- @2401_87358448
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
西门子S7系列PLC C#上位机通信系统是基于Visual Studio 2017开发环境,采用C#语言构建的Windows窗体应用程序。该系统依托S7.Net通信库与HslControls控件库,实现了对西门子S7全系列PLC(涵盖S7-200、S7-200 SMART、S7-300、S7-400、S7-1200、S7-1500)的通信管理。系统核心功能包括PLC连接配置、实时数据监控、寄存器读
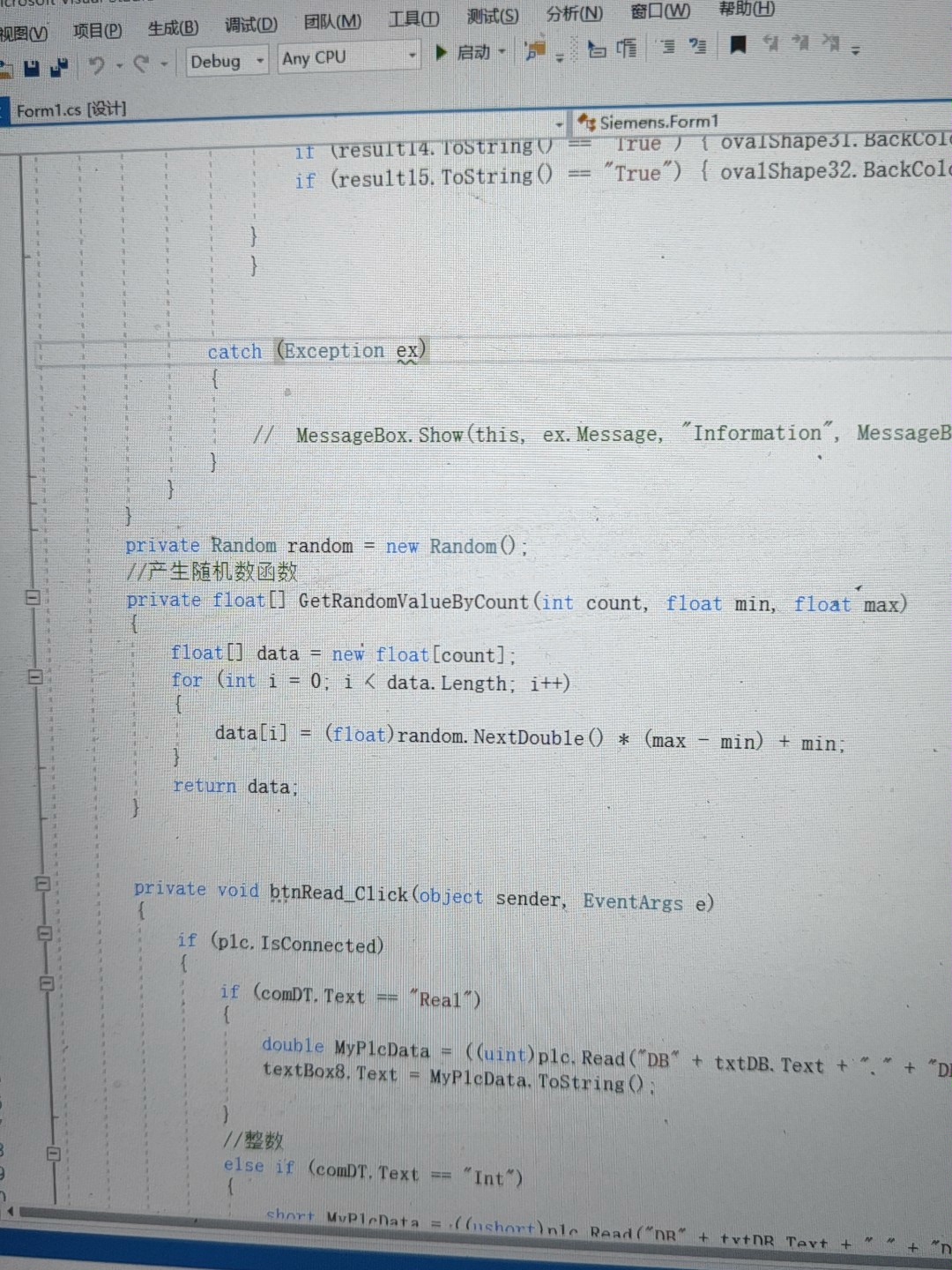
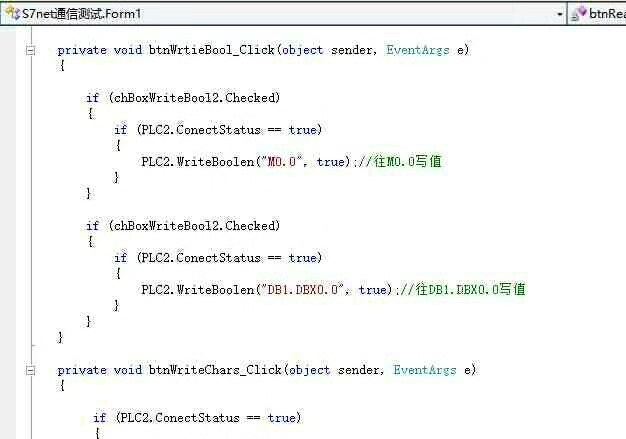
本项目是一套基于C#语言开发的西门子PLC以太网通信上位机程序,依托S7.Net(版本0.1.9)组件实现与西门子S7-1200、S7-1500及S7-200 Smart系列PLC的双向数据交互。程序采用多线程架构设计,支持多种数据类型的读写操作,并提供可视化操作界面,可实时监控通信状态与数据交互结果,适用于工业自动化场景中PLC设备的数据采集与控制需求。
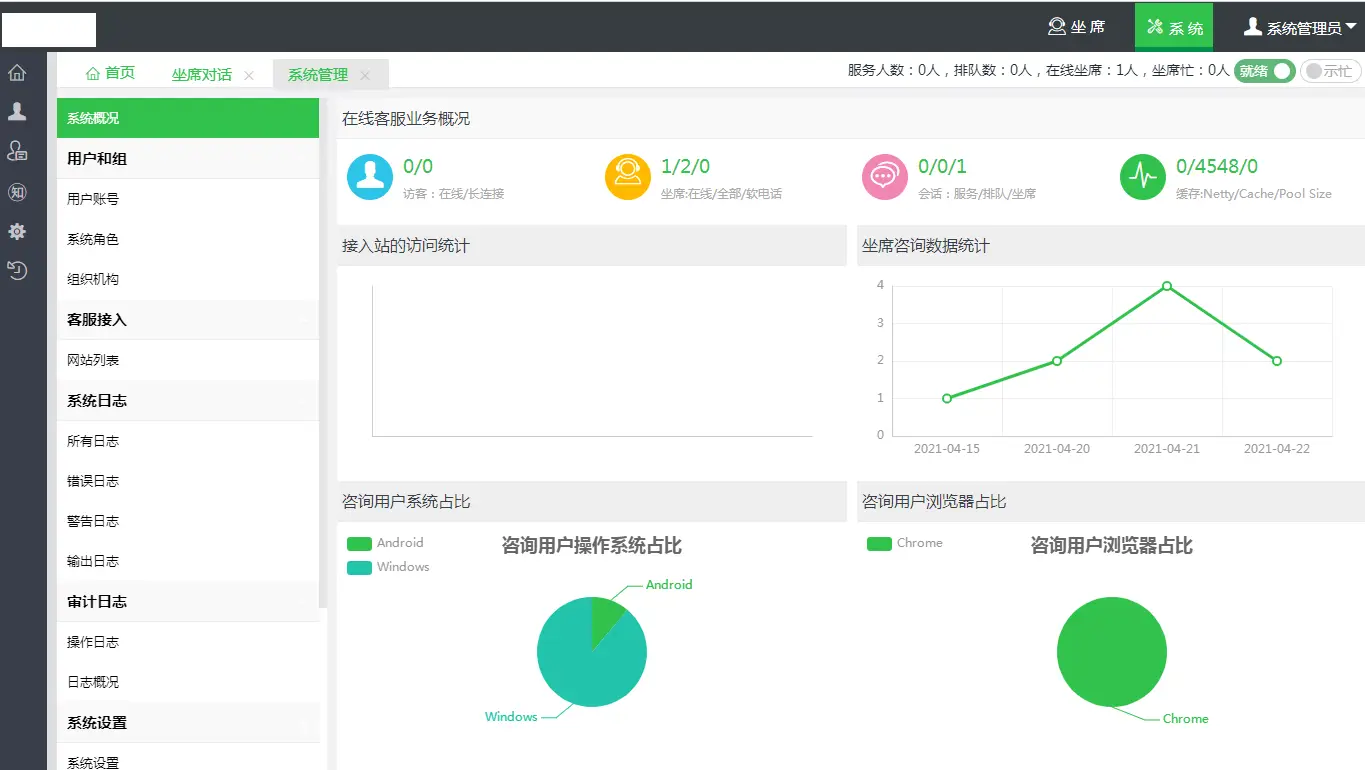
在开发一个Java在线客服系统时,选择合适的框架和技术栈是至关重要的。这次我们选择了Java作为主要开发语言,结合Spring Boot来简化配置和开发过程,MySQL作为数据库,以及Netty框架来处理网络通信。通过结合Spring Boot的便捷性和Netty的高性能,这个Java在线客服系统不仅能够处理大量的并发连接,还能提供实时的数据统计和用户交互,极大地提升了用户体验和后台管理的效率。每
记住别在halcon代码里写死路径,框架的ResourceManager会自动定位到项目下的images文件夹,新手克隆仓库直接F5就能跑起来。注意那个OpenFramegrabber可能抛出的HalconException,框架里用统一错误码处理,比原生的HOperatorSet友好多了。用HSV颜色空间转换替代RGB是个坑,框架里的ColorConverter类自动处理通道顺序问题,避免新手被
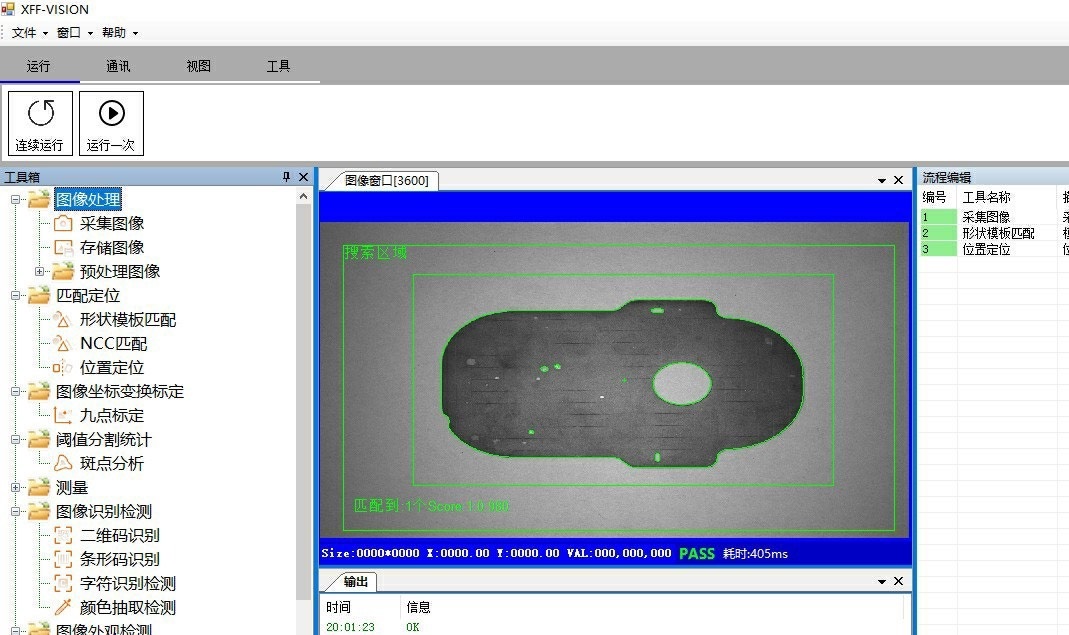
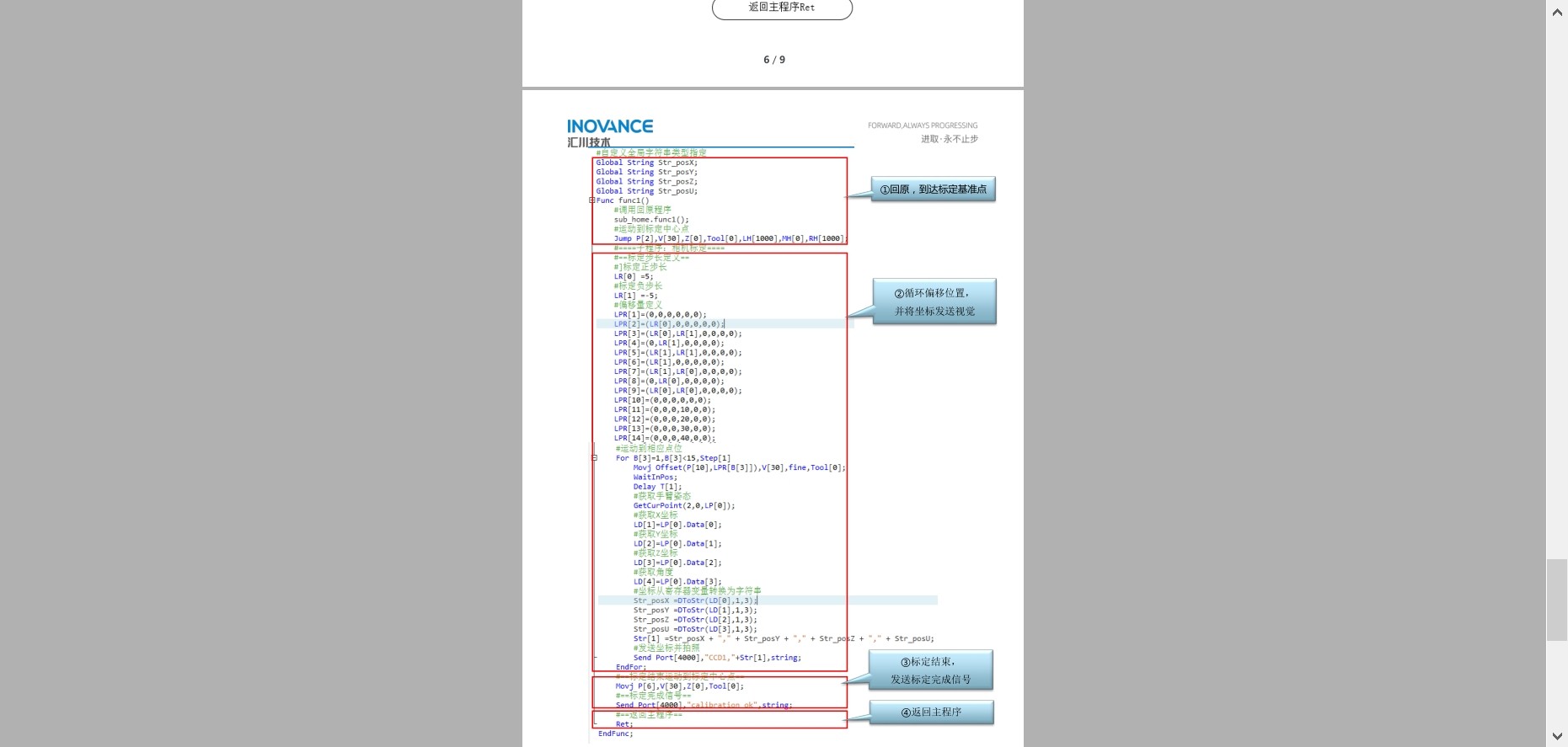
汇川机器人21版本的Demo程序就像一个贴心的引路人,为我们指引了编程的方向,提供了基础的逻辑框架。但编程的世界是充满创意和变化的,我们要利用好这个Demo给予的思路,在实际项目中大胆探索,对程序进行修改和优化,逐步形成符合自身项目特点的编程规范和框架,让机器人更好地为我们服务。希望大家在汇川机器人编程的道路上越走越顺,玩出更多的花样!
齿轮几何参数:模数(m=3)、齿数(主动轮Zp=32,从动轮Zg=51)、压力角(20°)结构尺寸:齿宽(b=30mm)、各圆半径(分度圆、齿顶圆、基圆、齿根圆、轴孔)材料属性:弹性模量(E_GD=206GPa)、泊松比(v=0.3)啮合特性:重合度计算(zeta=1.7036)
基于vivado的ad9680 FPGA芯片测试1g采样率lane4verilog编写,包括配置ad,配置时钟,jesd204b接收在FPGA开发领域,与高速ADC芯片如AD9680协同工作是一项充满挑战但又极具乐趣的任务。今天咱们就聊聊基于Vivado平台,针对AD9680芯片,实现1G采样率且4通道(lane4)的FPGA测试程序,并且是用Verilog语言来完成哦。

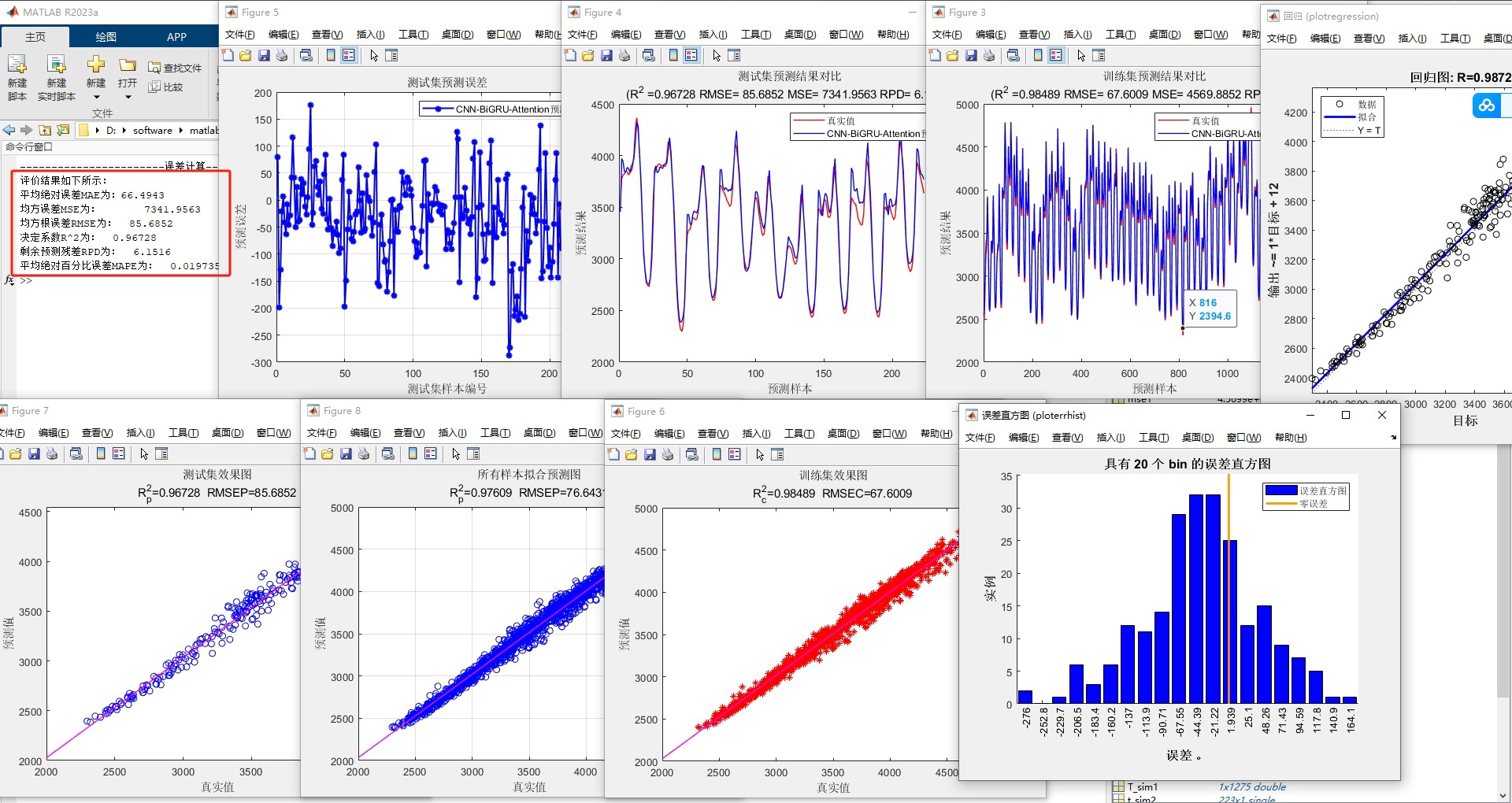
这个模型就像搭积木一样,把卷积神经网络的局部特征捕捉、双向GRU的时序记忆和注意力机制的"重点标记"能力揉在一起,实测效果比单干模型能打得多。后面的双向GRU贼有意思——正向GRU读取从前往后的时间流,反向GRU倒着读,相当于让模型同时拥有"瞻前顾后"的能力。CNN-BIGRU-Attention多维时序预测,基于卷积神经网络(CNN)-双向门控循环单元-注意力机制(CNN-BIGRU-Atten
LT9611UXC固件代码展示了完整的视频桥接解决方案,具备高度的自动化和稳定性。通过精密的时钟管理、自适应输入检测和完整的HDMI协议支持,实现了高质量的MIPI到HDMI视频转换功能。代码结构清晰,模块化设计良好,为各种视频转换应用提供了可靠的基础。
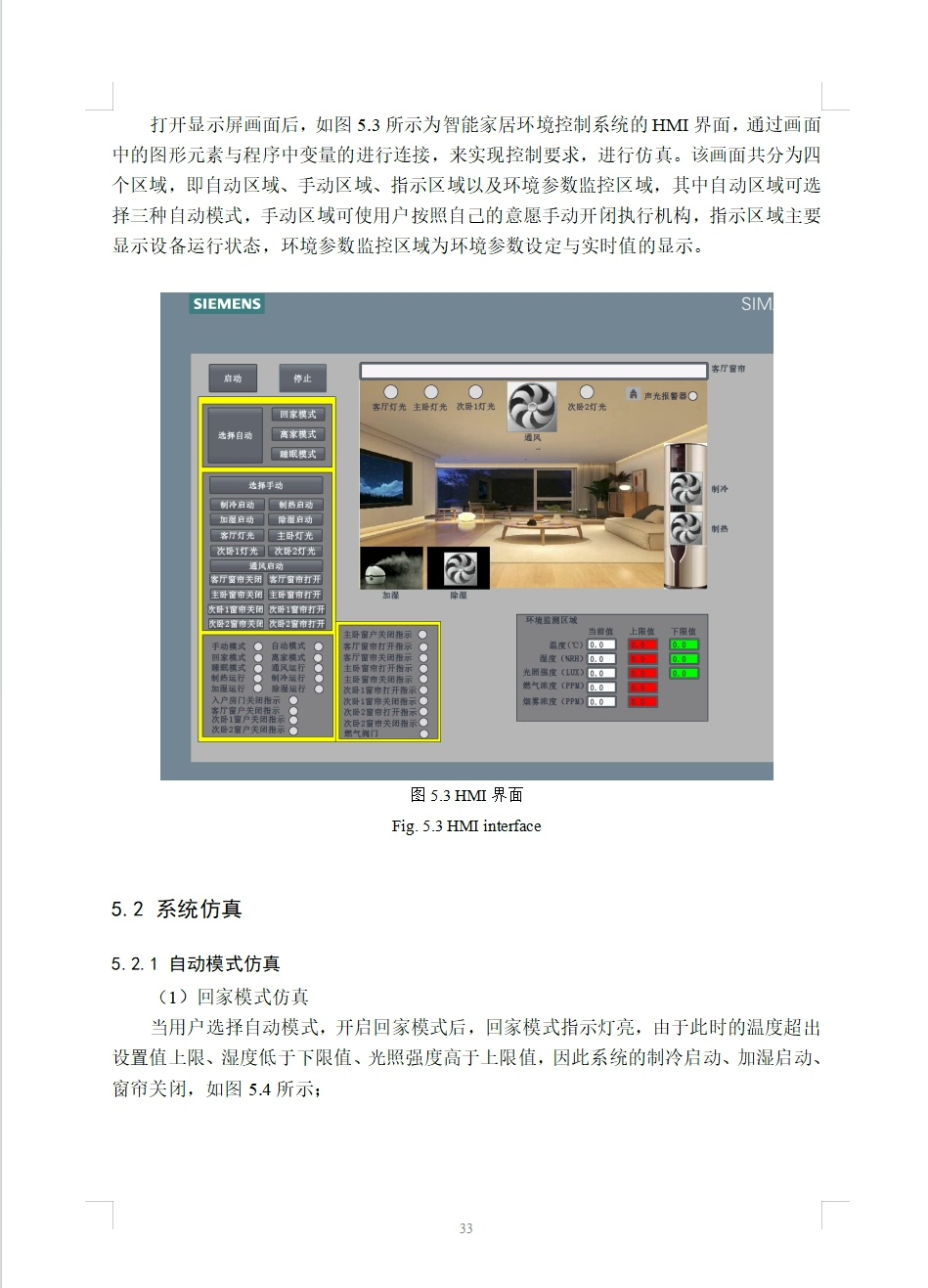
基于PLC的智能家居环境控制系统设计清晨6:30,窗帘自动拉开15度,加湿器开始吐出第一缕白雾。此时厨房的咖啡机突然抽风似的疯狂震动——别误会,这不是什么灵异事件,只是某位程序员用PLC(可编程逻辑控制器)搞的智能家居系统在耍宝。