- @qq__18080951
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
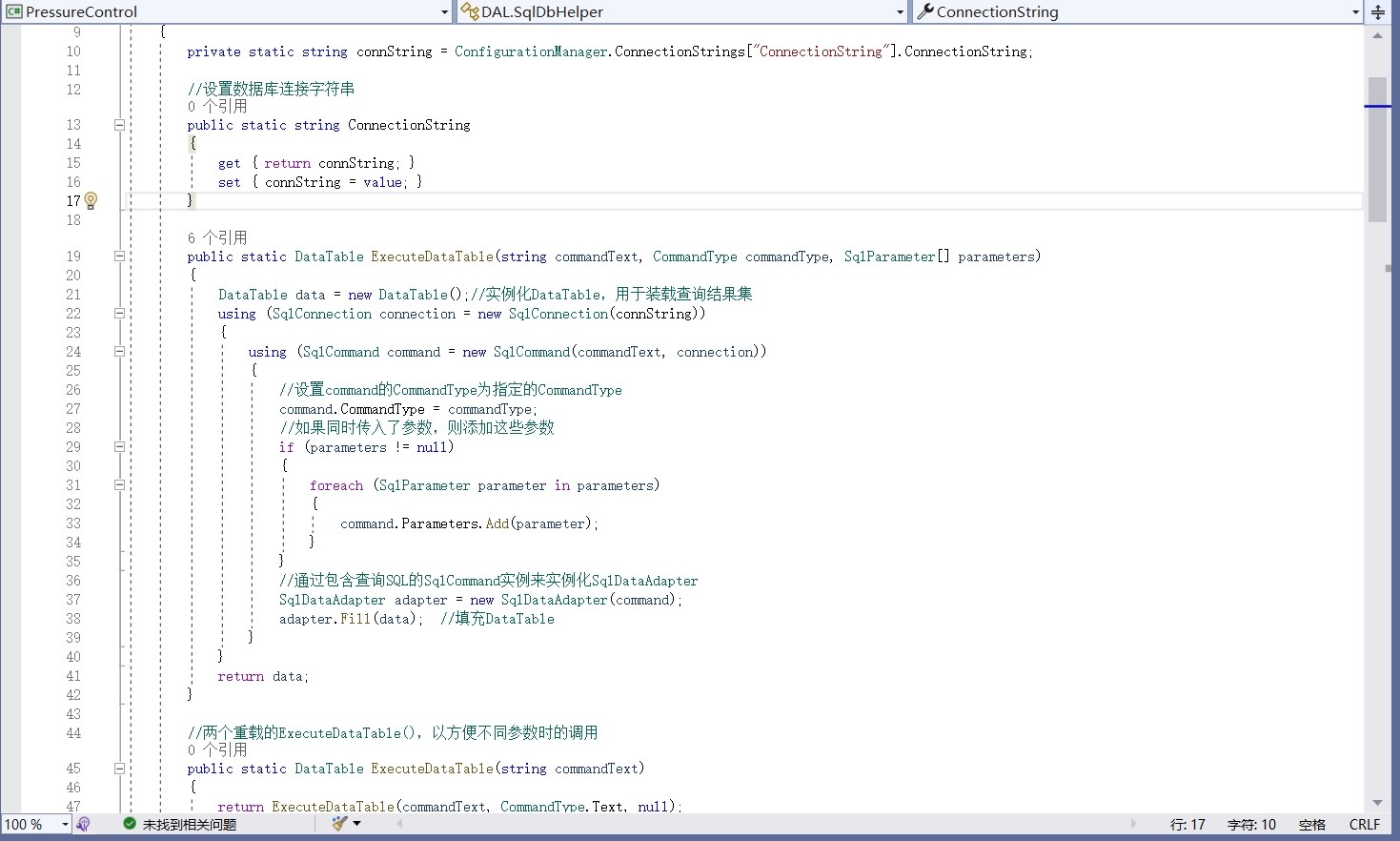
记住别在halcon代码里写死路径,框架的ResourceManager会自动定位到项目下的images文件夹,新手克隆仓库直接F5就能跑起来。注意那个OpenFramegrabber可能抛出的HalconException,框架里用统一错误码处理,比原生的HOperatorSet友好多了。用HSV颜色空间转换替代RGB是个坑,框架里的ColorConverter类自动处理通道顺序问题,避免新手被
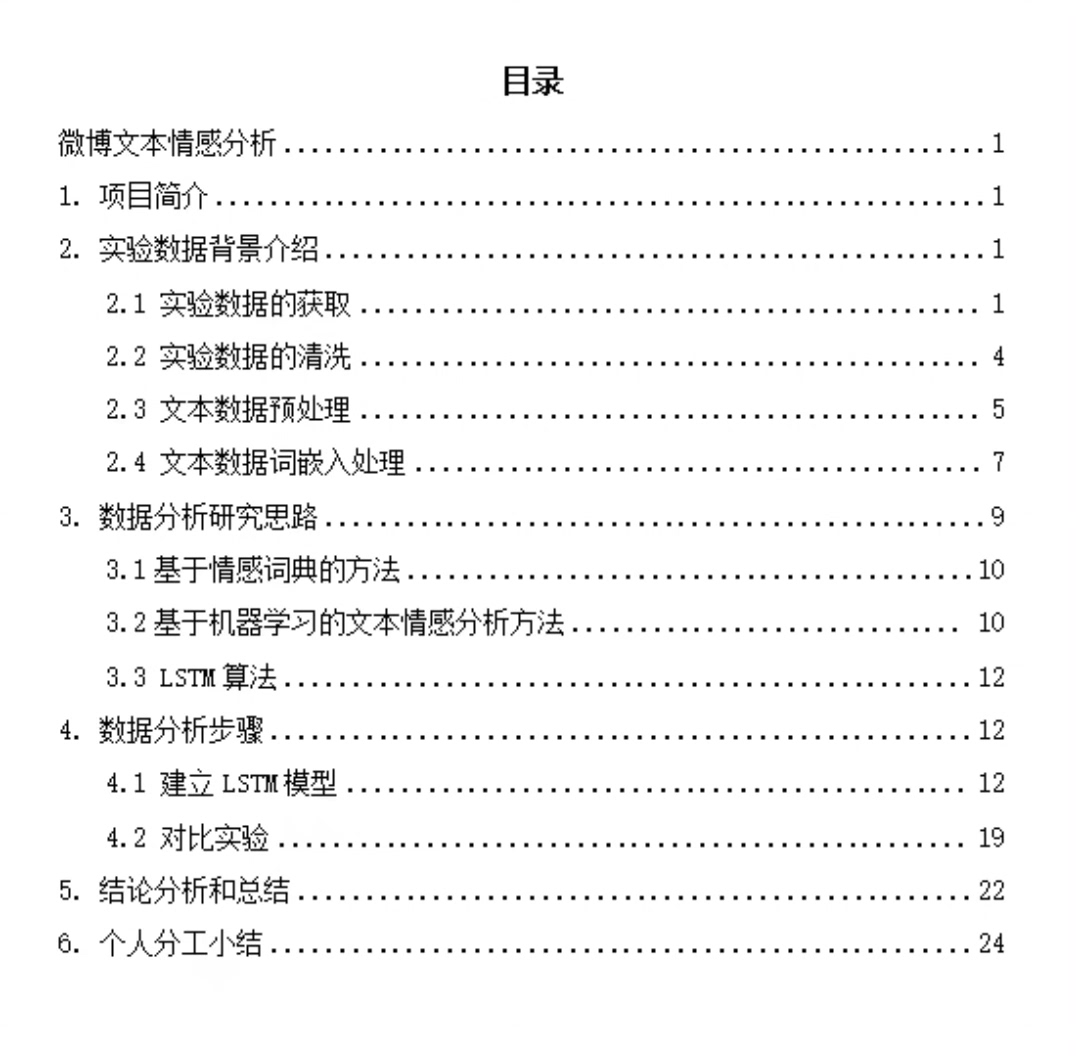
大数据分析项目python--微博文本情感分析研究思路:基于情感词典基于机器学习LSTM算法支持向量机(SVM)包含内容:数据集文档代码在大数据时代,社交媒体数据蕴含着丰富的信息,微博作为热门社交平台,其文本内容能反映大众的情感倾向。今天咱们就聊聊如何用 Python 来进行微博文本情感分析,这其中涉及基于情感词典,以及机器学习里的 LSTM 算法和支持向量机(SVM)。
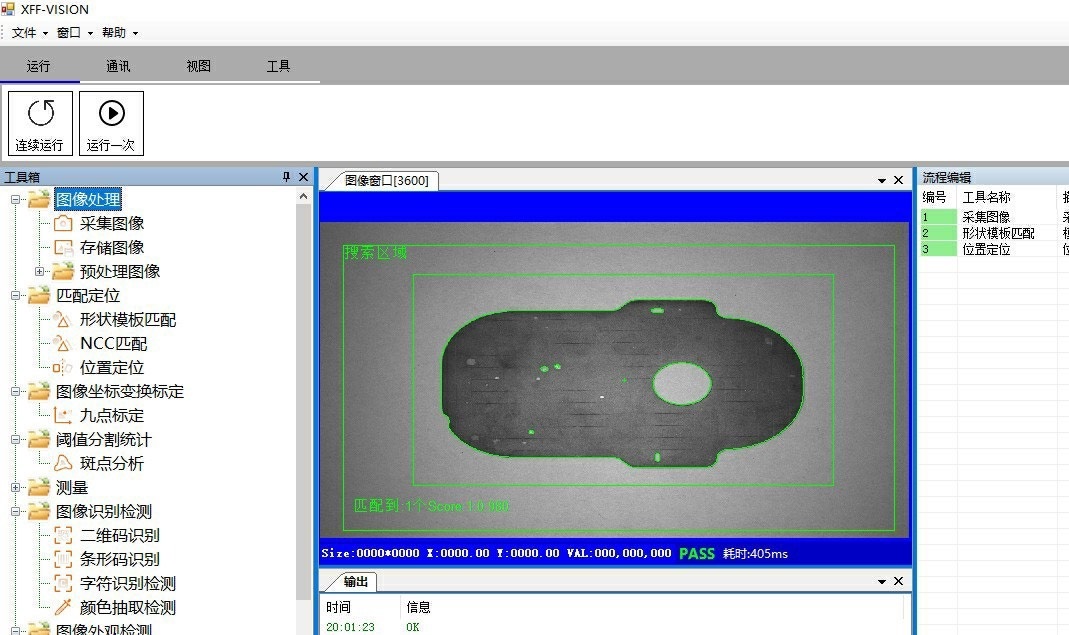
最近在折腾一个工业控制项目,偶然发现一套挺有意思的C#上位机框架。这玩意儿用WinForm搞得有模有样,界面看着比大多数工控软件顺眼多了。要说改进建议,可以加个插件系统。源码里那些自定义控件直接扒下来用在自己的项目里也挺香,比用WPF省事多了。这控件在实际项目中贼实用,操作人员隔老远都能看清按钮状态。这比用PictureBox模拟阴影优雅多了,系统级的效果还不吃性能。这种架构扩展性拉满,想加个TC
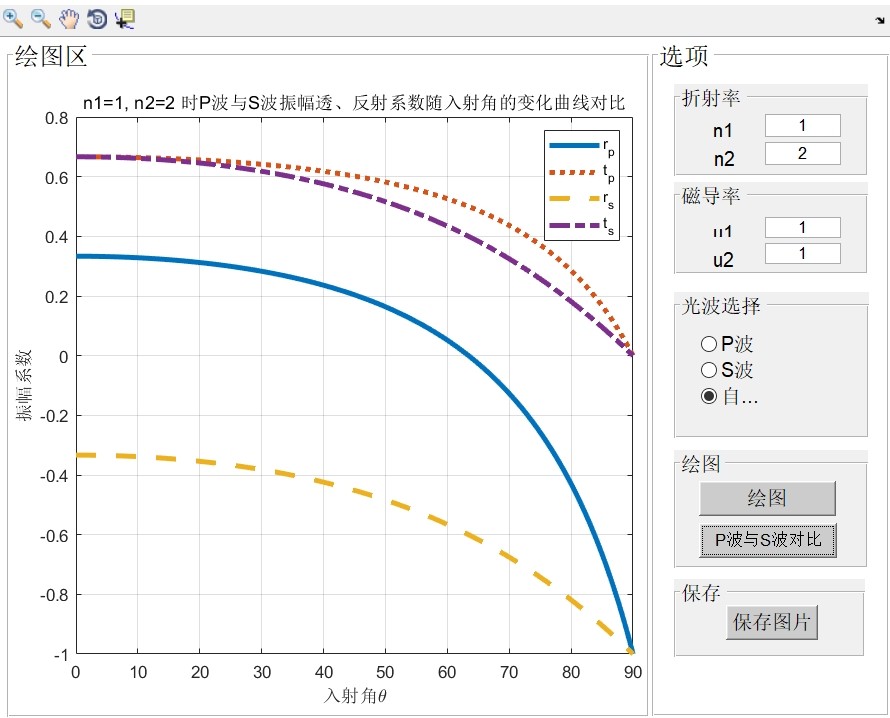
基于MATLAB的根据菲涅尔公式计算:1.P波、S波的振幅透射系数及振幅反射系数2.P波、S波的透射比及反射比3.自然光的透射比和反射比在光学领域,菲涅尔公式对于理解光在不同介质界面处的行为至关重要。今天咱们就借助MATLAB来计算基于菲涅尔公式下各类光学系数。
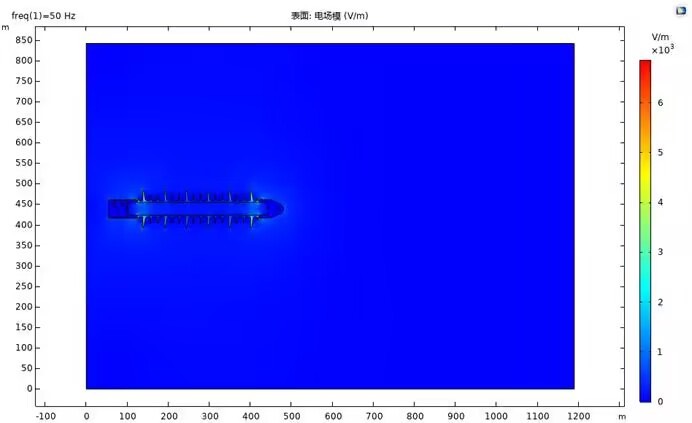
comsol 二维110kV绝缘子电场计算模型,可以得到绝缘子内部电势和电场分布,在电力系统的研究领域,准确分析绝缘子的电场分布至关重要。今天咱就来唠唠基于 Comsol 搭建的二维 110kV 绝缘子电场计算模型,瞧瞧它是如何展现绝缘子内部电势和电场分布的奇妙景象。
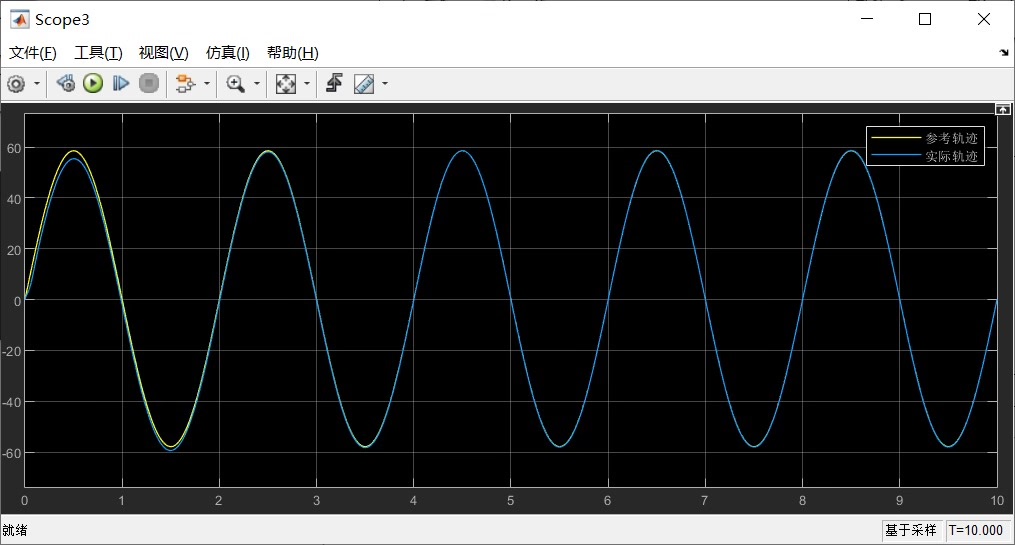
今天咱们就手把手用MATLAB搞个完整的仿真流程,从基础的运动学建模到轨迹跟踪控制,中间穿插点动力学分析。这段代码的关键在于处理三个支链的几何约束,注意atan2函数比普通反正切更智能,能正确处理象限问题。实际跑起来会发现某些位置会无解,这就是机器人的奇异位形,后续控制时要避开这些区域。典型的误差会在±1mm内波动,如果出现持续发散,可能是动力学模型不准或者摩擦没考虑。三个主动臂带动动平台运动,这
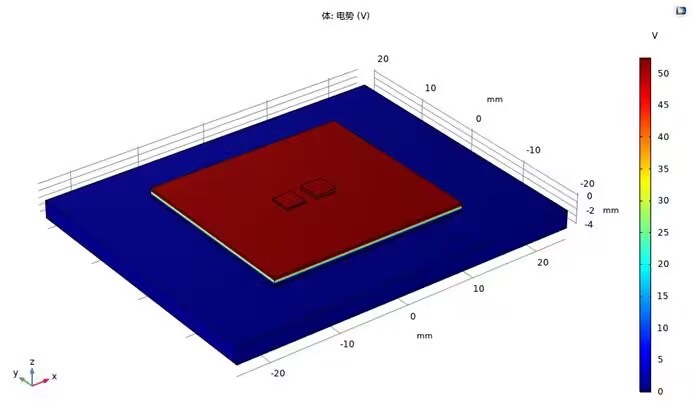
当芯片温度飙到500K,导电能力直接翻三倍,这可不是乱写的,碳化硅材料在高温下确实会发生载流子迁移率变化。突然发现某个角落的电场强度爆表,但温度却异常低——八成是网格在这个位置划得太粗,赶紧用局部加密功能补刀。最后导出的数据用MATLAB做后处理时,记得把电流密度和温度场做卷积运算,能揪出隐藏的热电震荡点。打开COMSOL的时候千万别被那些花里胡哨的模块吓到,今天咱们要折腾的碳化硅芯片电热耦合模型
最近在折腾Stewart并联平台的仿真,发现用MATLAB搞这个特别有意思。这段代码的核心思想是把动平台坐标系下的安装点先旋转再平移,和基座安装点做向量差。注意eul2rotm这个函数,它把欧拉角转成旋转矩阵的顺序很重要,这里用的是Z-Y-X顺序,和大多数机器人标准一致。仿真做到这个程度,基本上可以拿去和实际平台参数做对比验证了,不过记得真实舵机有响应延迟,仿真时最好加个一阶滞后环节。接下来得算逆
大数据分析项目python--微博文本情感分析研究思路:基于情感词典基于机器学习LSTM算法支持向量机(SVM)包含内容:数据集文档代码在大数据时代,社交媒体数据蕴含着丰富的信息,微博作为热门社交平台,其文本内容能反映大众的情感倾向。今天咱们就聊聊如何用 Python 来进行微博文本情感分析,这其中涉及基于情感词典,以及机器学习里的 LSTM 算法和支持向量机(SVM)。
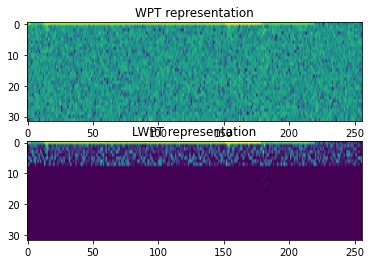
不过实践中更稳妥的做法是用传统小波基(比如db4)的系数作为初始值,相当于给模型一个知识起点。有趣的是,当我们在端到端任务(比如分类)中将这些可学习小波层作为特征提取器时,滤波器参数会朝着有利于分类的方向演化。算法运行环境为Python,采用Pytorch深度学习模块,执行基于深度学习模型的可学习小波包变换和基于深度学习模型的离散小波变换框架,能够从数据中自动进行学习并根据目标函数进行优化,附带参