- @zzdYEjLL
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
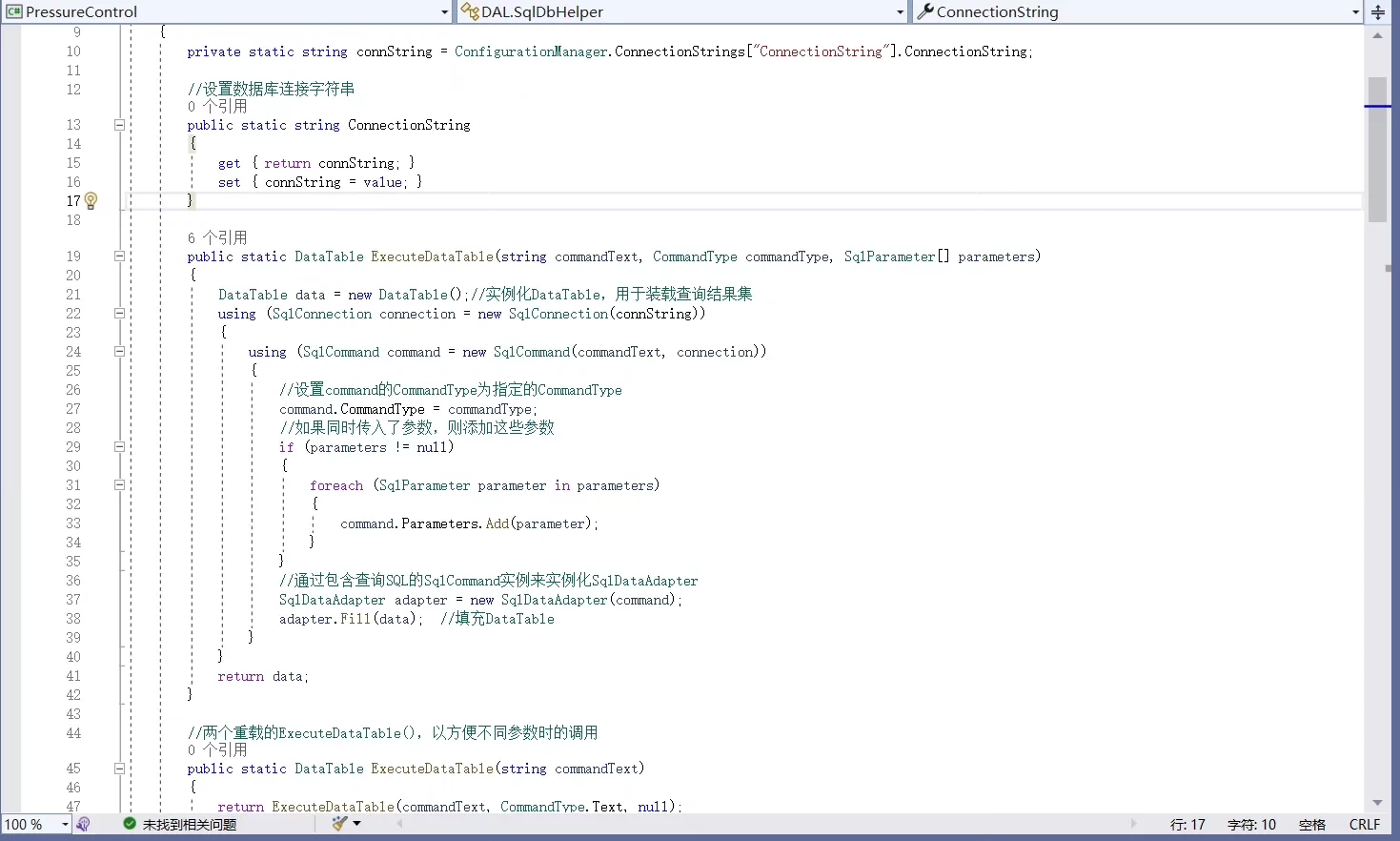
当然不是,你得根据实际设备协议改数据解析部分。比如设备返回的数据可能是十六进制,那就要用来转。分层架构:解耦UI和业务逻辑,换硬件不用改Form异常处理try-catch和状态检查,程序不容易崩界面美化:用第三方库+合理布局,至少不像“计算器界面”了如果有同学想扩展,比如加个数据存到Excel的功能,直接写个类,继承接口,在MainForm里调用就行,扩展性拉满~上位机C#机框架源码,详细清晰可见
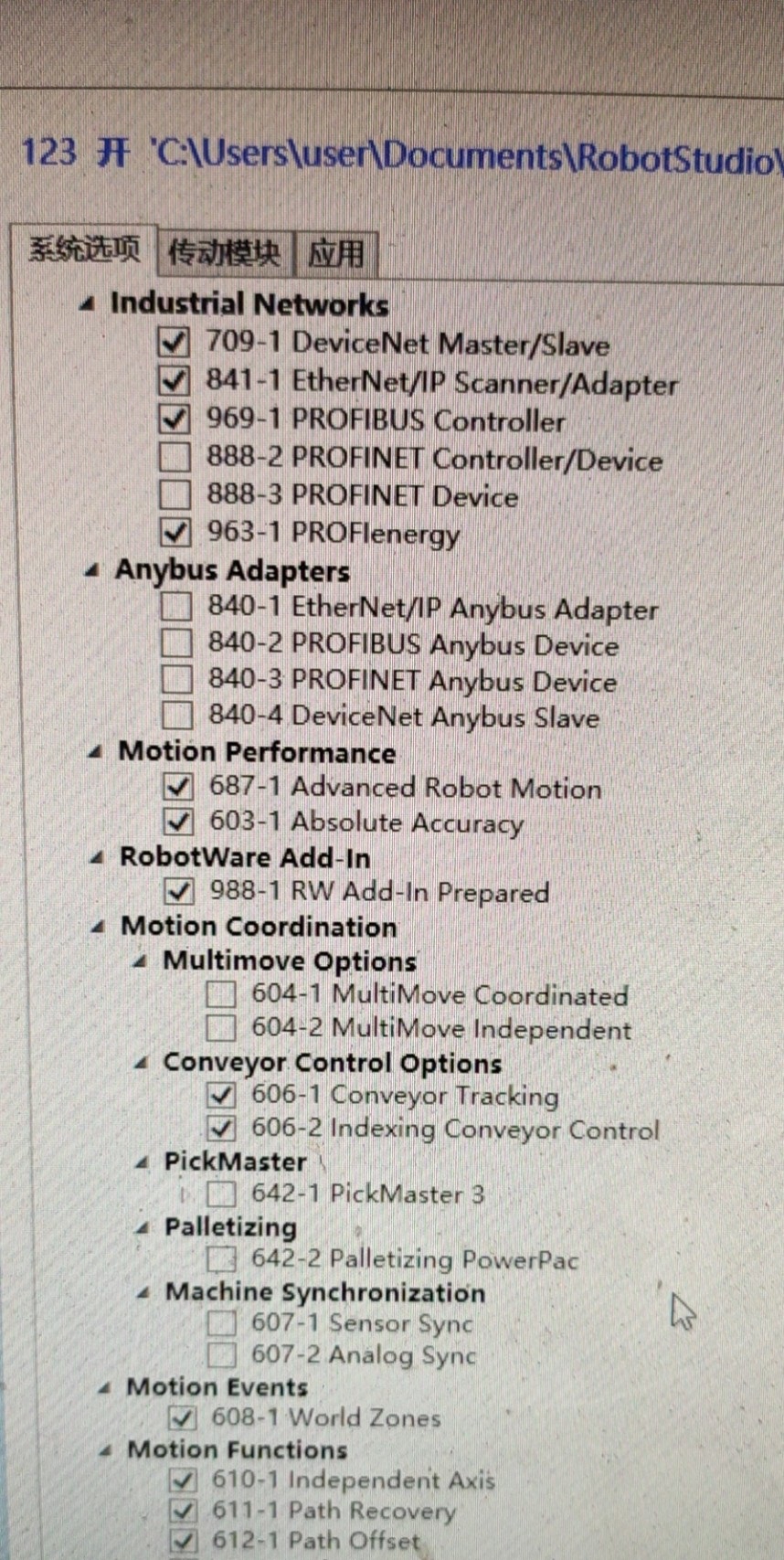
重点来了,系统时间必须和密钥有效期匹配,我上次就栽在这儿,机器时间调回2018年才读出来,你懂的。搞过工业机器人的兄弟应该都懂,ABB的选项包就跟游戏里的DLC似的,没解锁的话高级功能全灰。今天咱们唠点硬核的,手把手教你三种激活大法——物理密钥、虚拟机巧、还有直接写密钥的骚操作。ABB机器人选项包,密钥,三种方法,真实、虚拟、密钥三种方法,有教程、有软件、也有密钥。ABB机器人选项包,密钥,三种方
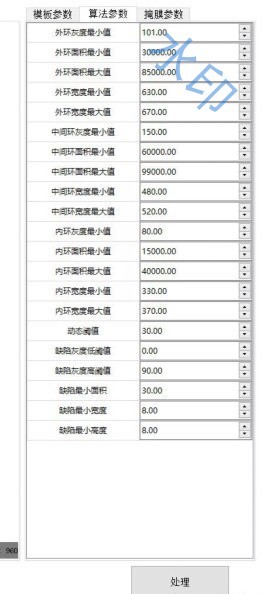
这可是ABB机器人仿真与编程的利器,通过Rapid编程和smart组件来完成整个仿真过程。想象一下,在虚拟环境里就能模拟机器人实际工作场景,提前测试各种方案,避免了实际操作中的不少麻烦。:作为C#开发的强大平台,在这里我们集成Halcon代码,还会利用PC SDK进行二次开发。C#语言简洁高效,与Halcon结合能快速实现各种视觉算法的逻辑控制。Halcon视觉算法:图像处理和机器视觉领域的佼佼者
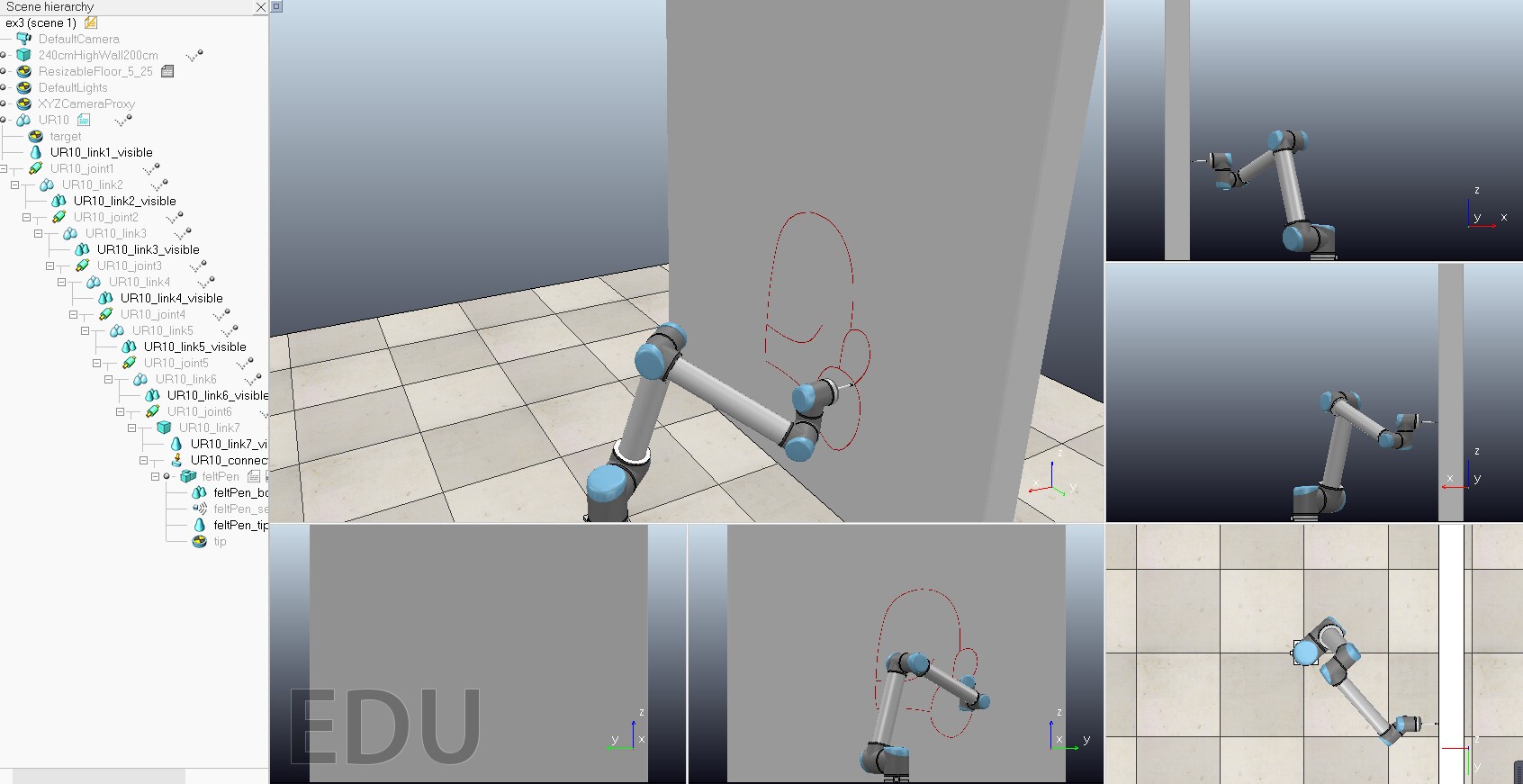
本项目基于 V-REP(现称 CoppeliaSim)机器人仿真平台,结合 MATLAB 实现机械臂的轨迹规划与控制。项目包含两个主要实验:机械臂码垛任务和墙面绘图任务,展示了机器人轨迹规划的核心算法与实际应用。该项目成功展示了基于 V-REP 和 MATLAB 的机器人轨迹控制完整解决方案,通过精心设计的轨迹规划算法和运动控制策略,实现了机械臂在三维空间中的精确、平滑运动。代码结构清晰,算法可靠
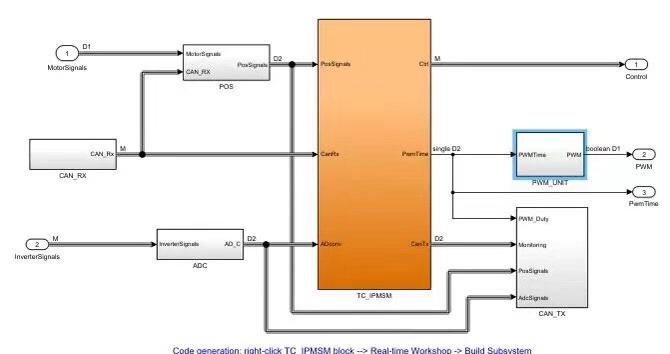
博世汽车电驱仿真模型,同步电机和异步电机模型,相电流完美波形 博世汽车电驱仿真模型,同步电机和异步电机模型,相电流完美波形,自动计算弱磁模型调用各种脚本进行foc控制,正反转切换电流无波动在汽车电驱领域,博世的仿真模型一直是众多工程师关注的焦点。今天咱们就来深入探讨一下博世汽车电驱仿真模型里的同步电机和异步电机模型,以及与之紧密相关的相电流完美波形、弱磁模型计算和 FOC 控制等酷炫的技术。
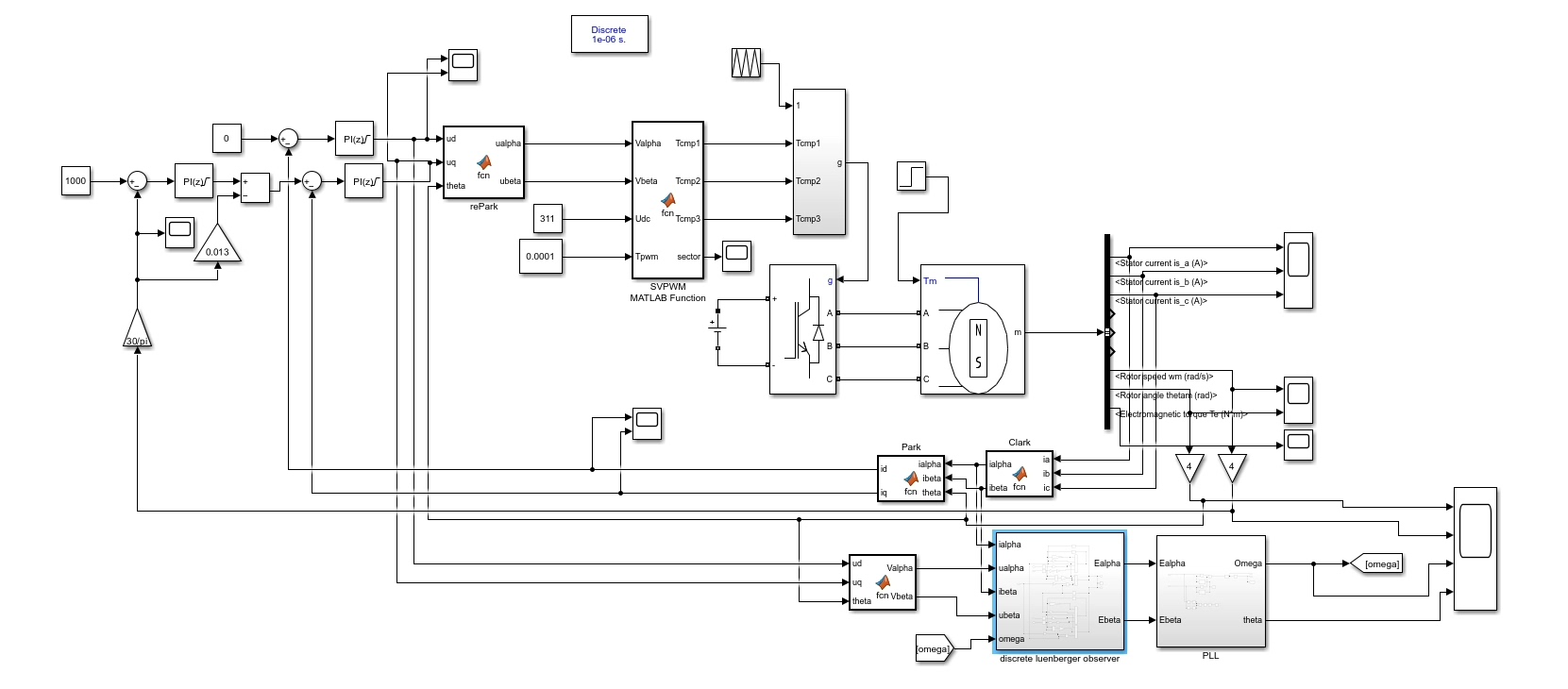
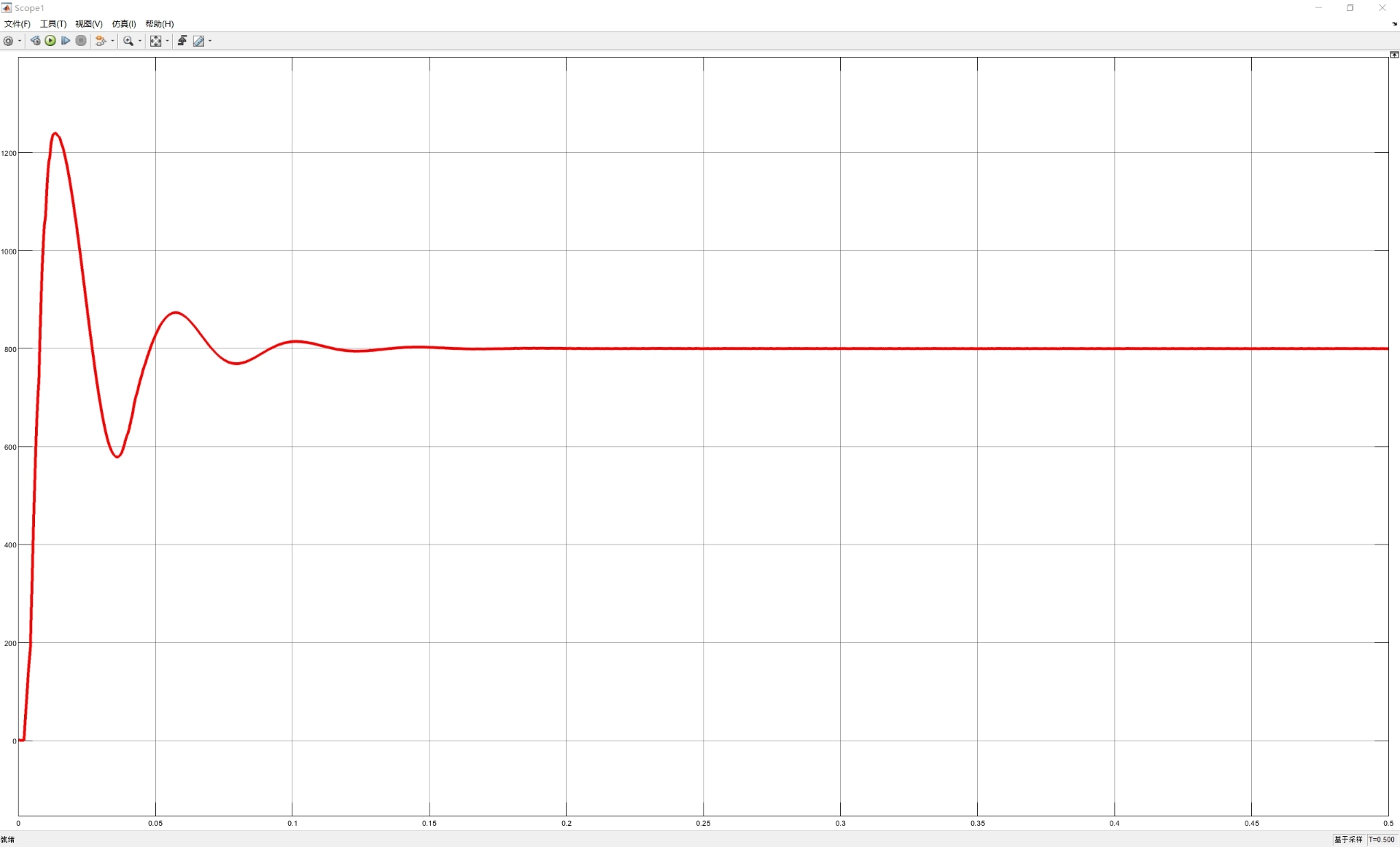
龙伯格 luenberger观测器,永磁同步电机无位置传感器控制,simulink模型,使用PLL锁定位置。在永磁同步电机(PMSM)的控制领域,无位置传感器控制技术近年来备受关注。这种技术能够在不依赖物理位置传感器的情况下,精确获取电机转子的位置和速度信息,从而降低系统成本、提高可靠性。今天咱就聊聊基于龙伯格(Luenberger)观测器并利用PLL(锁相环)锁定位置实现PMSM无位置传感器控制
路径可视化后能看到,算法聪明地把时间窗临近的客户安排在同一条线路,就像玩拼图时把形状匹配的碎片凑在一起。1、以带时间窗物流路径问题(VRPTW)相关理论作为基础,结合物流运输中心条件以及客户点需求情况等,将时间窗与车辆载重量作为主要约束条件,寻求总成本的最小值;1、以带时间窗物流路径问题(VRPTW)相关理论作为基础,结合物流运输中心条件以及客户点需求情况等,将时间窗与车辆载重量作为主要约束条件,

最近在搞三相桥式PWM整流电路仿真,发现2021a的Simulink用起来还挺顺手。咱们今天来聊聊怎么用dq解耦+双环PI玩转这个整流系统,重点说几个实操时容易踩坑的地方。之前翻车过好几次才摸清这个规律。主电路部分直接上三相全控桥结构,重点在于LCL滤波器的参数匹配。采用SPWM调制,输入前加设LCL滤波器,可以得到整流后直流电压波形,波形质量较好。采用SPWM调制,输入前加设LCL滤波器,可以得
别被教科书唬住,Simulink的PID模块直接拖出来,参数整定界面堪比美颜相机的拉杆:Proportional调响应速度,Integral消静差,Derivative防过冲。仿真时故意把tau设大,方向盘回正就跟树懒似的慢动作,调小后又像打了鸡血疯狂回弹,找到平衡点得靠多喝几杯咖啡熬夜调参。J是转动惯量,B阻尼系数,K刚度系数。EPS模型,包括PID控制算法,传递函数回正控制,有完整的模型公式搭
VS2015:作为微软强大的集成开发环境,为C++代码的编写、调试提供了丰富的工具和友好的界面。Qt 5.8:一个跨平台的C++应用程序开发框架,在图形界面开发方面表现出色,能够轻松创建美观且交互性良好的用户界面。Halcon:这是一款功能强大的机器视觉库,提供了大量用于图像采集、处理、分析和识别的函数与算法。