登录社区云,与社区用户共同成长
邀请您加入社区
AR1105 的价值,不在于堆了多少麦克风,而在于用精巧的算法与极简的接口,把"声源定位"这一原本高门槛的能力,压缩进一枚 37×26mm 的模组里,并以 6 个高电平 IO 口直接交付结果。对于想做智能交互、安防追踪、循声机器人的团队来说,它意味着:少写代码、少占空间、少踩算法坑,就能让产品真正"听"出声音的方向。当机器不仅能听见,还能听出方向,人与设备的互动,便从"你说我听",走向了"你在我转
本文为创龙科技RV1126B 评估板 Linux 应用开发指南,涵盖开发环境搭建、交叉编译、GDB 远程调试及 LED 闪烁实战。提供完整命令与工程化案例,支持 Qt、LVGL、OpenCV 等框架开发。创龙科技以标准化流程降低开发门槛,帮助用户快速实现嵌入式 Linux 应用开发与调试验证。
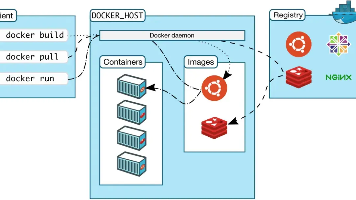
本文面向 RK3588 系列创龙单板、工控机,详述嵌入式 ARM 平台 Docker 完整使用流程。文档包含宿主机 Docker 环境部署、本地私有 Registry 搭建、单 / 多 ARM 镜像构建推送,以及设备端镜像拉取、容器运维全套实操命令,附带工程示例与磁盘占用分析,解决嵌入式应用环境兼容问题,为工业边缘容器化项目提供标准化落地流程。
创龙科技ARM工控机,有瑞芯微RK3588/RK3576/RK3562等处理器可选,集成了Modbus、CANopen、OPC UA等工业组件,已通过EMC测试,并获得CE、FCC、RoHS等国际权威认证,真正做到开箱即用,能省去繁杂的硬件调试、驱动适配、组件移植和系统优化等工作。工控机已通过EMC(静电、浪涌、辐射、传导等)、高低温、高温老化、满负荷、3000次上掉电、全功能、电源稳定性等测试,
这篇文章介绍了如何在逗脑IDE中快速为ESP32开发板搭建MicroPython开发环境并运行Python代码的全流程。主要内容包括:1)自动安装串口驱动;2)一键下载并烧录MicroPython固件;3)通过串口连接开发板;4)编写简单Python代码测试;5)运行代码查看结果。整个过程完全在逗脑IDE内完成,无需命令行操作或切换多个工具,大幅简化了嵌入式开发的门槛。文章强调该IDE将硬件开发简
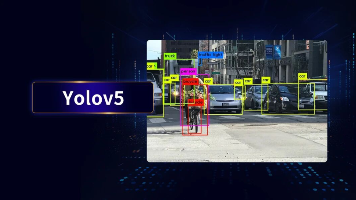
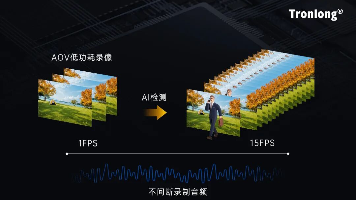
此方案基于瑞芯微最新推出的低成本AI视觉处理器RV1126B,采用4核A53@1.75GHz + 3TOPS算力NPU架构,支持INT4/INT8/INT16/FP16多种运算精度,同时兼容TensorFlow/PyTorch/Caffe/Tflite等深度学习框架,模型适配能力强。该方案搭载YOLOv5s模型,在640x640标准推理分辨率下,实测检测速度稳定达到20fps,推理与画面输出同步无
【摘要】"逗脑IDE"是一款专为简化硬件编程而设计的集成开发环境,其核心特点是"开箱即用"和降低学习门槛。该软件整合了ESP32/树莓派开发全流程,用户可在统一界面管理多平台文件、一键烧录代码,并内置AI调试助手实时查错修复。针对新手提供Blockly图形化编程模块,同时集成Python/C++教程和硬件开发课件,支持3D模型预览等扩展功能。开发者通过整合工
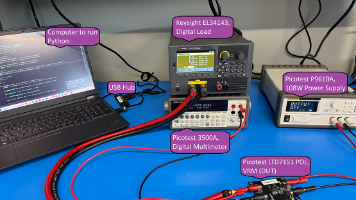
通过 PyVISA 资源管理器与仪器建立开放通信。您还可以请求仪器的 ID,以验证是否连接了正确的设备。
volatile 关键字可以保证变量的可见性,它会强制将对变量的写操作立即刷新到主内存,并使其他线程的工作内存中该变量的缓存行无效。在Java 6之后,JVM对synchronized进行了大量优化,引入了偏向锁、轻量级锁、适应性自旋(Adaptive Spinning)、锁消除(Lock Elimination)、锁粗化(Lock Coarsening)等技术,极大地减少了锁操作的开销,使得它在
现代C++不断扩展constexpr的能力,现在甚至可以在编译时进行复杂的操作。这包括数学计算、字符串处理和容器操作,实现了真正的零运行时开销抽象。零开销抽象是C++设计的核心理念,意味着高级抽象不应该引入运行时开销。模板提供了类型安全的编译时多态,而C++20引入的概念进一步强化了这一能力。了解容器、算法和工具类的内部实现机制,可以帮助开发者选择最适合的高性能组件,避免隐式性能损失。通过结合这些
能耗分析模块采用自动化、信息化技术,实现从能源数据采集、过程监控、能源介质消耗分析、能耗管理等全过程的自动化、科学化管理,使能源管理、能源生产以及使用的全过程有机结合起来,运用先进的数据处理与分析技术,进行离线生产分析与管理,实现全厂能源系统的统一调度,优化能源介质平衡、有效利用能源,提高能源质量、降低能源消耗,达到节能降耗和提升整体能源管理水平的目的。感知层:连接于网络中的各类传感器,包括多功能
openclaw 养龙虾一体机,个人 AI 助手,自动化,爬虫等等超低功耗,超小巧,比手掌还小养龙虾一个月电费不到 2 块钱到手上电,配网,简单配置即可使用。
依托 SBC-TL3588 单板、EPC-TL3588 工控整机搭建 ROS2 Humble 开发环境,梳理 Ubuntu 交叉编译、自定义功能包构建、板端节点通信整套操作流程。搭配 turtlesim 仿真案例完成可视化验证,完整记录代码编译、消息交互、设备调试命令,适配嵌入式机器人项目快速开发调试。
本文详细介绍了如何将Vivado 2023.1与Vscode深度整合,解决编辑器卡死问题,并构建高效的Verilog开发环境。通过命令行参数优化和插件生态配置,硬件工程师可以显著提升开发效率,实现代码编辑、调试和版本控制的无缝协作。
本文详细介绍了在树莓派上使用FT4222模块的完整流程,从驱动安装到Python控制SPI/I2C接口的实用技巧。通过硬件准备、驱动版本选择、Python环境配置、SPI通信设置和GPIO控制等步骤,帮助开发者避开常见陷阱,实现高效稳定的硬件通信。特别适合硬件爱好者和嵌入式开发者参考。
滤波能力 ≈ 电容 × 电流 ÷ 时间,整流滤波可用公式估算,LDO/高频滤波多靠经验和阻抗频率响应理解。
树莓派5代正式发布后,硬件和性能的全面升级让众多开发者们都想入手感受一波,外观上Raspberry Pi 5 与前代产品非常相似,不过,在保留信用卡大小的整体尺寸的同时,也更新了一些设计元素,以适应新芯片组的功能。
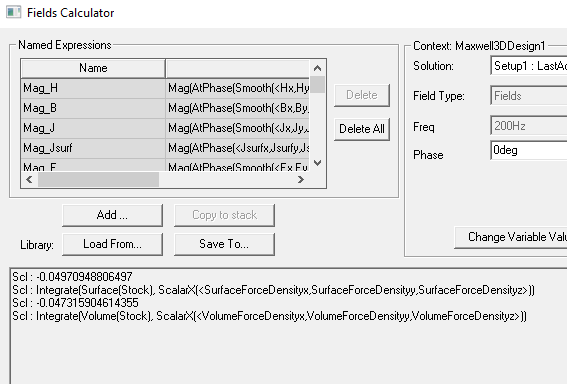
以下是场计算器中用于计算名为 Stock 的物体上直流力密度的 X 向分量的步骤,结果如下所示。在此示例中,与表面力密度积分相比,体积力密度积分产生的结果相似,因此体积力密度和表面力密度都可用于映射到其他求解器,例如 Ansys Mechanical。您可以使用场计算器来计算对象上的积分体积力和表面力。它是一个基于堆栈的计算器。
数字内容保护技术是确保音视频数据在传输过程中安全性的核心机制,其基本原理是通过加密与认证协议,防止内容在传输链路上被非法复制与盗版。该技术通过双向认证、链路加密和动态密钥协商等密码学方法,构建起从源端到显示终端的可信通道。对于硬件工程师而言,掌握这项技术不仅关乎产品合规认证,更直接影响信号完整性、系统安全与用户体验。在实际的嵌入式系统与消费电子开发中,内容保护协议通常与HDMI、DisplayPo
此前,创龙科技已完成瑞芯微RK3588评估板 + RK1828国产AI算力卡(SODIMM金手指版本)评估套件的适配工作,在端侧大模型推理、工业视觉检测等场景实现高效落地,获得众多工程师认可。采用M.2 Key B-M标准金手指,相比传统SODIMM接口,兼容性大幅提升,可直接适配带M.2 Key插槽的工控机、单板机、评估板,简化硬件设计,降低适配门槛。使用Qwen2.5及Qwen3系列模型进行测
当检测到人形则切换为正常帧率模式,正常帧率模式连续5帧未检测到人形时,重新进入AOV低帧率模式。这意味着,在漫长的待机时间里,设备仅消耗约122mW功率,却始终“在线”,真正实现“全天候守护,费电无感”。从上表可得知,“AOV低帧率模式”相比“正常帧率模式”,节能高达90%+,瑞芯微“低功耗录像技术”让机器视觉设备批量部署更省电!当检测到人形时,切换为正常帧率模式,采集画面变为流畅,左上角显示由"
本文介绍了如何在星图GPU平台上自动化部署⚡ Qwen3-0.6B-FP8极速对话工具,为硬件创客提供本地化AI助手。该工具能快速生成Arduino/树莓派项目文档,并提供结构化的故障排查建议,有效提升硬件开发与调试效率。
本文详细介绍了如何使用树莓派Pico和有源蜂鸣器制作一个反应速度测试仪,包括硬件选型、电路搭建、Micropython代码解析及功能扩展。通过随机触发、声音提示和计时反馈的闭环系统,帮助开发者深入理解GPIO控制、中断处理和随机数生成等核心概念。
本文深入解析树莓派GPIO开发中有源与无源蜂鸣器的核心差异,提供实测数据对比和选型建议。从内部结构、声学特性到驱动电路设计,详细指导开发者避开常见陷阱,并附Python代码实现音效控制,帮助优化智能硬件项目的警报系统设计。
本文详细介绍了如何将立创EDA的元件库高效导入Altium Designer(AD),并创建可复用的集成库文件。通过工程化思维管理库文件架构,优化原理图符号和PCB封装,实现批量处理和自动化脚本应用,提升硬件设计效率。特别适合PCB设计工程师和硬件开发团队参考。
本文提供ISE14.7搭配黑金S6开发板的完整FPGA开发流程教程,从Verilog代码编写到LED闪烁实现,详细讲解环境配置、工程创建、代码设计、约束文件配置及程序下载调试,适合FPGA初学者快速入门。
本文详细解析了在硬件项目开发中如何选择CPU、ASIC或FPGA的技术路线。通过对比三大技术的性能、成本和开发资源需求,提供了五维决策评估框架和典型应用场景分析,帮助开发者根据项目需求做出最优选择。特别适合需要实时处理和高并行计算的应用场景。
本文为FPGA新手提供从选型到烧录的全面避坑指南,重点介绍了开发板选购、环境搭建、Verilog代码编写及程序烧录等关键步骤中的常见问题与解决方案。通过实战案例,帮助初学者快速掌握FPGA开发的核心技巧,避免常见错误,顺利完成第一个‘点灯’项目。
本文详细介绍了uni-app在集成第三方硬件SDK时的实战经验,涵盖从称重模块到蓝牙打印的插件开发全过程。重点解析了原生插件开发环境配置、SDK集成架构设计、多SDK兼容性处理及性能优化策略,帮助开发者高效解决硬件集成中的常见问题。
本文详细介绍了如何使用Arduino的Wire库开发I2C地址扫描器,快速定位传感器设备并诊断常见通信问题。通过完整的代码示例和实战案例,帮助开发者解决I2C设备地址冲突、总线锁死等常见问题,提升硬件调试效率。
本文详细介绍了如何使用两块Arduino UNO板实现I2C主从机通讯,包括地址扫描、硬件连接和双向数据传输。通过实战代码示例和调试技巧,帮助硬件爱好者快速掌握I2C通讯技术,提升项目开发效率。
本文详细介绍了使用Altium Designer(AD)导出Gerber、钻孔、坐标和BOM全套文件的全流程实战指南。从文件分类到工厂需求差异,再到具体操作步骤和常见问题排查,帮助工程师高效完成PCB打样文件准备,确保生产顺利进行。
本文为FPGA新手提供Quartus II 13.1 SP1的实战避坑指南,详细解析从环境配置到功能验证的全流程。通过一个简单的时钟分频项目,介绍Verilog代码编写、引脚分配、仿真验证等关键步骤,帮助开发者快速上手FPGA开发,避免常见错误。
本文详细解析了PADS导出Gerber文件的关键参数设置,针对嘉立创、捷配等主流板厂的工艺特点,提供了一套完整的配置方案和文件检查清单。从原点设置、覆铜处理到各层Gerber参数详解,帮助硬件开发者避免常见错误,确保PCB生产质量。特别强调了钻孔文件和SMT配套文件的生成技巧,以及交付前的终极检查要点。
本文详细介绍了使用Altium Designer(AD)从PCB设计到工厂下单的全流程,重点讲解了Gerber文件、钻孔文件、BOM表和坐标文件的输出方法。通过实战步骤和常见问题解决方案,帮助工程师准确生成生产文件,确保PCB制造和SMT贴片的顺利进行,提升硬件产品化效率。
本文详细解析了Altium Designer中Gerber文件导出的全流程,包括阻焊层、钢网层和丝印层的作用与设置技巧。通过实战避坑指南和专业级质量检查流程,帮助硬件工程师避免常见错误,确保PCB制造的准确性。特别适合需要精确导出Gerber文件的AD用户。
硬件开发
——硬件开发
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 DAMO开发者矩阵
DAMO开发者矩阵

 AI编程社区
AI编程社区


 AI硬件创业社区
AI硬件创业社区
 AMD开发者中国社区
AMD开发者中国社区
 AI Agent技术社区
AI Agent技术社区
 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区







 HarmonyOS开发者社区
HarmonyOS开发者社区
 脑启社区
脑启社区
 2048 AI社区
2048 AI社区






 MCP技术社区
MCP技术社区
