




- @LDtPLYZgoAu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
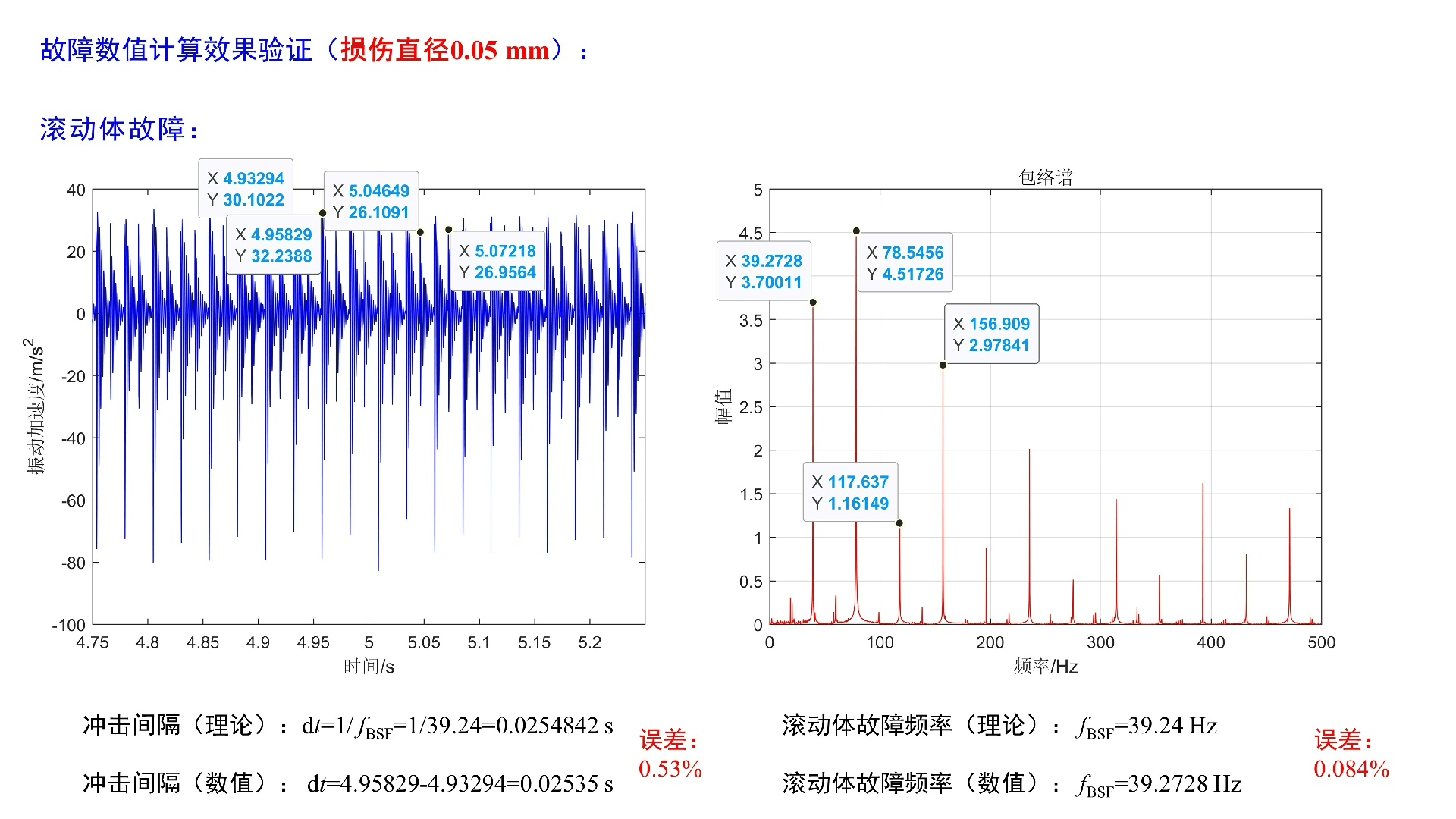
MATLAB轴承动力学代码(正常、外圈故障、内圈故障、滚动体故障),根据滚动轴承故障机理建模(含数学方程建立和公式推导)并在MATLAB中采用ODE45进行数值计算。可模拟不同轴承故障类型,输出时域波形、相图、轴心轨迹、频谱图、包络谱图、滚道接触力,根据模拟数据后续可在此基础上继续开展故障诊断和剩余寿命预测。
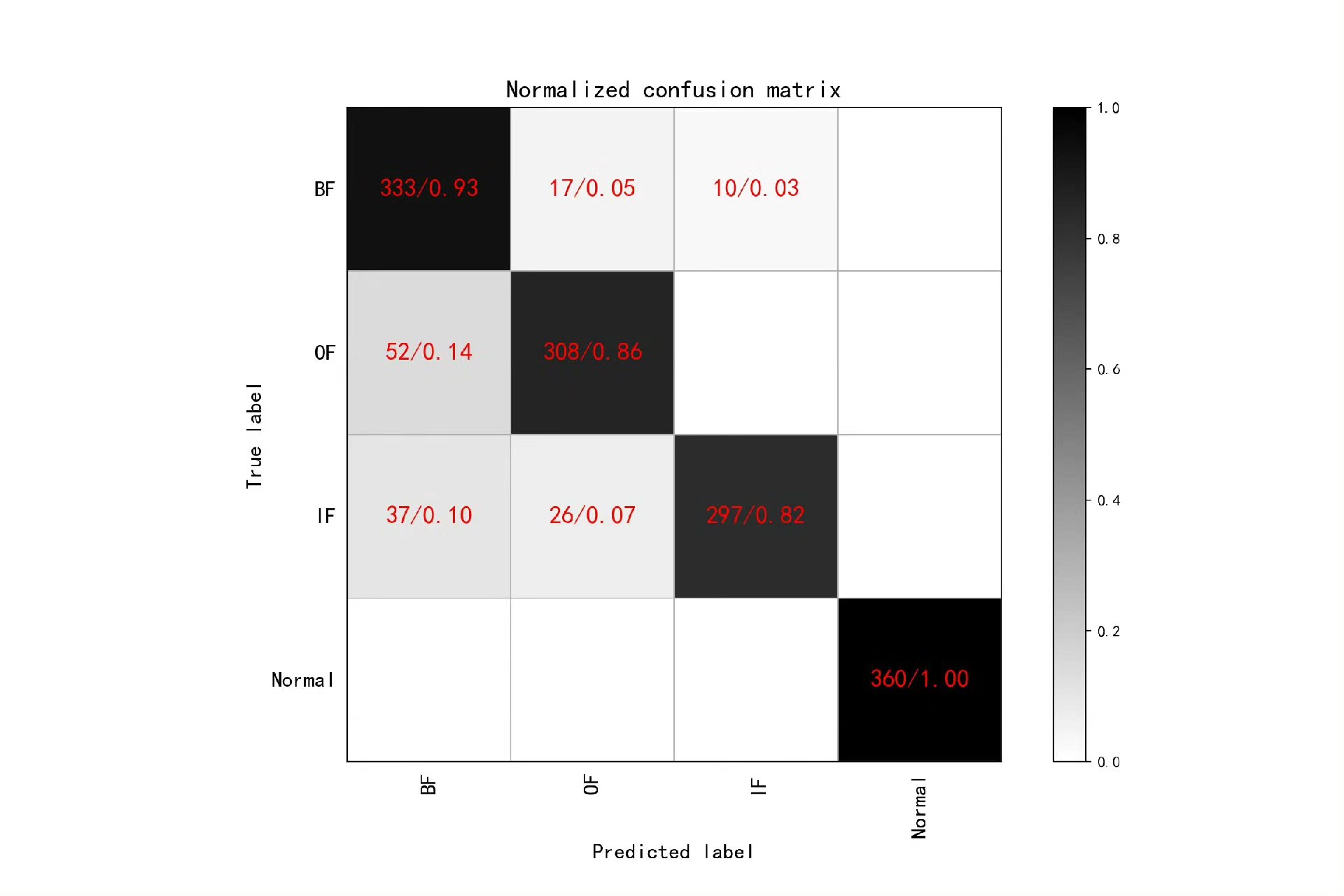
多尺度一维卷积神经网络(MS-1DCNN),西储大学故障诊断识别率为97.5%(验证集)以上适用于刚上手故障诊断的同学,就是从数据处理,到最后出图可视化完整一套流程,看完这个会对故障诊断流程有个清晰认识。多尺度一维卷积神经网络(MS-1DCNN),西储大学故障诊断识别率为97.5%(验证集)以上适用于刚上手故障诊断的同学,就是从数据处理,到最后出图可视化完整一套流程,看完这个会对故障诊断流程有个清
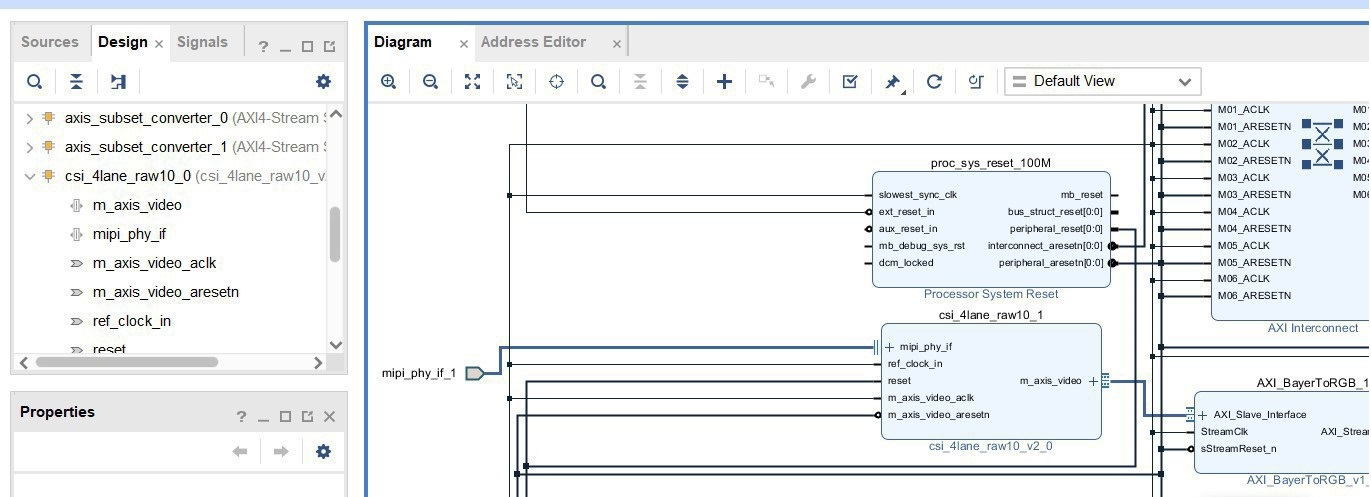
这个IP核最骚的地方在于用Verilog硬怼CSI-2协议,实测索尼IMX系列和OV的摄像头都能直接插,4lane跑起来帧率能到60fps不带喘的。源码包里的USB3.0传输模块实测在Win10下能达到380MB/s的稳定传输,秘诀在于用异步FIFO隔离了图像处理时钟和USB时钟域。lattice工程实现mipi相机采集,转yuv格式通过USB3.0传输,提供完整源码。lattice工程实现mip
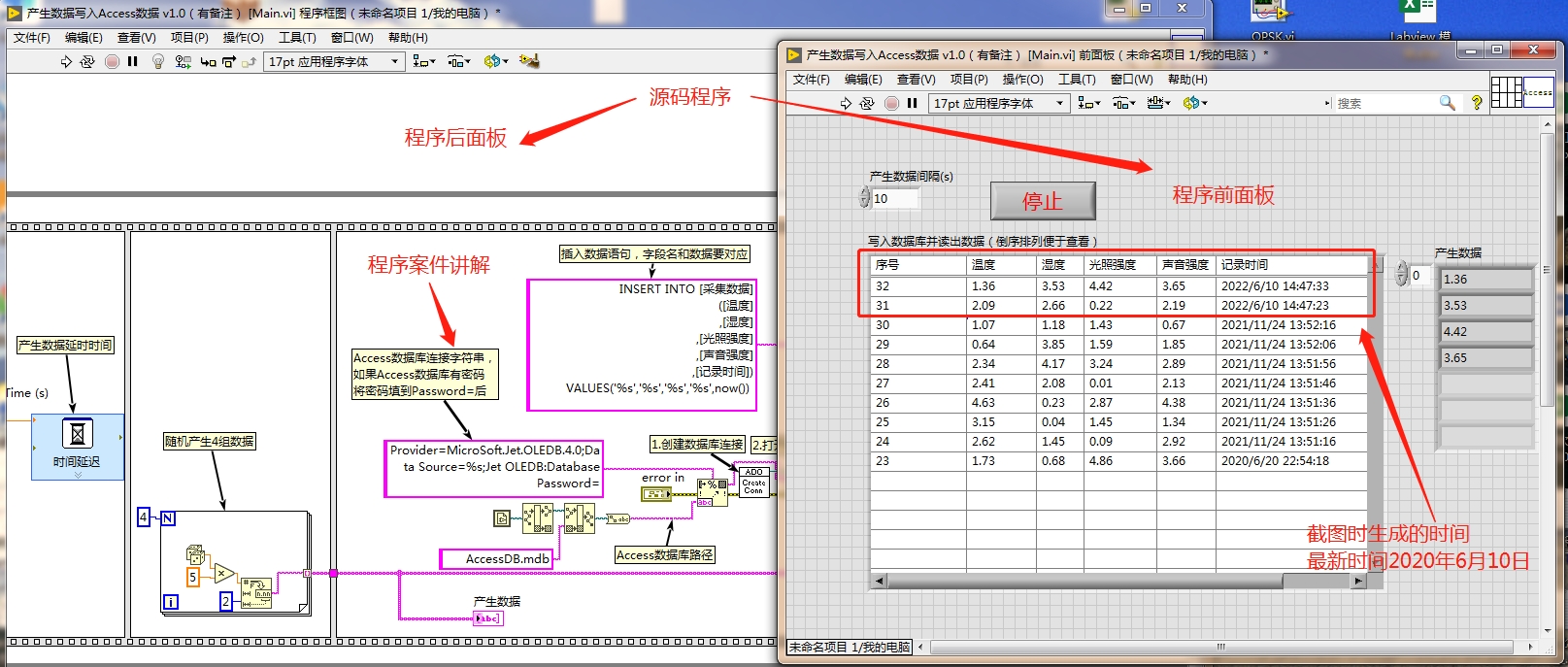
先准备Access数据库,建个空表DataTable,字段分别是ID(自动编号)、Data1到Data4(双精度)、TimeStamp(日期/时间)。解决办法是去微软官网下AccessRuntime.exe,32位和64位版本要跟LabVIEW版本对应,这个坑我摔过三次才记住。LabVIEW 连接Access数据库,读写操作,随机产生1组4个数字,写入数据库实时读出并显示。LabVIEW 连接Ac
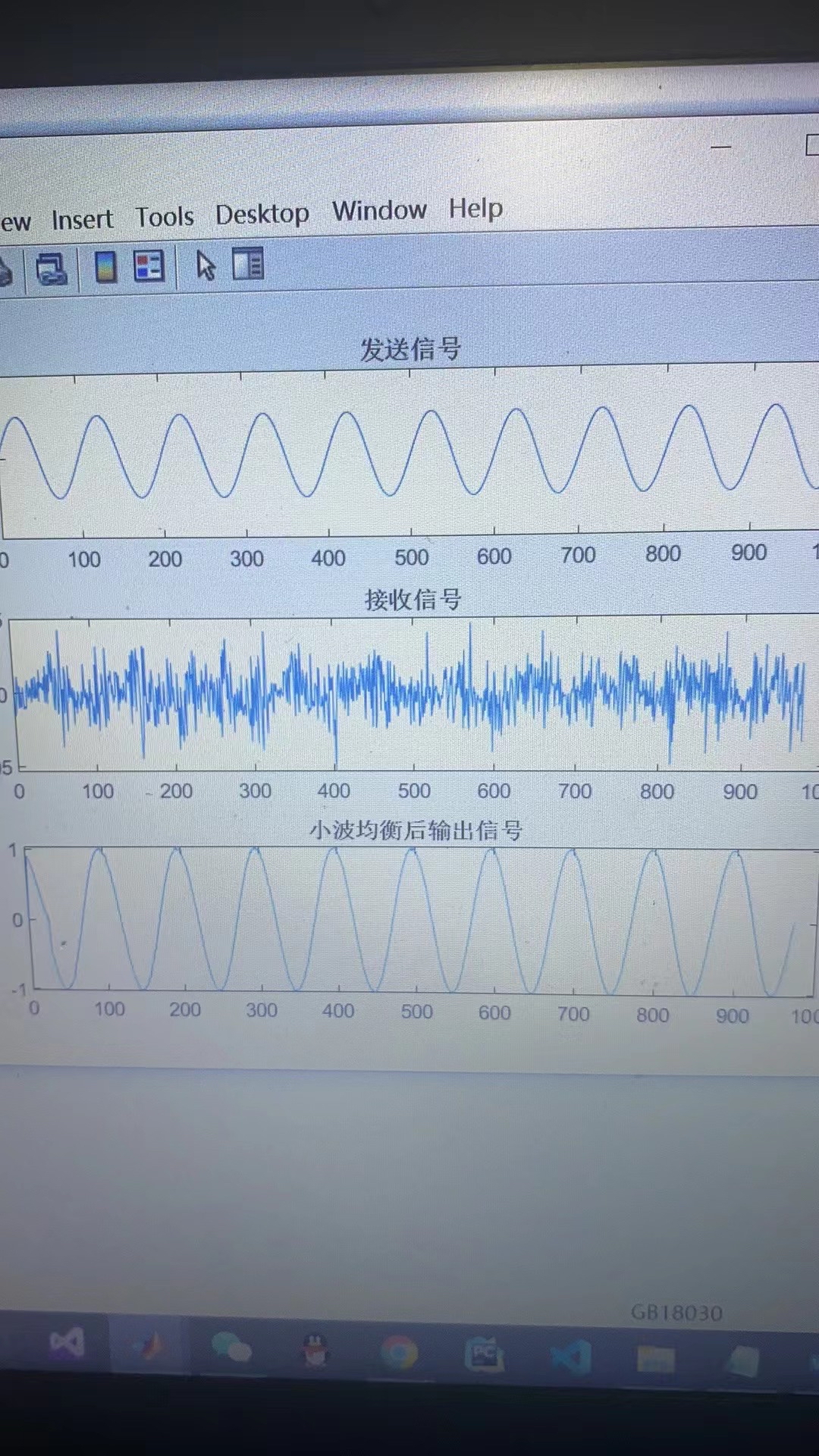
本文档详细阐述一套用于多径衰落信道的均衡算法MATLAB仿真程序,该程序整合了多种经典与改进型均衡技术,旨在补偿信号在传输过程中因信道失真和噪声干扰导致的质量下降,适用于数字通信系统中信道均衡算法的性能验证与对比分析。程序包含8个核心文件,实现了最小均方(LMS)、递归最小二乘(RLS)、恒模算法(CMA)、小波变换均衡及神经网络融合均衡等5类算法,支持4QAM调制信号的全流程仿真,可输出均方误差
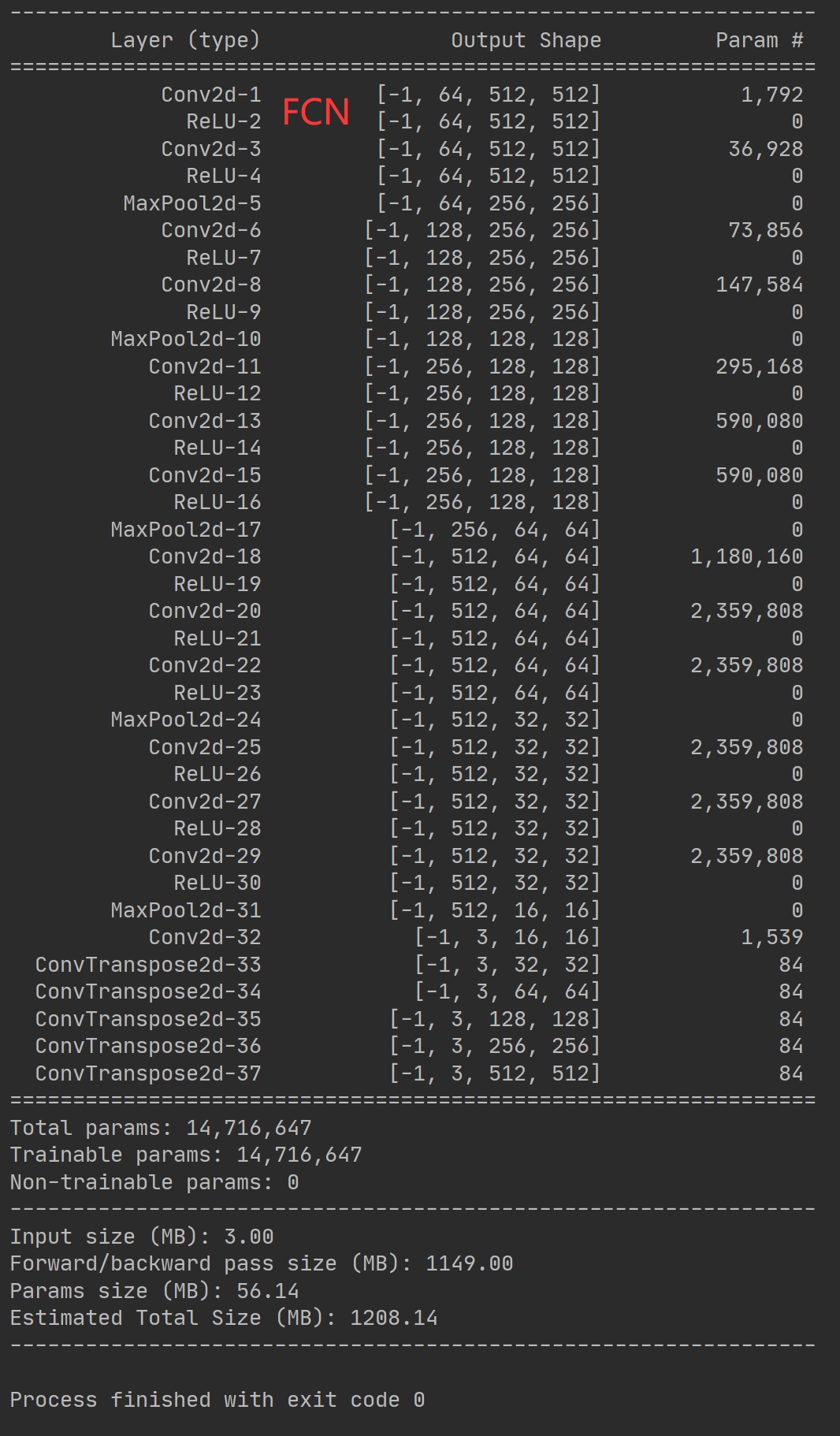
图像分割语义分割unet、 deeplab3、FCN、Resnet网络等基于pytorch框架制作全套项目,包含网络模型,训练代码,预测代码,直接下载数据集就能跑,拿上就能用,简单又省事儿在计算机视觉领域,图像分割一直是个热门话题,无论是语义分割、实例分割还是全景分割,都有着广泛的应用场景,比如医学图像分析、自动驾驶中的场景理解等。
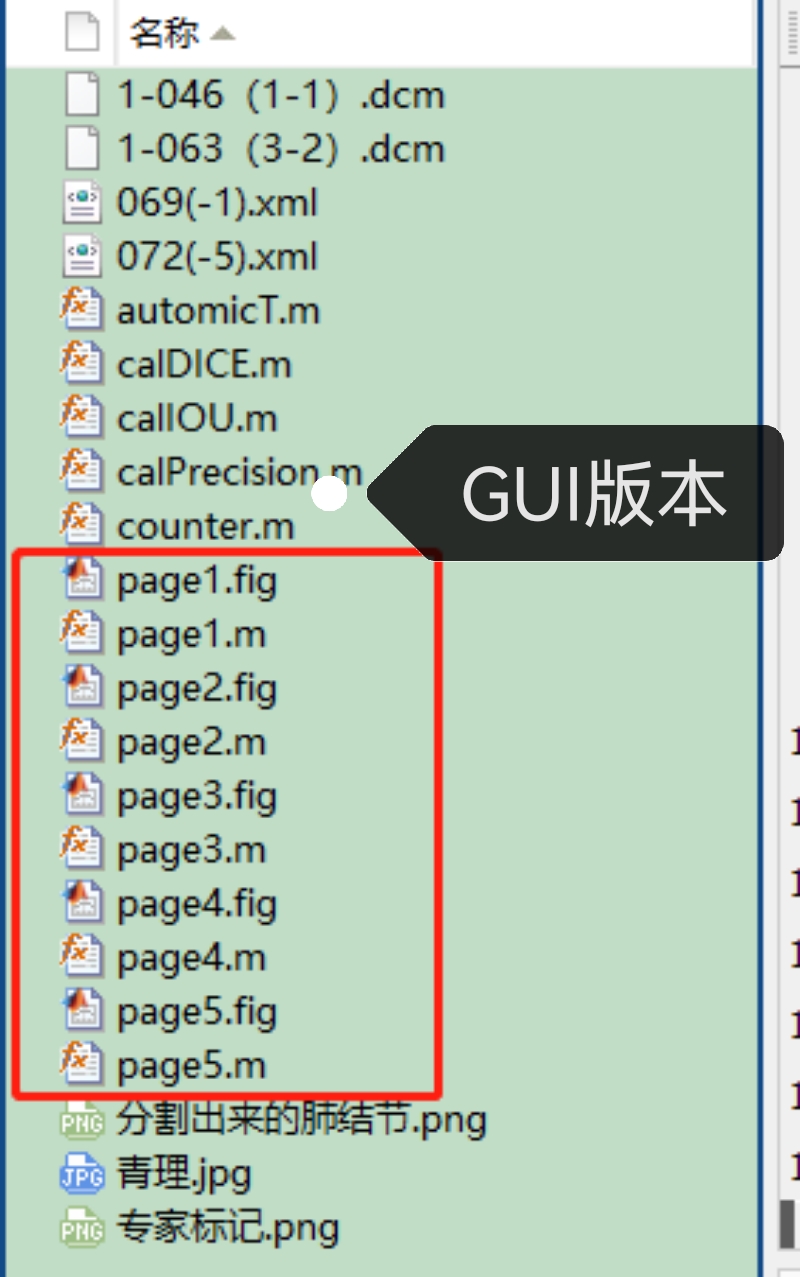
Matlab肺结节分割(肺结节提取)源程序,也有GUI人机界面版本。使用传统图像分割方法,非深度学习方法。使用LIDC-IDRI数据集。工作如下:1、读取图像。读取原始dicom格式的CT图像,并显示,绘制灰度直方图;2、图像增强。对图像进行图像增强,包括Gamma矫正、直方图均衡化、中值滤波、边缘锐化;3、肺质分割。基于阈值分割,从原CT图像中分割出肺质;4、肺结节分割。肺质分割后,进行特征提取
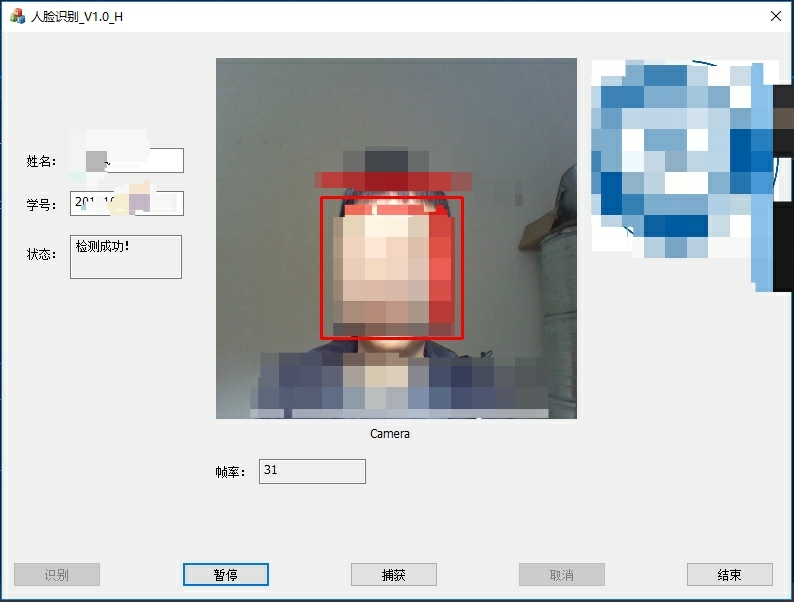
图像识别、脸人识别。可实现数据的在线录入、训练、识别。该软件是基于C++与OPENCV的MFC程序源码。另外可送基于Matlab的识别程序,带GUI界面以及较为详细的算法说明文档。在当今数字化时代,图像识别和人脸识别技术无处不在,从安防监控到手机解锁,它们正深刻改变着我们的生活。今天就来和大家分享一套超有趣的技术方案,不仅能实现数据的在线录入、训练和识别,还涵盖了基于不同编程语言的强大工具。
最近有个项目刚做完,客户要求位置模式下重复定位精度必须稳定在±0.02mm,压力模式误差不能超过10公斤。有次设备在山区信号弱,用边缘计算缓存数据+定时重传硬是撑过了三天断网期,这代码里的重试机制算是没白写。有个客户选了2000档的套餐,结果现场接反了电磁阀线,视频指导了俩小时才搞定,血亏。现场师傅说"你们这算法太老实",硬是加了±8公斤的预警阈值才把波动压在10公斤以内。触摸屏程序+PLC程序+

隐马尔可夫模型(HMM)是一种基于概率的统计模型,广泛应用于语音识别、自然语言处理等领域。HMM的核心思想是通过观察序列(观测序列)来推断隐藏的状态序列。在推荐系统中,我们可以将用户的点击行为或评分行为看作是观测序列,而隐藏的状态序列则代表用户的真实兴趣或偏好。
