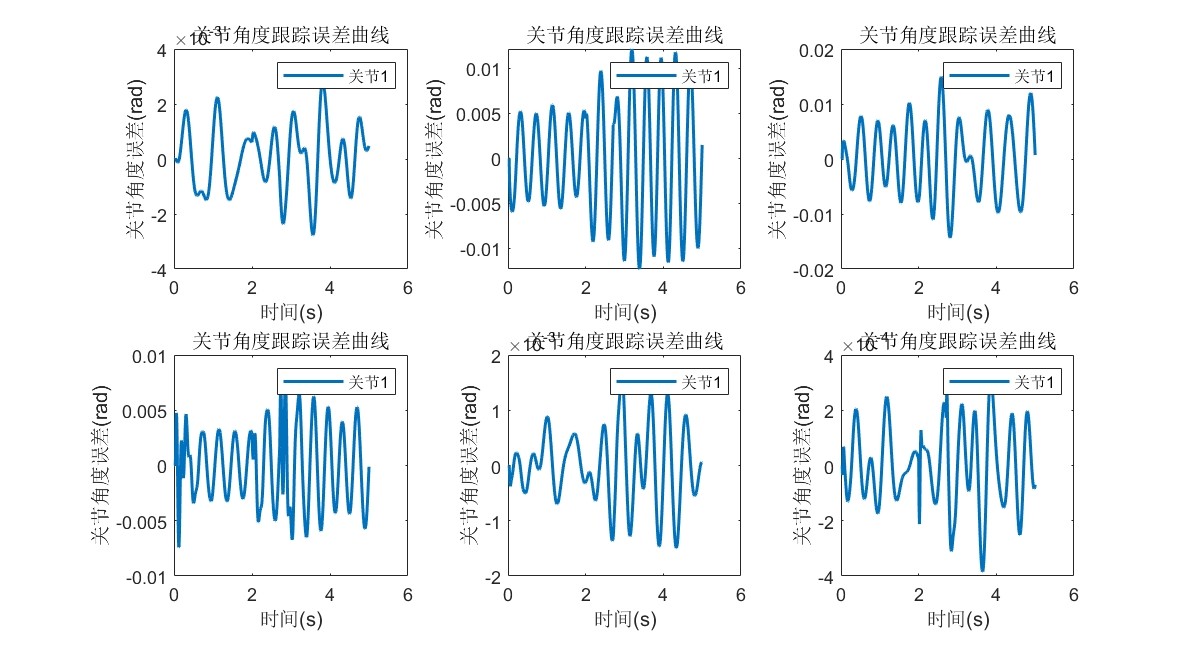
模型,基于动力学的六自由度机器人阻抗恒力跟踪控制实现,MATLAB代码,可完美运行供研究学习使用,附学习说明文档,零基础勿MATLAB,机器人动力学,恒力控制,六自由度在机器人研究领域,六自由度机器人的控制是一个热门话题,特别是涉及到恒力跟踪控制,对于很多实际应用场景如打磨、装配等至关重要。今天咱们就来聊聊基于动力学的六自由度机器人阻抗恒力跟踪控制在MATLAB中的实现过程。
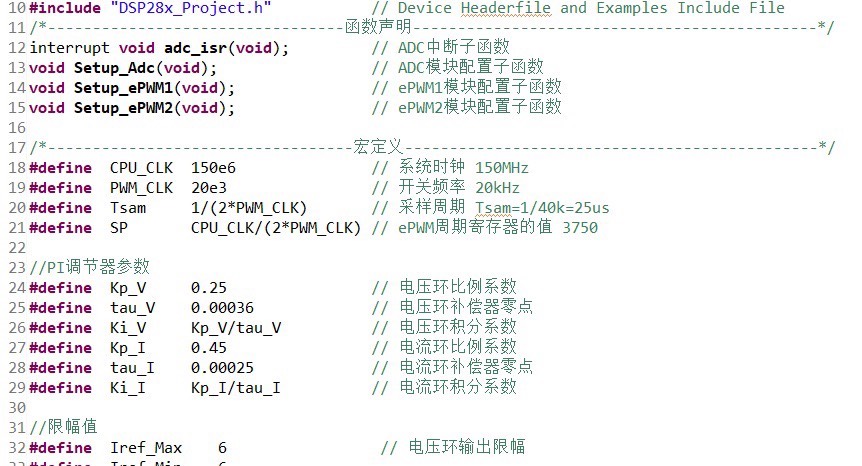
搞电力电子的老司机们对BUCK电路都不陌生,但要把双闭环PI控制塞进DSP里跑起来,这事儿还真得跟TMS320F28335的寄存器大战三百回合。实在搞不定的时候,把PWM占空比直接映射到键盘加减键,用串口命令手动调整,比死磕MATLAB仿真更直接。调试时最实用的技巧:把关键变量映射到GPIO,用示波器同时抓PWM波形和IO口电平,比看CCS的Graph工具直观得多。注意那个>>4操作可不是随便写的
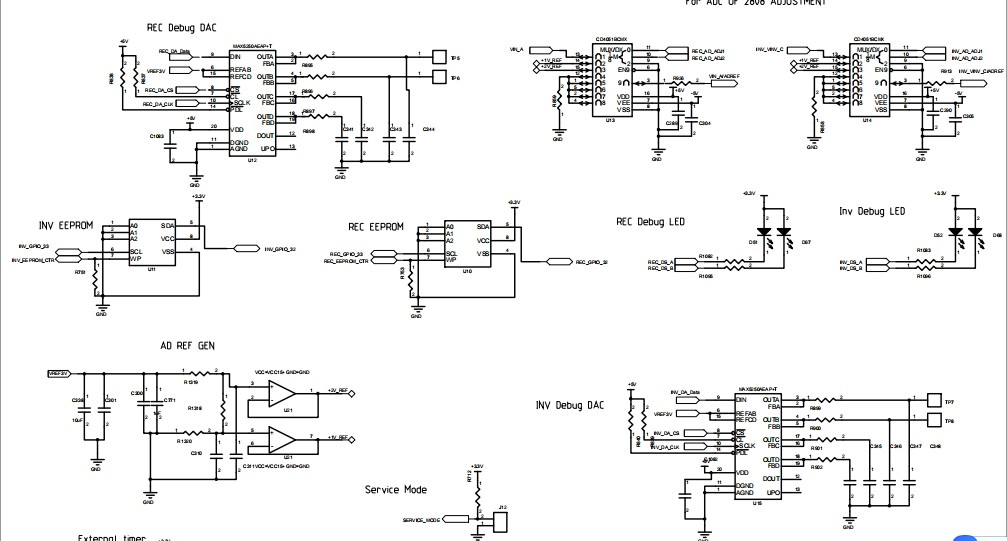
电源板的24V转换方案选了交错并联拓扑,原理图上的相位差设置精准到15度,有效降低输入纹波。总的来说,这套方案在效率和可靠性之间找到了不错平衡点,特别是热设计部分——散热器斜齿结构配合风速PID算法,温升控制比常规方案低7℃左右。有意思的是PCB布局——IGBT驱动信号走线特意做了长度匹配,实测信号延迟差异不超过3ns,这比单纯依靠软件死区更靠谱。原理图为pdf,pcb为AD文件,有PCB元件库,
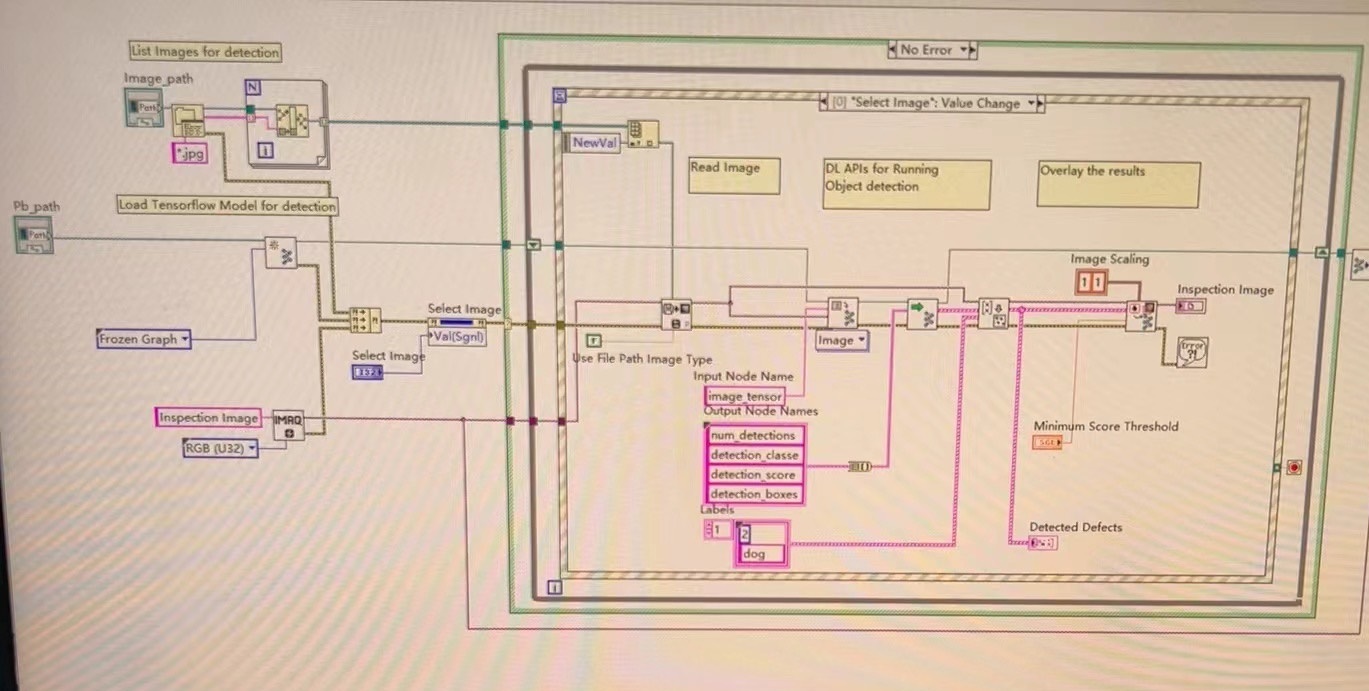
随着人工智能技术的快速发展,深度学习已经成为众多领域研究的热点。LabVIEW作为一种强大的工程开发环境,其与TensorFlow的结合使用,能够更高效地实现深度学习模型的开发与应用。本教程将介绍如何使用LabVIEW调用TensorFlow进行深度学习。本教程介绍了如何使用LabVIEW调用TensorFlow进行深度学习。通过本教程的学习,您将能够掌握LabVIEW与TensorFlow的结合
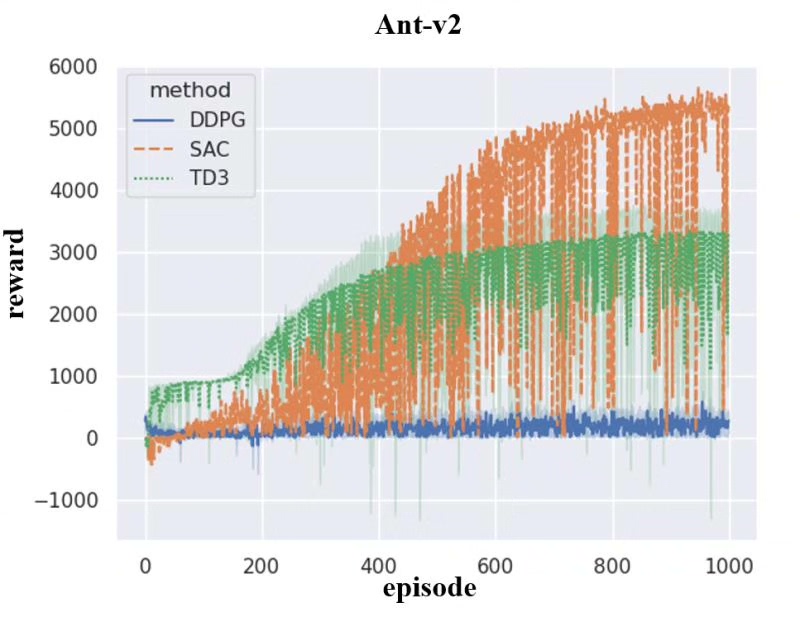
本框架面向机器人连续控制研究场景,基于 MuJoCo 的 HalfCheetah-v2 环境,提供四种主流深度强化学习算法(A3C、DDPG、SAC、TD3)的完整训练-测试-可视化闭环。开发者可在零侵入的前提下,一键切换算法、批量跑实验、自动输出曲线与统计报表,满足论文复现、算法对比、工程落地三类需求。无论是做学术研究还是工程交付,开发者只需聚焦算法核心逻辑,其余训练、评测、对比、可视化均可一键