- @oBxkQwKTLam
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
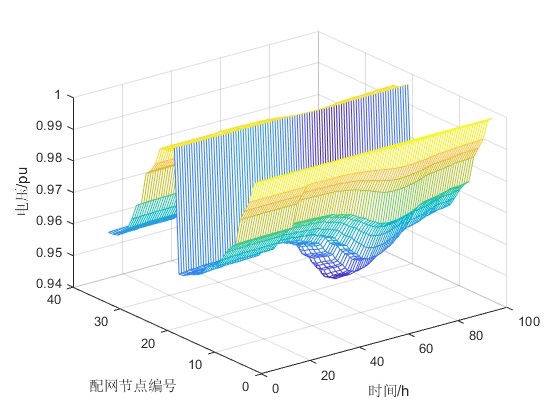
通过融合动态路阻、温度-速度-耗电特性、M/M/c 排队论、时序蒙特卡洛(MC)模拟与三相潮流计算,输出 24 h×32 节点的高时空分辨率充电负荷曲线及电压分布,为充电设施布局、配网扩容、需求响应策略提供量化依据。路网-电网耦合、排队论、温度耗电量、配电网潮流,通过时序蒙塔卡洛模拟,考虑路阻信息、温度、排队论时间,去除规模影响,配有相关文献。路网-电网耦合、排队论、温度耗电量、配电网潮流,通过时
cpfem 疲劳损伤子程序,主要应用于晶体塑性领域,处理材料在疲劳载荷下的损伤模拟。晶体塑性本构模型考虑了晶体材料的各向异性以及晶体滑移等微观机制,而这个疲劳损伤子程序就是在此基础上,进一步分析材料在循环载荷作用下是如何产生损伤、累积损伤,直至失效的。
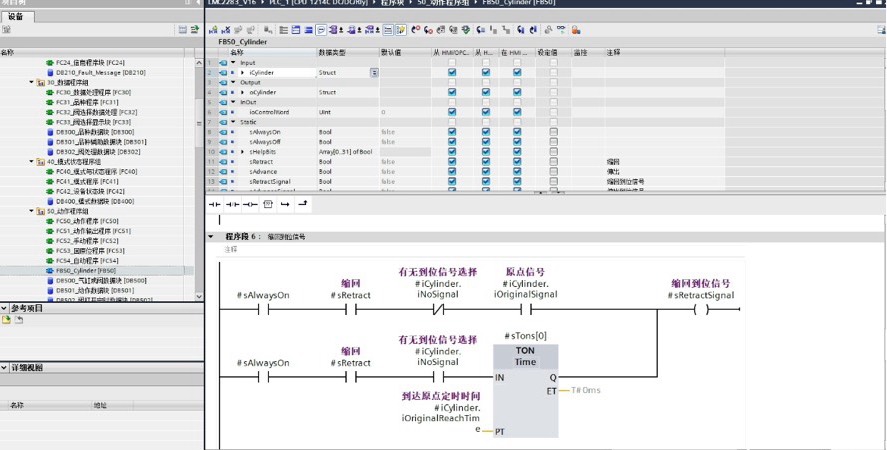
电气图里的线号标注方式更暗藏玄机:比如"1L+_K1"表示24V电源第一回路接的继电器,配合PLC里的符号寻址,查线时能直接在程序里反推物理位置。PLC程序设计的标准,包括程序结构如何划分,动作流程图怎么画,回原点应该怎么做,程序的标签,注释等命名标准,一些安全互锁动作如何写程序。PLC程序设计的标准,包括程序结构如何划分,动作流程图怎么画,回原点应该怎么做,程序的标签,注释等命名标准,一些安全互
本文档从工程视角拆解了“语音 → 身份”映射链路的每一环,开发者可在不触碰核心代码的前提下,按图索骥完成调参、扩展与跨平台迁移。本文档围绕一套基于 MFCC 特征 + GMM 建模的说话人辨认(Speaker Identification)系统展开,阐述其数据流、模块边界、关键算法选择及扩展策略,帮助开发者快速理解“代码到底在做什么、为什么这么做、还能怎么做”。Matlab语音识别,使用GMM和M
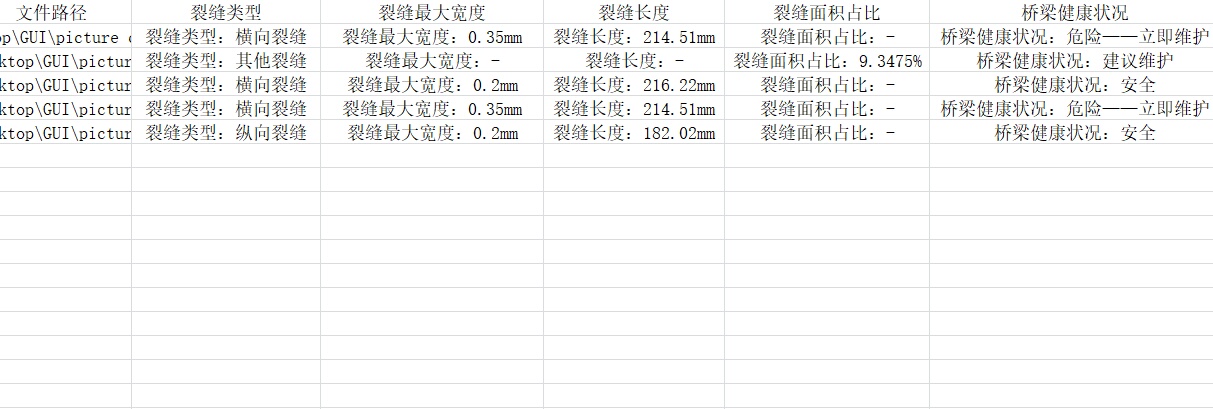
接下来,程序调用`extractFeature`函数来提取图像的特征向量。基于MATLAB和机器学习(向量机)的裂缝检测(识别)系统程序,带GUI界面,对裂缝主要参数(长度,宽度,面积)进行计算,已经训练好分类器,包含裂缝图像训练集和测试集,可以完美运行(带注释),结果可保存在Excel中。基于MATLAB和机器学习(向量机)的裂缝检测(识别)系统程序,带GUI界面,对裂缝主要参数(长度,宽度,面
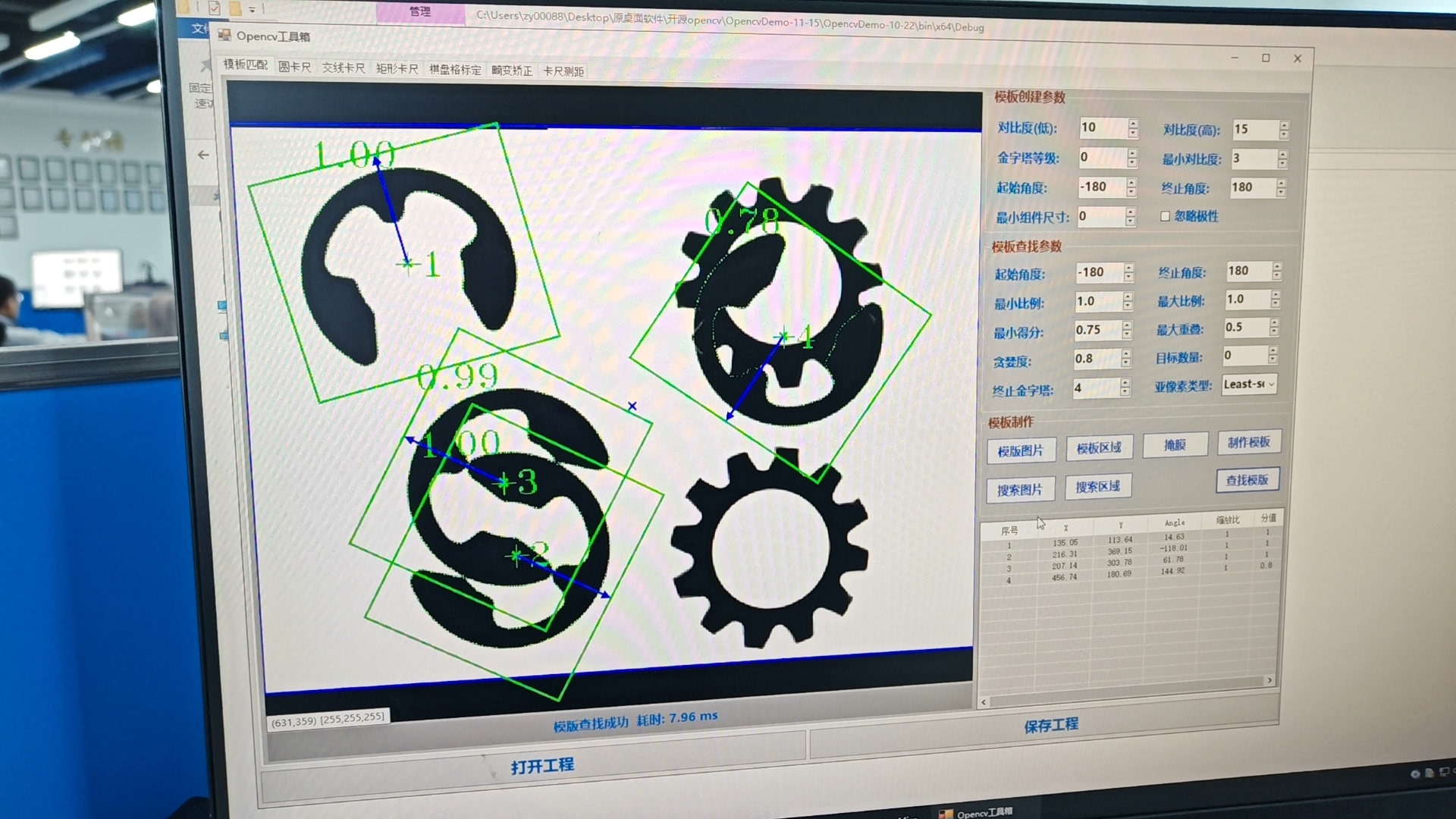
本文介绍一套基于OpenCV(通过 OpenCvSharp 封装)与构建的多功能机器视觉工具箱。该工具箱集成了模板匹配、圆/矩形/直线卡尺测量、交点检测、距离测量、相机畸变校正等核心视觉功能,适用于工业自动化、精密测量、图像分析等场景。基于Opencv C# 开发的圆卡尺、矩形卡尺,直线卡尺、距离测量工具源码,代码运行正常,由实际运行项目中剥离,含测试图片,包含一个强大的视觉控件源码,控件仿hal
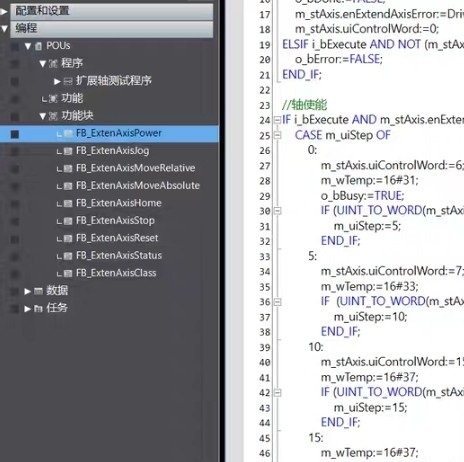
欧姆龙NJ/NX使用POD映射拓展轴功能块与应用案例功能块内部可查看,可编辑,此功能程序在实际项目中稳定使用可以在原有轴数(8.16.32.64)基础上实现更多轴的控制,如10轴35轴67轴等。根据实际项目对ECAT总线刷新周期需求而定,程序比较经典在自动化控制领域,欧姆龙的NJ/NX系列控制器一直表现出色。今天咱们就唠唠其中一个超实用的功能——使用POD映射拓展轴功能块及其精彩应用案例。
更新公式看着像加权平均,实际上gamma在这里扮演软分配的角色,比硬分配的k-means温柔多了。这里藏着三个关键点:GMM负责像素强度建模,MRF处理空间连续性,EM算法当粘合剂。算法运行环境为MATLAB R2021b,使用期望最大化(EM)算法进行图像分割,并同时依赖于高斯混合模型(GMM)和马尔可夫随机场(MRF)模型。算法运行环境为MATLAB R2021b,使用期望最大化(EM)算法进
裂隙这玩意儿得用离散裂隙网络(DFN)方法建模,直接在Geometry里用线段画几条随机分布的裂缝。要是老板问起计算时间,就说工作站跑了8小时——其实偷偷用了简化模型先试算,这个秘籍一般人不告诉。裂隙岩体里的地热开采就像在石头缝里捞火锅底料——既要保持岩体结构不崩,又要让热量跟着流体跑得欢。这代码在模型中心区域生成10条随机走向的裂隙,注意长度控制在模型尺寸的1/5以内,防止边界效应捣乱。二维模型
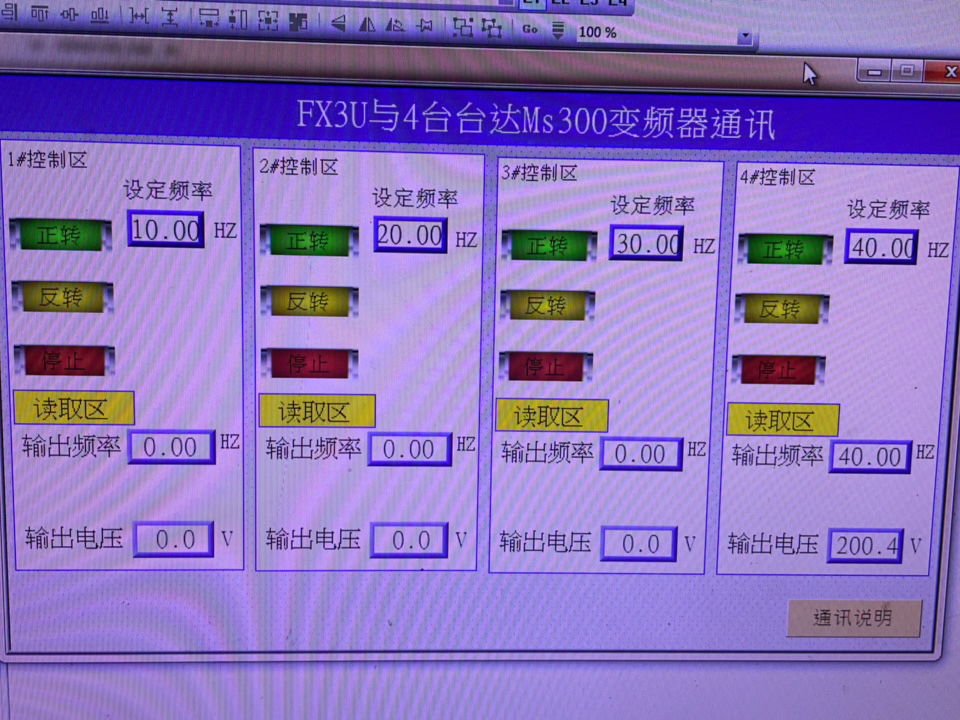
三菱FX3U与4台台达Ms300变频器通讯程序通讯说明:用三菱FX3U的PLC实现与4台台达ms300变频器modbus通讯器件:三菱FX3U PLC,三菱FX3U 485BD通讯板,台达Ms300变频器,昆仑通态触摸屏,附送威纶通触摸屏程序功能:触摸屏上设置每台频率,监控每台输出频率,输出电压,控制启停,正反转。说明:已经通过测试运行可行。程序带有注释,接线方式,参数设置最近搞了个三菱FX3U与