




- @zhuoqingjoking97298
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
全国大学生智能汽车竞赛是国内极具影响力的工程实践类学科赛事,始终以“立足培养、重在参与、鼓励探索、追求卓越”为核心宗旨,覆盖自动化、智能制造、车辆工程、电子信息、计算机、大数据与人工智能、机器人、电气工程、机械工程等数十个工科专业,为全国高校学子搭建了一个理论落地、技术创新的科技嘉年华,是国内规模最大、影响力最广的工程实践类赛事之一。英飞凌与所有招聘企业,期待在总决赛现场与热爱技术、勇于创新的你相
全国大学生智能汽车竞赛是国内极具影响力的工程实践类学科赛事,始终以“立足培养、重在参与、鼓励探索、追求卓越”为核心宗旨,覆盖自动化、智能制造、车辆工程、电子信息、计算机、大数据与人工智能、机器人、电气工程、机械工程等数十个工科专业,为全国高校学子搭建了一个理论落地、技术创新的科技嘉年华,是国内规模最大、影响力最广的工程实践类赛事之一。英飞凌与所有招聘企业,期待在总决赛现场与热爱技术、勇于创新的你相
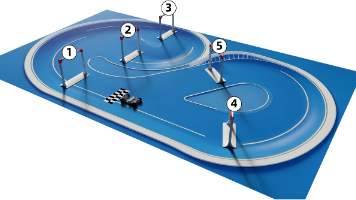
挑战赛开始之前,大家在现场领取定向感应模块,自行通过预留的接口和位置进行安装,然后集中进行调试,挑战赛开始之后,准备好的队伍需主动进行排队,依次进入挑战赛比赛赛道开始比赛,同时由队员向裁判告知自己的学校和队伍名称,方便统计成绩,若本次挑战完成,则记录本次运行时间;电磁门采用PVC管加3D打印结合件进行制作,PVC管的整体框架使得电磁门更加结实可靠也易于拼接,电磁门为方形,内部的大小约36*36厘米
4、 四个BTB连接器,核心板所有的IO全部引出,最小的一个BTB连接器所引出的IO建议不要使用,这个连接器里面包含的IO主要和一些调试以及其他特殊端口,为了避免引起无法启动等问题,建议不要使用这些IO。通过第二章可以得知,需要完成锥桶的识别和交通标识的识别才能完成挑战赛任务,因此,要求在TC4上运行目标检测模型和图片识别模型,其中使用了TC4系列的PPU单元加速了神经网络部分的计算。脚本包括训练

【代码】搜索所有的TEASOFT Python 的头文件。
如下,是在自己计算机中安装看的 Python 3.12.10 的软件包列表。
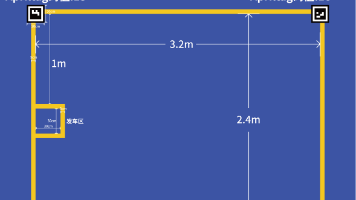
全国大学生智能汽车竞赛人工智能视觉组比赛即将开始,组委会发布了新版比赛软件系统,优化了场地布置和比赛流程。主要更新包括:调整车库布局为单侧、新增1厘米路肩防护;软件界面改为三关卡连续计时显示,取消手动选图功能;明确判罚规则(完成关卡数要求、遗漏箱子罚时)和计时规则(分关卡累计)。比赛将提供两种磁吸式车模标识牌(含AprilTag码),要求参赛队必须使用现场提供的标识牌。运行裁判系统需满足RTX30
为了获得剪影转场蒙版, 先准备两个黑白图片, 导入剪影进行编辑。接下来, 你就不要客气了,将喜欢的剪影转场特效施加在两个镜头中间进行转场。下面,将这个视频转成图片序列,便可以实现图片镜头转场了。将两个蒙版各自除以 255,然后分别乘以转场的两幅图片。利用同一个模版以及它的亮度反色分别对两个图像进行叠加, 然后将叠加的结果重叠在一起,便可以将两幅图像融合在一起了。文介绍了如何使用 Python

全国大学生智能汽车竞赛是教育部重点支持的A类学科竞赛,旨在培养大学生综合实践能力和创新意识。竞赛涵盖人工智能、控制、电子等多学科知识,由权威组织委员会和技术专家委员会共同管理。组委会由清华大学周杰教授任主任,各高校领导及专家组成,确保赛事规范性和公平性。技术专家委员会由各赛区推荐专家构成,负责赛题设计、技术判定和仲裁工作。该竞赛对深化工程教育改革、培养创新人才具有重要意义。

摘要: 第二十一届全国大学生智能汽车竞赛西部赛区招募赛道铺设志愿者,要求参赛队伍提交赛道铺设证明并登记报名,7月18日统一铺设。人工智能模型组由百度独立完成,其他组别需学生参与。志愿者可优先试车,报名截止7月10日。此举旨在践行"全员参赛、全员办赛"理念,鼓励学生深度参与赛事筹备。
