- @MSQkiKDPQQ
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
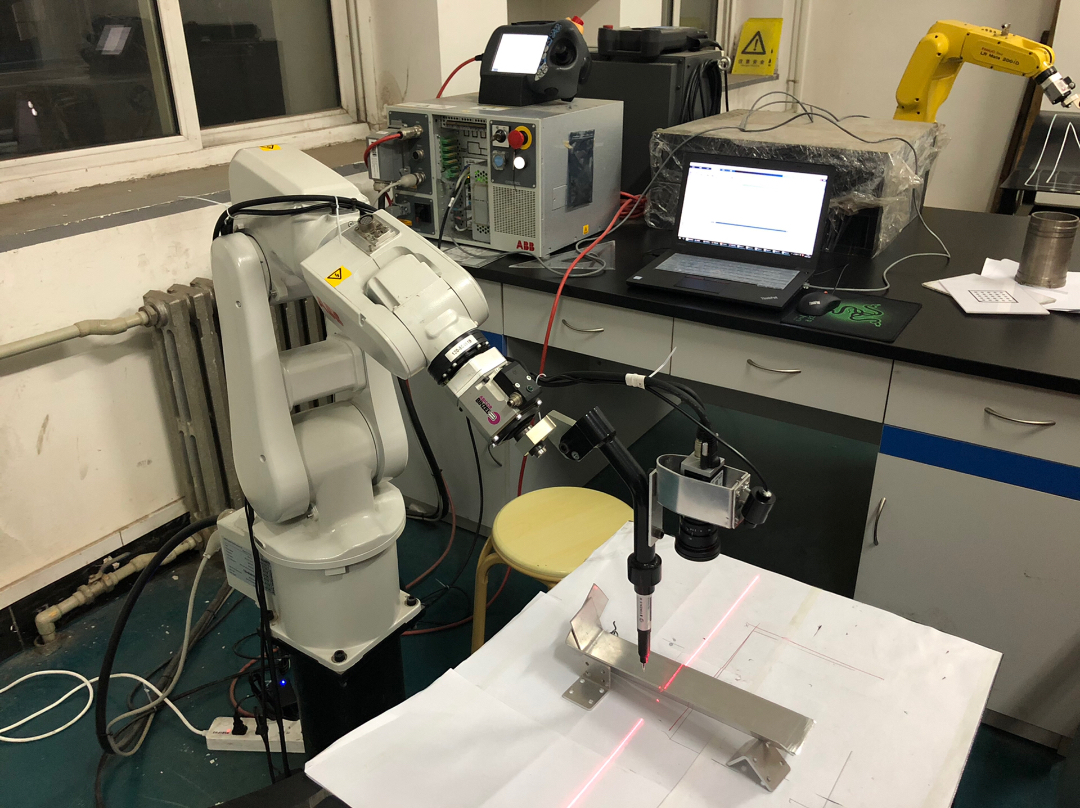
焊缝跟踪 abb机器人二次开发上位机由C#+halcon联合编程提供源码讲解,abb编程及通讯、工业相机标定、halcon图像处理、C#与halcon联合编程等。
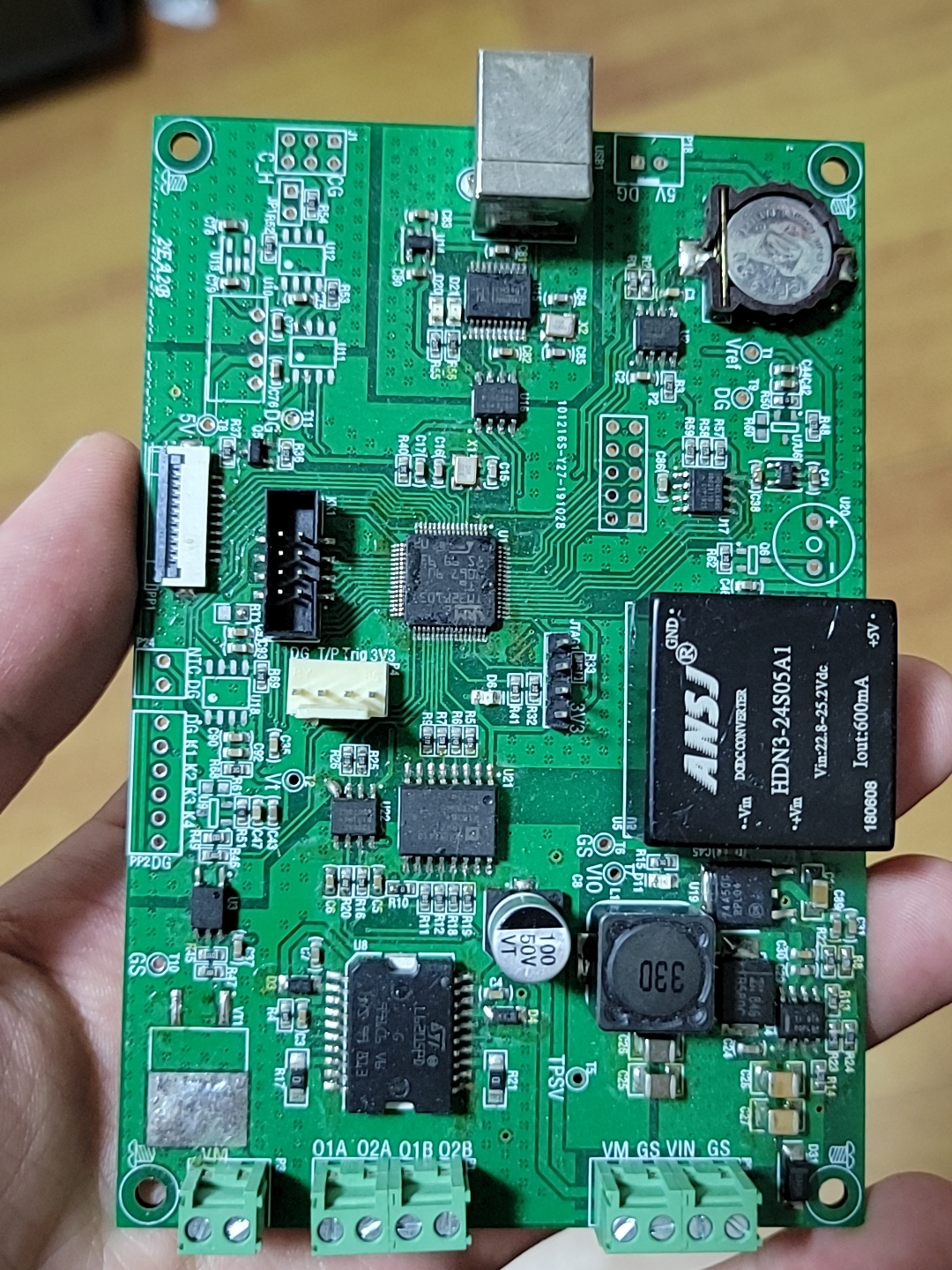
这款驱动板的核心就是L6205芯片啦。L6205是一款专门用于直流电机驱动的芯片,它可以轻松实现对两路直流电机的高效驱动。它具有很多优点,比如能够提供较大的驱动电流,从而让电机转得更有力;还具备过流保护功能,能有效保护电机和驱动板,避免因电流过大而损坏。
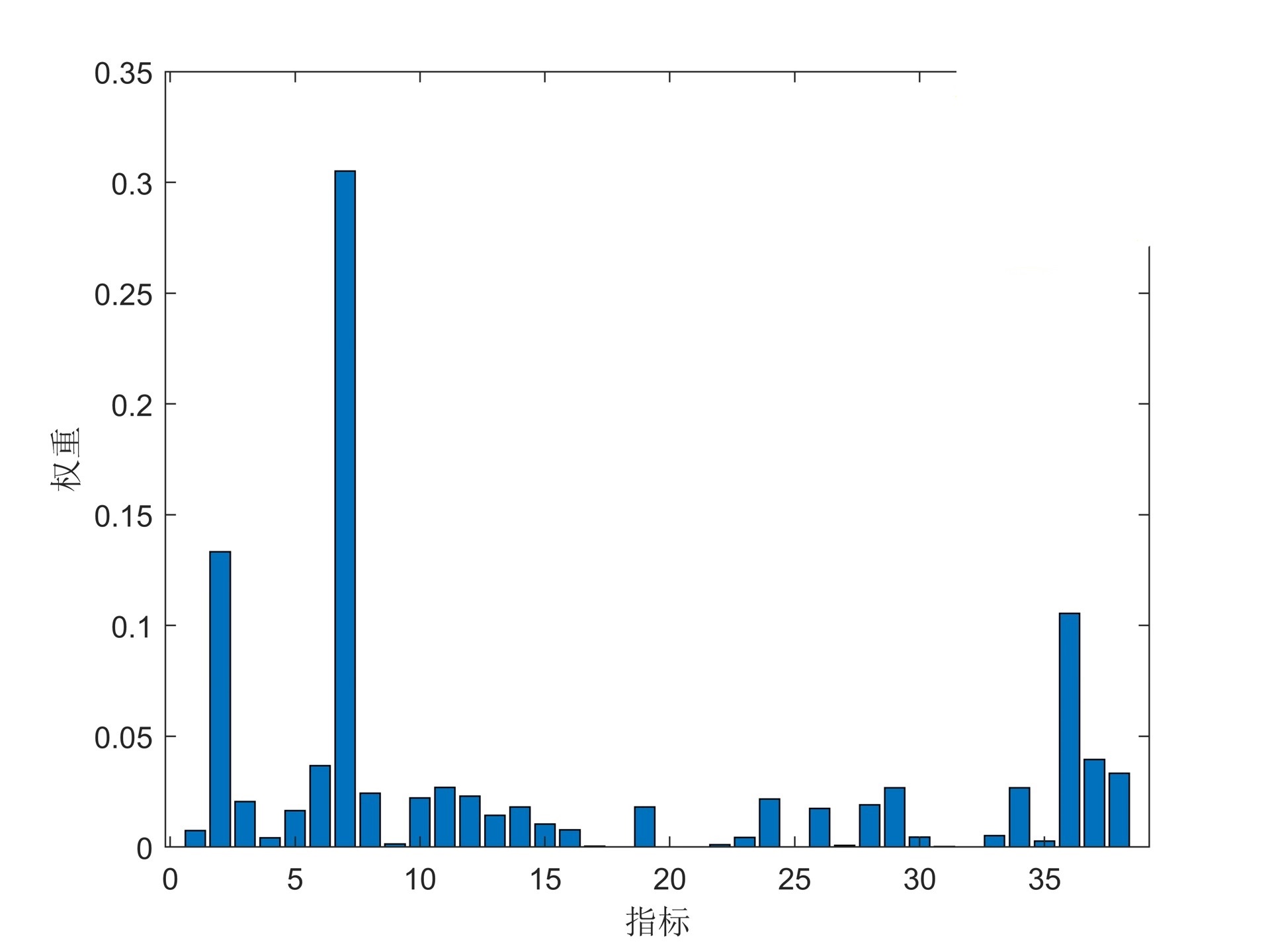
critic法计算指标权重根据指标数据(每行是一个样本,每列是不同变量)计算各个指标的权重值并画图展示MATLAB代码,备注清晰,易于使用在数据分析的世界里,确定不同指标的权重是一项关键任务。今天咱们来聊聊用Critic法计算指标权重,并且用MATLAB实现这个过程,最后还把结果画成图展示出来。
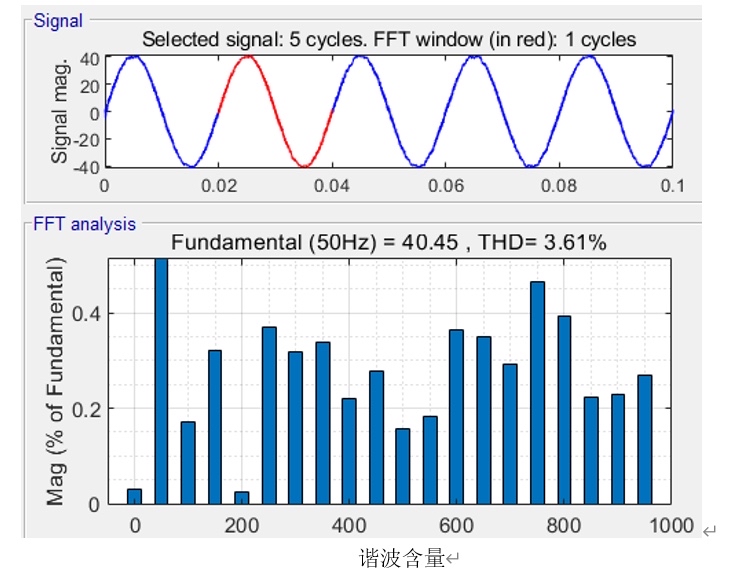
从理论上来说,电网电压全前馈方案为解决电网电压谐波引起的电流畸变问题提供了新的方向,后续还需要进一步通过实际的实验和更详细的代码实现去验证其在不同工况下的有效性和稳定性。对于带有LCL滤波器的并网逆变器,采用电容反馈和注入电流的双回路控制策略可以有效地抑制谐振,但不能减小电网电压谐波引起的电流畸变。对于带有LCL滤波器的并网逆变器,采用电容反馈和注入电流的双回路控制策略可以有效地抑制谐振,但不能减
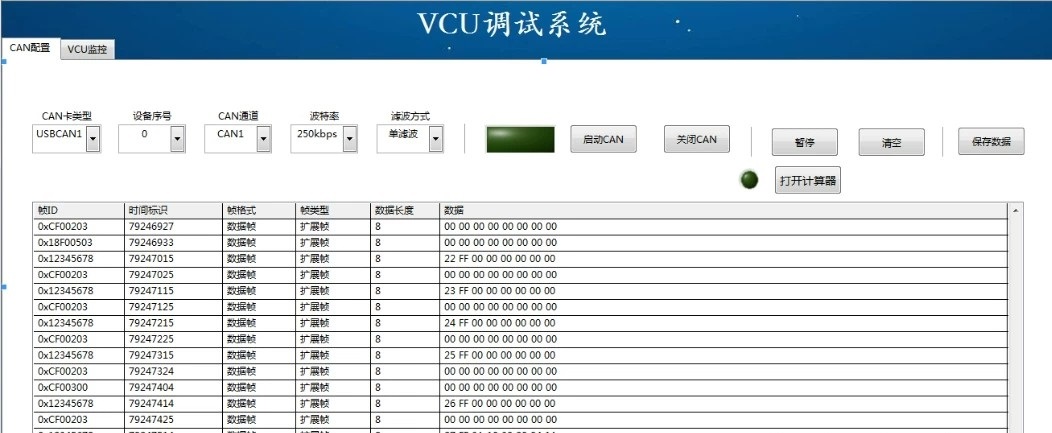
labview can通讯上位机,调用周立功的库,能够实现基本通讯,默认配置了USBCAN1和USBCAN2,适合小白上手,有库文件说明文档。在工业控制和汽车电子等诸多领域,CAN(Controller Area Network)总线通讯应用极为广泛。今天咱就来聊聊如何用LabVIEW搭建一个CAN通讯上位机,而且是调用周立功的库,超适合小白上手哦!
(这里可以插个手绘感的接线图,比如本地箱里的PLC、电源、浪涌保护器、接触器、按钮按顺序排,用彩色线条连电源220V、直流24V、输入输出,彩色线条黑白打印的话会有深浅区别,也能看清)现在这套“半成品包”已经卖给了张叔的合作社,南头那片10亩玉米田已经用上了,上周张叔还拍了个视频给我——老伴在城里做饭,他在村头下棋,手机对着MCGS的实时画面看,湿度降到32%的时候自动开了总阀,20分钟后自动关了
这个密码锁可不简单,它有着一套完善的操作逻辑。初始密码设定为 222222,当输入正确密码时,绿灯亮起,锁打开,同时蜂鸣器会短响一声。而且,如果你想重新设置密码,只需再次输入密码,然后点击“开锁”就行。要是密码输入错误,蜂鸣器就会长响,给你提个醒。另外,它配备了 24C02 密码存储模块,能把密码稳稳地储存起来。显示部分采用的是 LM016L 液晶显示器,操作起来一目了然。还具备清除功能和更改密码
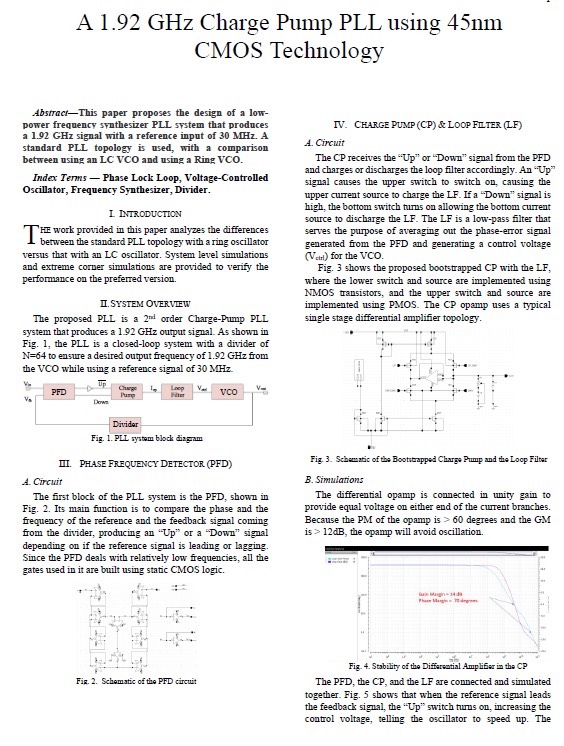
最后给个调试建议:用频谱仪观察VCO输出时,如果看到频率在1.92GHz附近"呼吸"(轻微波动),别慌,这是环路正在收敛的表现。最近在折腾射频电路的时候,突然发现1.9GHz附近的频段真是个神奇的存在——5G、WiFi6、蓝牙都在这个区域蹦迪。别急着关页面,重点在后面——这个频率要和VCO输出分频后的信号做相位比较,就像让两个跑步的人保持步调一致。实际电路中,变容二极管的C-V曲线可能更复杂,但原
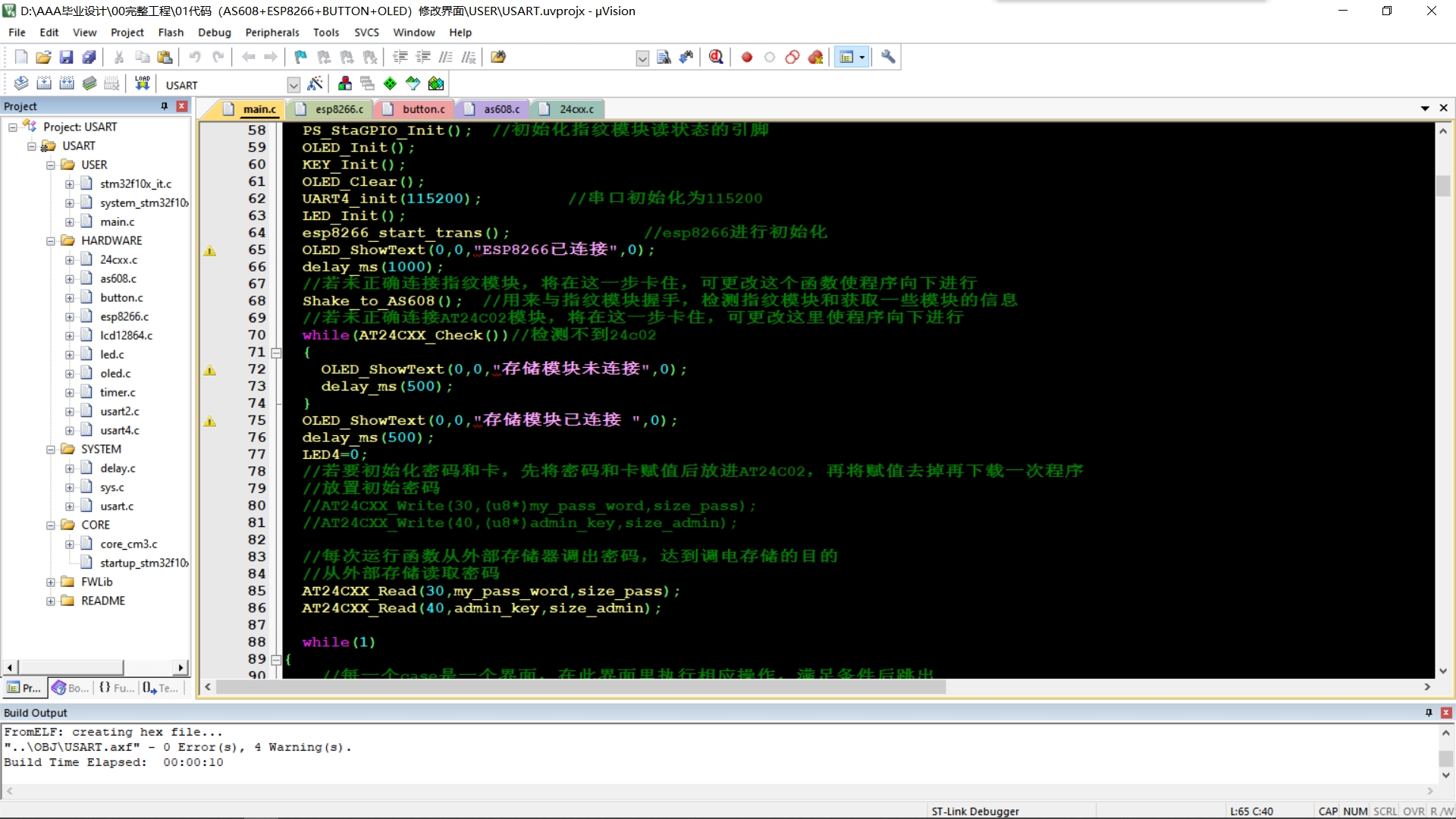
基于stm32单片机的电子密码锁,AS608指纹识别,ESP8266WIFI远程控制,数字密码解锁,多次错误锁定,管理员权限,OLED显示界面,完整工程代码,如视频展示完美运行,注意是代码和APP,代码和APP,代码和APP。基于stm32单片机的电子密码锁,AS608指纹识别,ESP8266WIFI远程控制,数字密码解锁,多次错误锁定,管理员权限,OLED显示界面,完整工程代码,如视频展示完美运
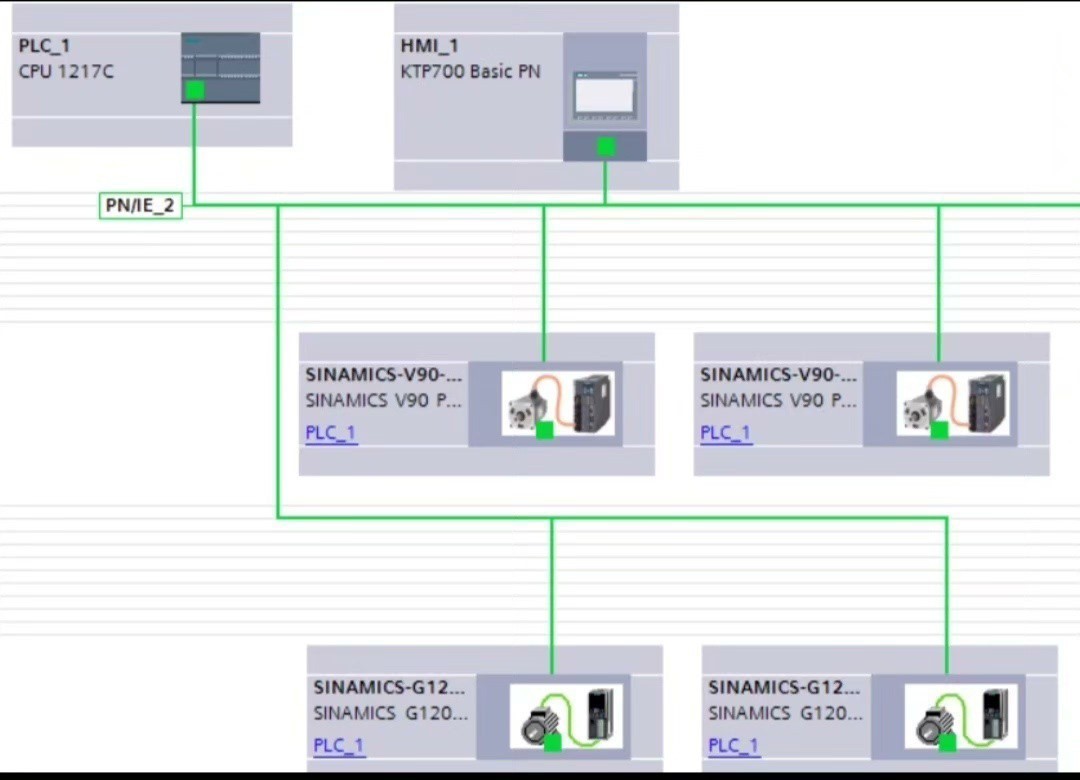
2台西门子变频器G120 Profinet通讯,4台伺服V90 PN口通讯,变频器和伺服已写好FB块,可以方便参考调用,有电气图纸/变频器设置说明/详细注释等项目文件程序设计版本TIA V14。2台西门子变频器G120 Profinet通讯,4台伺服V90 PN口通讯,变频器和伺服已写好FB块,可以方便参考调用,有电气图纸/变频器设置说明/详细注释等项目文件程序设计版本TIA V14。与G120变