登录社区云,与社区用户共同成长
邀请您加入社区
本文提出一种基于C++现代特性(C++17/20)的高效代码设计框架,结合模板元编程与表达式专用解析模型,突破传统解析器的设计瓶颈。- RAII容器管理:使用`std::array`的SBO优化替代`std::vector`小数据。| 运行时AST构建| 420| 518| 23.3%|| 解析时间(ms)| 1420| 1105| 22.2%|| 中断异常率| 17.3%| 4.1%| 76.3
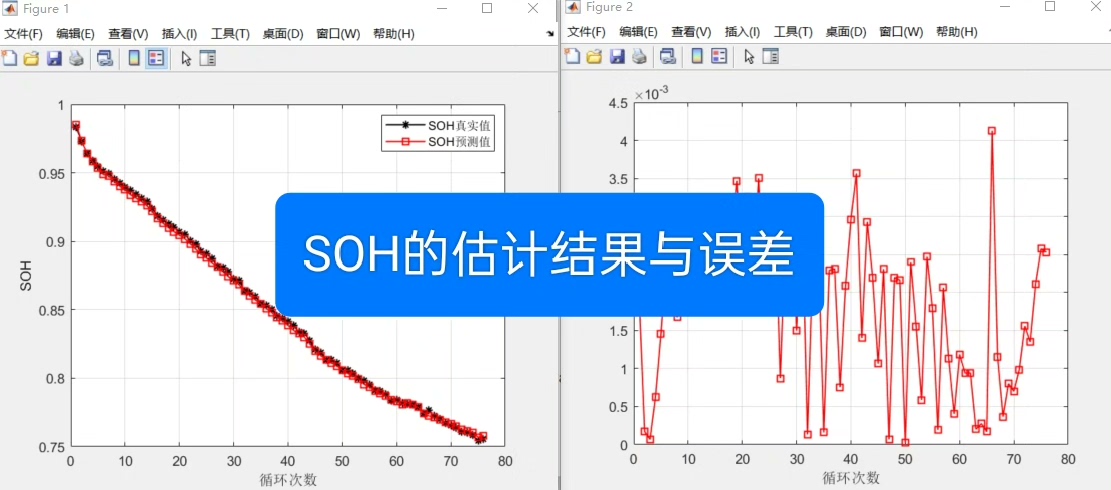
牛津数据集包含8 枚 740 mAh 的 LiCoO2/Graphite 18650 电池,在 40 °C 恒温箱内循环执行“1 C 恒流恒压充电 + 1 C 恒流放电”老化实验,每 100 循环插入一次性能测试(HPPC + 容量标定)。本案例以“牛津锂离子电池老化数据集(Oxford Battery Degradation Dataset)”为蓝本,给出一条从原始二进制结构→可训练特征→LST
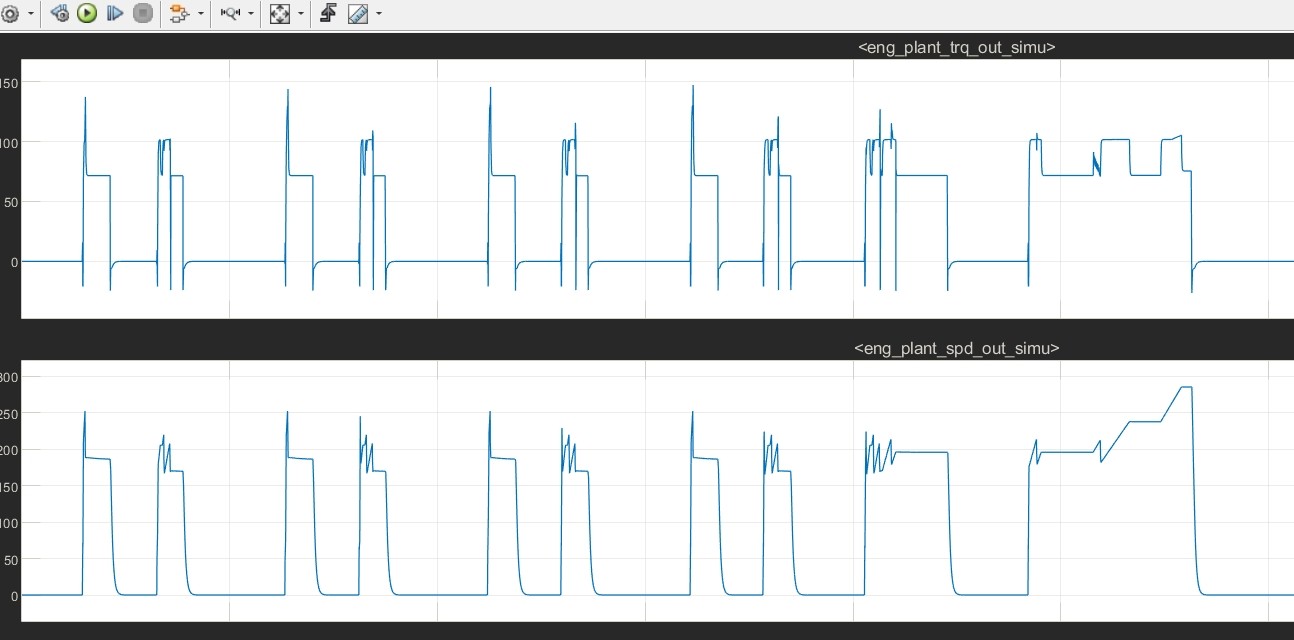
混合动力汽车simulink整车模型,并联P2构型,基于规则的控制策略,可以直接进行CTC,WTLC,NEDC等工况仿真,模型运行及仿真最近在研究混合动力汽车的 Simulink 整车模型,今天就来跟大家分享一下基于并联 P2 构型以及基于规则控制策略的一些有趣发现,并且看看如何用它来进行 CTC、WTLC、NEDC 等工况仿真。
调一下光敏电阻的亮度,屏幕上的数值会跟着变,按模式切换键可以改模式,按阈值按键可以调阈值,自动模式下亮度超过阈值就关窗帘,手动模式下按开关按键就能控制窗帘开和关。最后是核心的电机控制,用的是28BYJ-48五线四相步进电机,减速比挺大的,转一圈要好久,刚好适合窗帘用,驱动用ULN2003,毕竟STM32的IO口带不动电机的电流。按键这块我用了四个,分别是阈值加、阈值减、模式切换、手动开关,都是接在
永磁同步电机双闭环矢量控制simulink模型(内含报告)PMSM矢量控制主要包括3个部分:转速环PI调节器、电流环PI调节器和SVPWM算法。详细给出电流环和转速环PI调节器的参数设计方法,搭建转速电流双闭环矢量控制系统的仿真模型并给出仿真结果。内含一万多字学习资料。在电机控制领域,永磁同步电机(PMSM)因其高效、节能等优点被广泛应用。而双闭环矢量控制则是PMSM控制中常用且有效的策略。
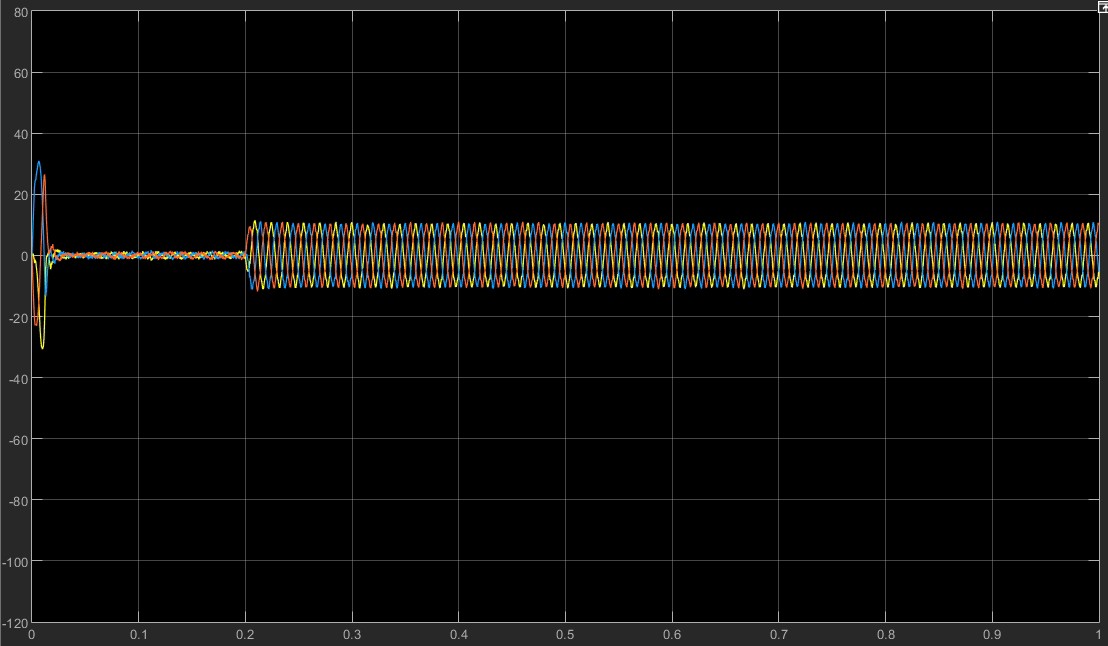
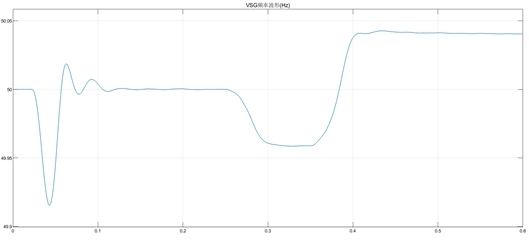
虚拟同步发电机控制系统:MATLAB/SIMULINK仿真模型(2018b)及说明报告,仿真结果良好。说明报告的第一部分首先概述了并网逆变器的基本原理和常见的控制方法。第二部分介绍了同步坐标系下并网逆变器的数学模型。第三部分阐述了基于电网电压定向的直接电流控制策略的控制原理。第四部分介绍了并网逆变器控制中的关键技术——锁相环。第五部分展示了直接电流控制的仿真建模过程及仿真结果。第六部分阐述了虚拟同
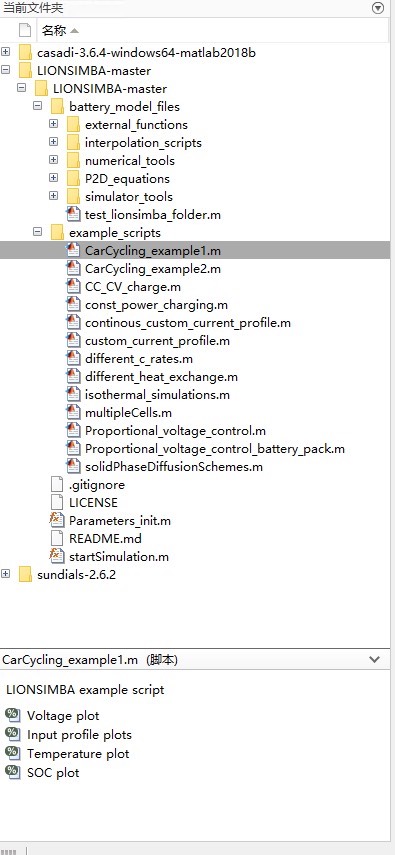
LIONSIMBA(Lithium-ION SIMulation BAttery)是一个基于有限体积法的Matlab框架,专门用于锂离子电池的设计、仿真和控制。该工具箱实现了经典的伪二维(P2D)电化学模型,也称为Doyle-Fuller-Newman模型,能够精确模拟锂离子电池内部的复杂电化学和热力学过程。自定义电流/功率曲线材料特性函数SOC估计算法控制策略实现。
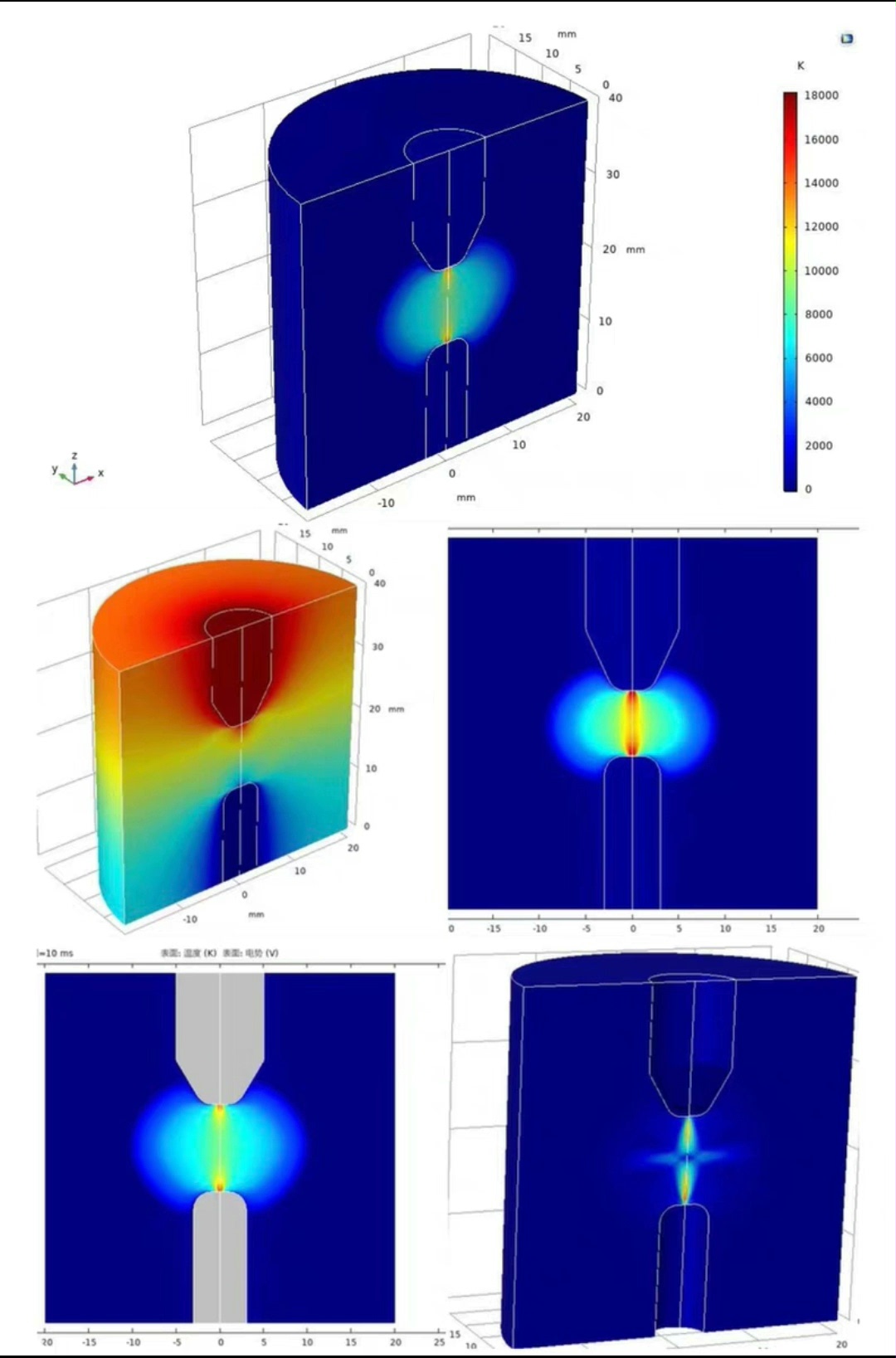
comsol电弧放电模型,采用磁流体方程模拟电弧放电现象,耦合电磁热流体以及电路多个物理场一共四个模型最近在研究Comsol电弧放电模型,真的感觉打开了一个超有趣的物理世界大门!今天就来和大家分享一下这里面的奇妙之处。Comsol电弧放电模型主要采用磁流体方程来模拟电弧放电现象。这可不是一般的模型,它耦合了电磁、热流体以及电路等多个物理场,通过四个不同的模型来全方位展现电弧放电的复杂过程。
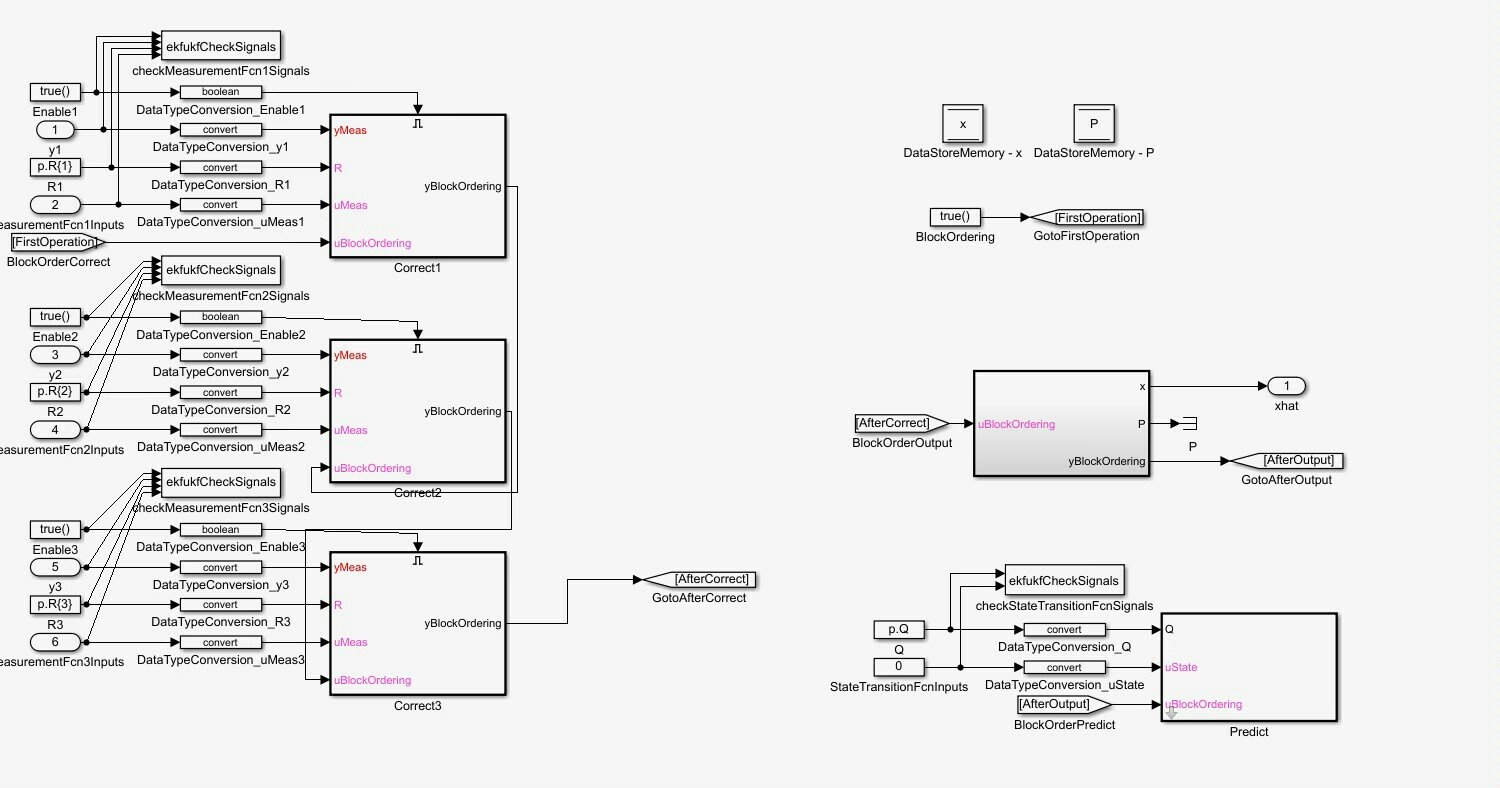
最后留个彩蛋:在Simulink里给轮胎模型加个白噪声模块模拟传感器干扰,当噪声强度超过20%时,UKF的均方根误差比EKF低38.7%。实测发现过程噪声Q的(1,1)元素(对应μ的噪声)设0.01时,雪地工况下估计曲线最平滑,这个值调大了容易跟真值玩"二人转"。注意这里的lambda是滑移率计算模块实时吐出来的信号,Simulink的信号线这时候就像血管里的红细胞,带着数据到处跑。估计模块:无迹
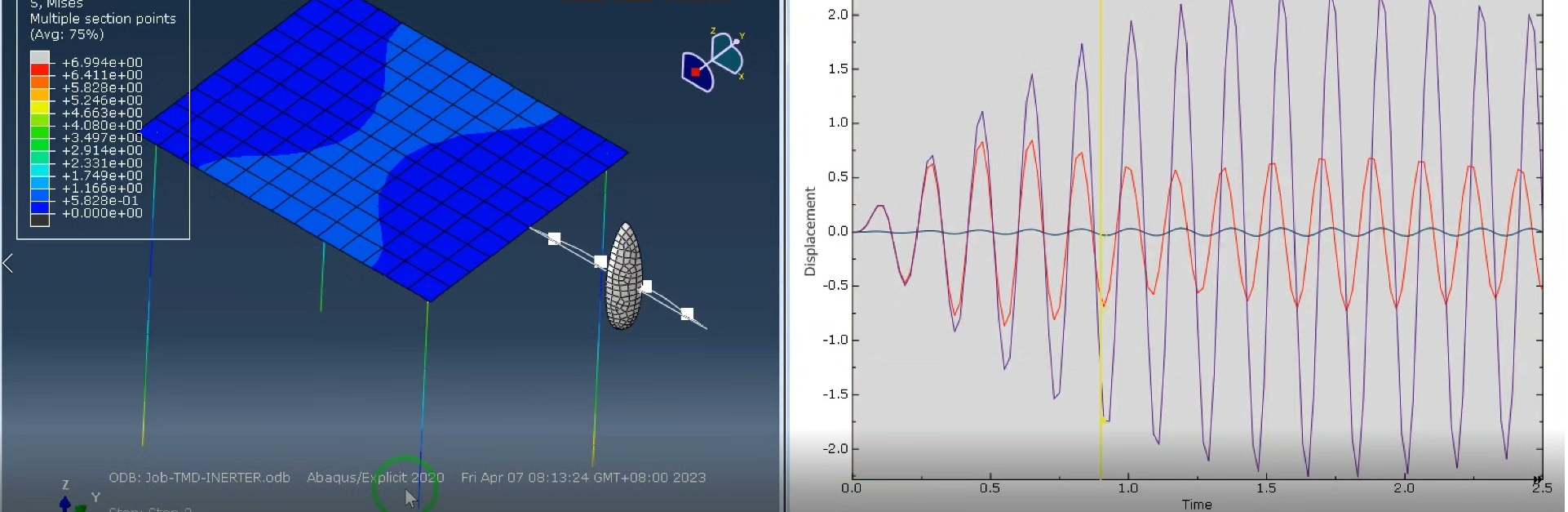
在Abaqus里折腾结构振动控制装置,尤其是调谐质量阻尼器(TMD)和惯容器,这事儿其实挺有意思。比如你想用丝杠螺距和飞轮转动惯量来模拟惯容系数,本质上是在玩“机械系统”和“参数耦合”的游戏。先从一个简单案例说起:假设要在建筑结构顶部加个TMD,同时用丝杠飞轮结构实现惯容器,怎么在Abaqus里快速搭出模型?假设丝杠螺距p=5mm,飞轮J=0.02 kg·m²,那么b=0.02/(0.005)^2
图像显示则由`cv2.imshow()`函数实现,它会创建一个窗口来展示图像内容,通常与`cv2.waitKey()`和`cv2.destroyAllWindows()`配合使用以控制窗口的响应和关闭。找到轮廓后,可以进行许多有用的操作,例如计算轮廓的面积、周长、边界框、最小外接圆等几何特性(使用`cv2.contourArea()`, `cv2.arcLength()`等函数)。OpenCV的`
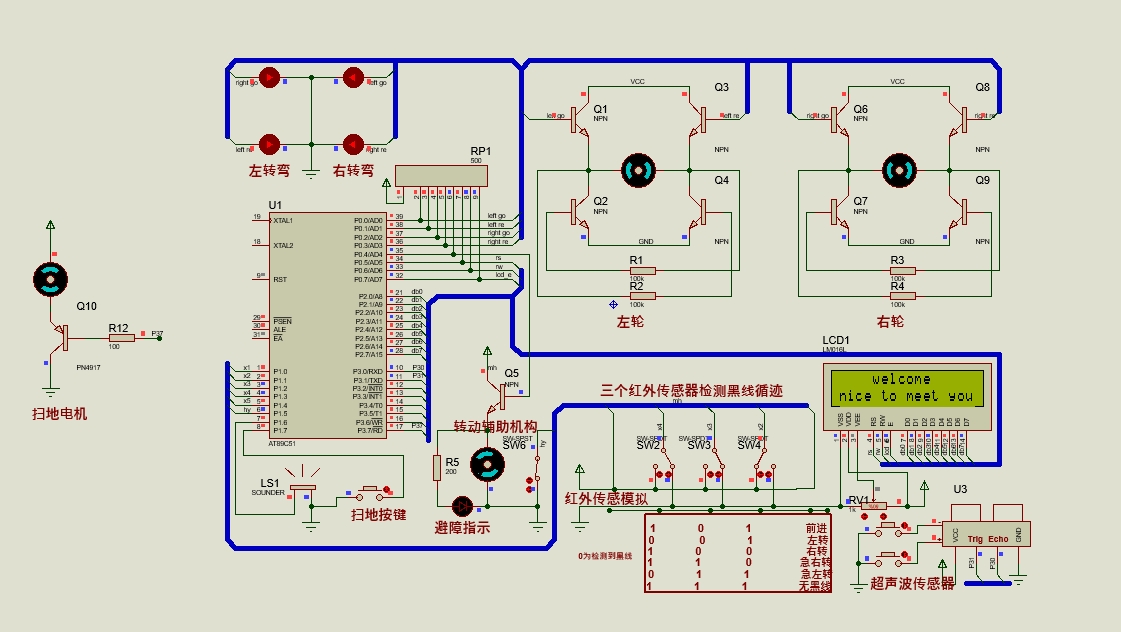
本文介绍了一款基于51单片机的智能扫地小车系统,该系统集成了自动寻迹、障碍物避障和清洁功能。通过超声波传感器检测前方障碍物,红外传感器实现路径跟踪,配合电机驱动模块完成自主导航与清洁任务。系统采用模块化设计,具有良好的可扩展性和稳定性。
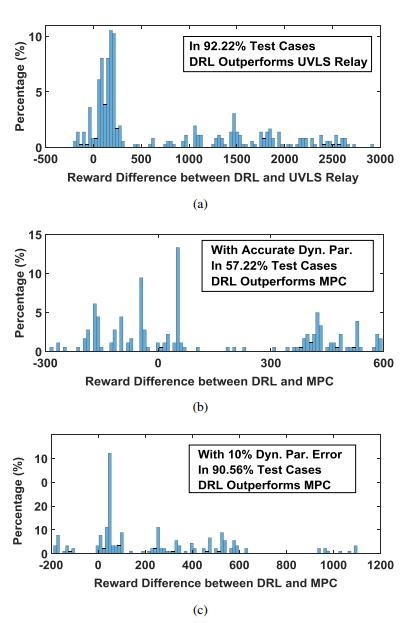
深度强化学习方法来解决电力系统的控制和决策问题 源代码利用InterPSS仿真平台作为电力系统模拟器。开发了一个与OpenAI兼容的电网动态仿真环境,用于开发、测试和基准测试电网控制的强化学习算法。电力系统应急控制,控制方案采用深度强化学习(DRL)高维特征提取和非线性泛化能力。提出了基于DRL的发电机动态制动和欠压减载应急控制方案,所开发的DRL方法鲁棒性对不同仿真场景,模型参数的不确定性和噪声
首先真得骂一句E宝,你说突然更新个Fab直接弃用原来的商城是什么逆天操作,而且作为一个十月刚入门的开发者来说真的很伤脑,教程直接就能从Editor内置的Quixel Bridge直接导入素材到项目,结果现在全变成了Get It On Fab,并且在Fab中Add或者Download在我的保管库中都找不到素材。点击Add to Project,这样就可以添加到我们的项目了。但是经过三天的折腾和一夜的
1、环境初始化最小化安装 Centos 7.x/Ubuntu x86_64 操作系统的虚拟机,vcpu 2,内存 4G 或更多,操作系统盘 50G,为保证效果特额外添加一块单独的数据磁盘大小为 50G 并格式化挂载到/data1.1 设置主机名和磁盘挂载节点信息IP主机名角色系统版本10.10.100.110es-node1node1Ubuntu 18.04.310.10.100.111es-no
quixel
——quixel
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI Agent技术社区
AI Agent技术社区
 腾讯云开发者社区
腾讯云开发者社区
 AtomGit开源社区
AtomGit开源社区
 AI硬件创业社区
AI硬件创业社区

 魔乐社区
魔乐社区
 智能体开发者社区
智能体开发者社区
 DAMO开发者矩阵
DAMO开发者矩阵
 2048 AI社区
2048 AI社区

 华为开发者空间
华为开发者空间
