- @iCjMuKUypQs
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
理解其寄存器映射、优先级模型、跨编译器封装、启动握手,是阅读任何一份无感 FOC、滑模观测器、Vf 启动源码的前提;CMSIS-CM3 不是“可有可无的宏集合”,而是把 Cortex-M3 硬件能力完整、安全、高效地“交棒”给电机控制算法的最短路径。无感Foc电机控制,算法采用滑膜观测器,启动采用Vf,全开源c代码,全开源,启动顺滑,很有参考价值。无感Foc电机控制,算法采用滑膜观测器,启动采用V
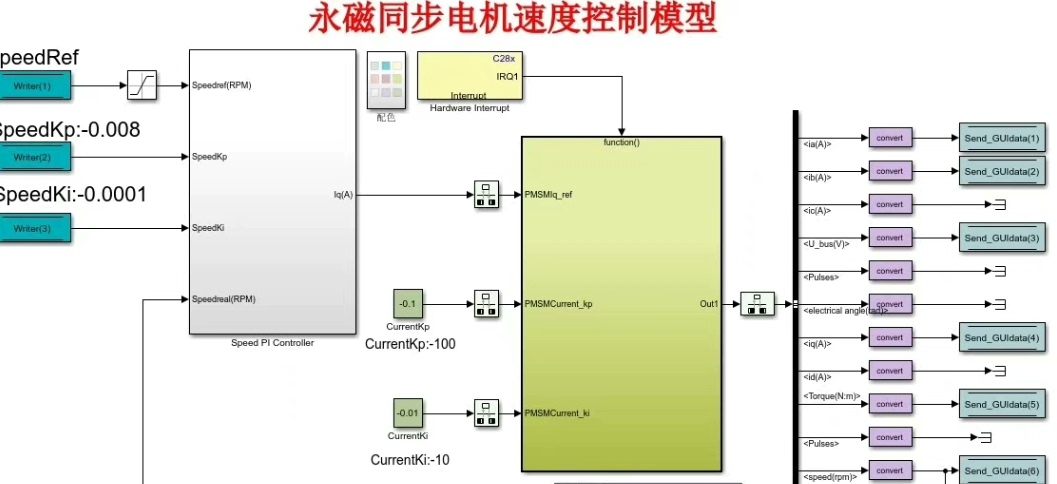
不过需要特别注意,Simulink里的数据类型设置必须与DSP的Q格式对应,否则生成的代码会出现诡异的数值溢出。主控芯片dsp tms320f28335,基于Matlab Simulink开发的嵌入式模型,模型可自动生成ccs工程代码,生成的代码可直接运行在主控芯片中。主控芯片dsp tms320f28335,基于Matlab Simulink开发的嵌入式模型,模型可自动生成ccs工程代码,生成的
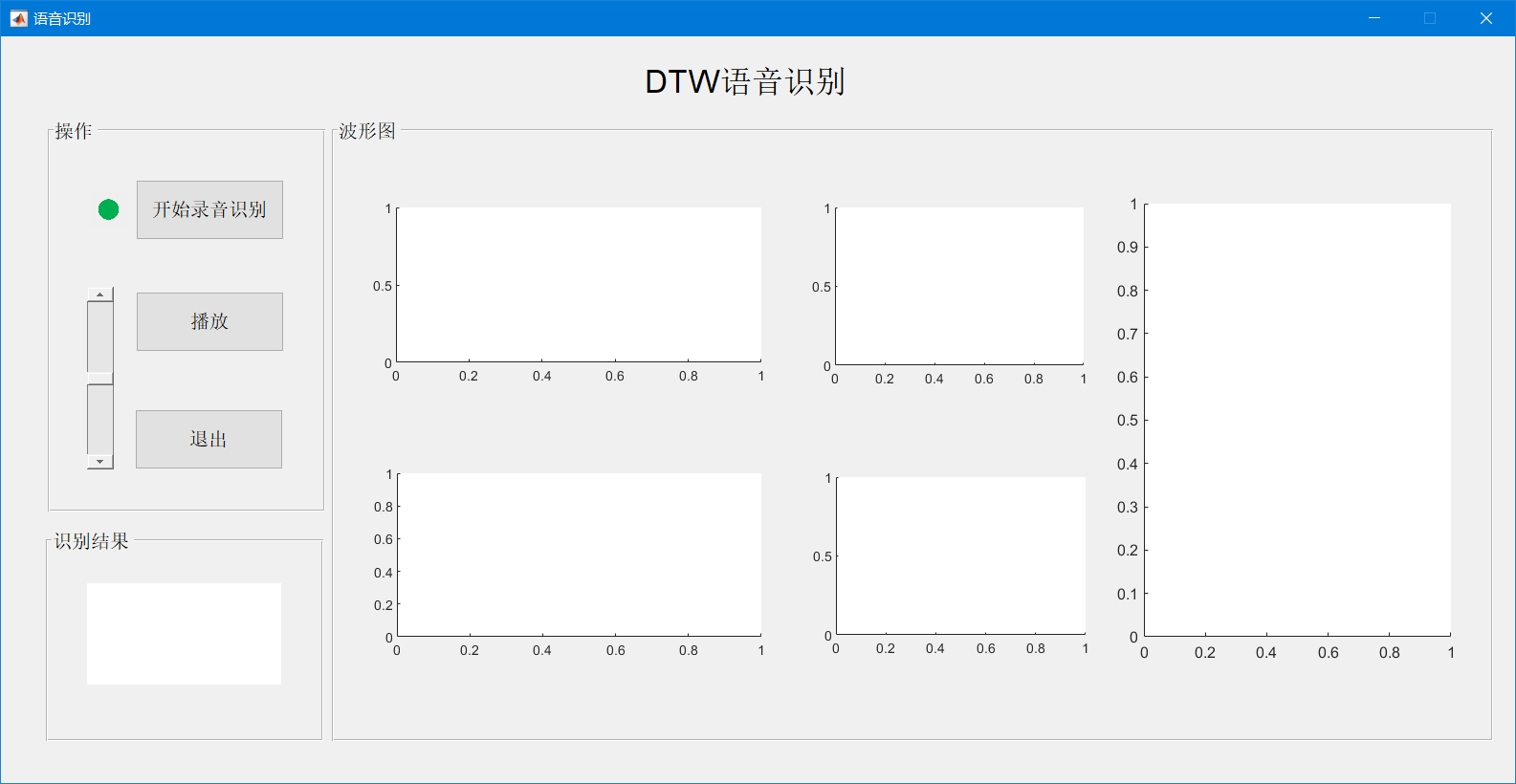
本系统是基于MATLAB平台开发的特定人孤立词语音识别系统,核心功能为识别0-9共10个数字语音。系统采用动态时间规整(DTW)算法实现语音特征匹配,结合梅尔频率倒谱系数(MFCC)提取语音关键特征,通过图形用户界面(GUI)提供直观的人机交互,涵盖语音采集、预处理、特征提取、模板训练与识别全流程,可满足基础数字语音识别场景的功能需求。
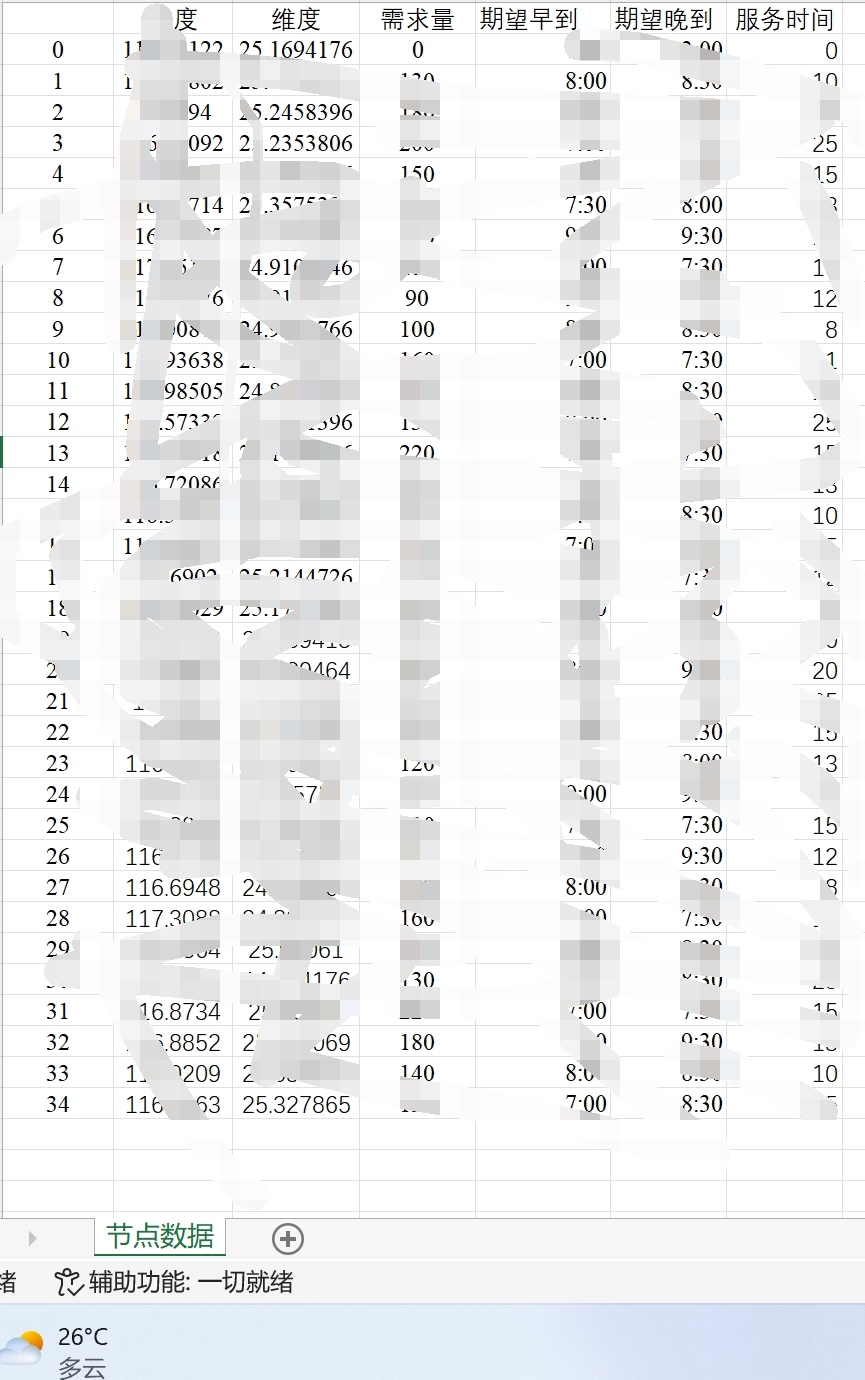
如果你的配送点是经纬度,把dist的计算换成球面距离公式就行,或者直接用osmnx拉取实际路网的行驶时间,改一下的计算逻辑就好。如果要算综合成本(油费+人力),直接把改成totalcost += dist * 油费单价就行,改起来毫无压力。反正这个脚本我自己用了大半年,不管是公司内部的配送排班还是帮朋友做的小物流项目都能用,真的是改改数据就能出结果,比手动排靠谱一万倍。
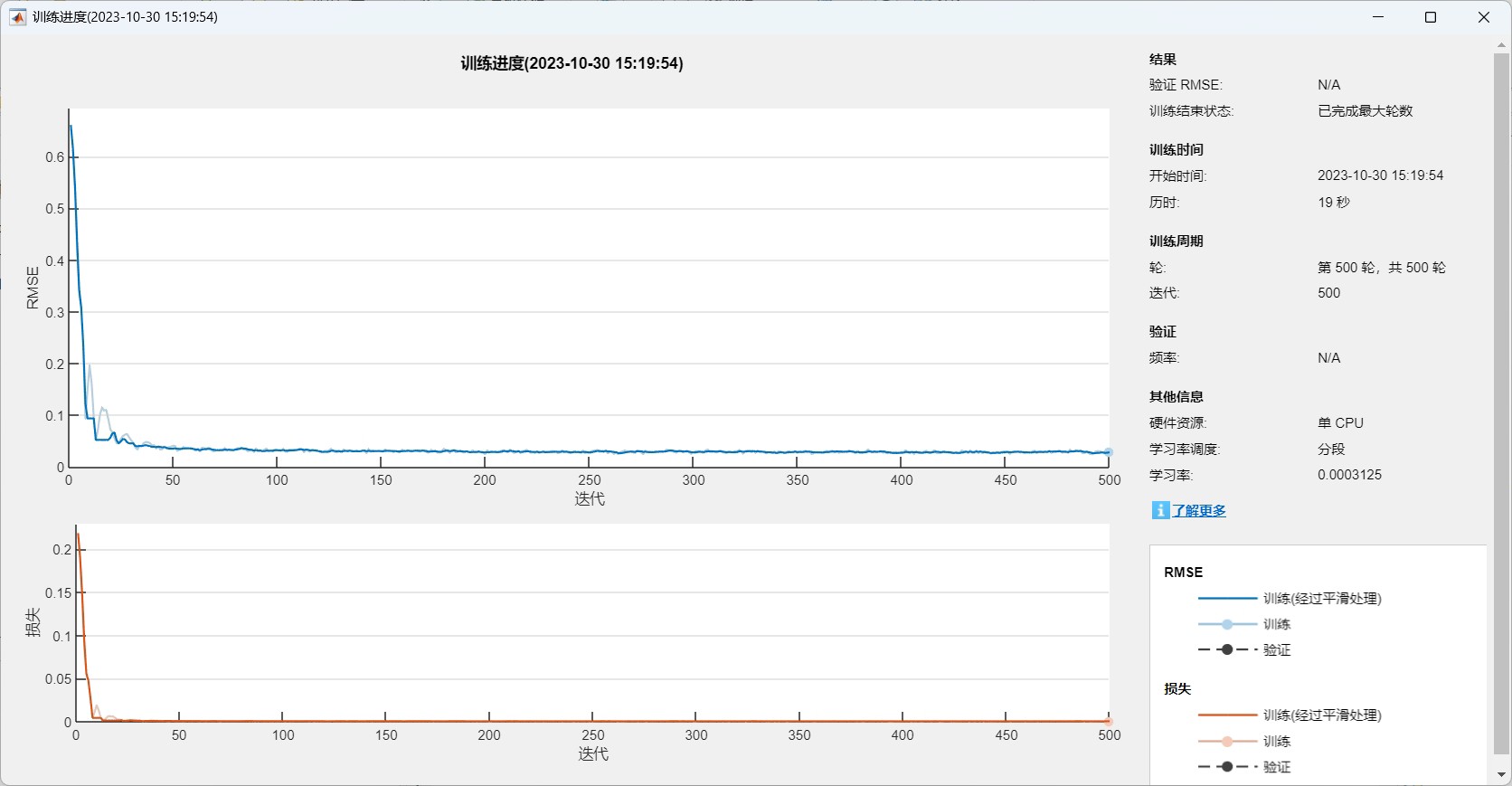
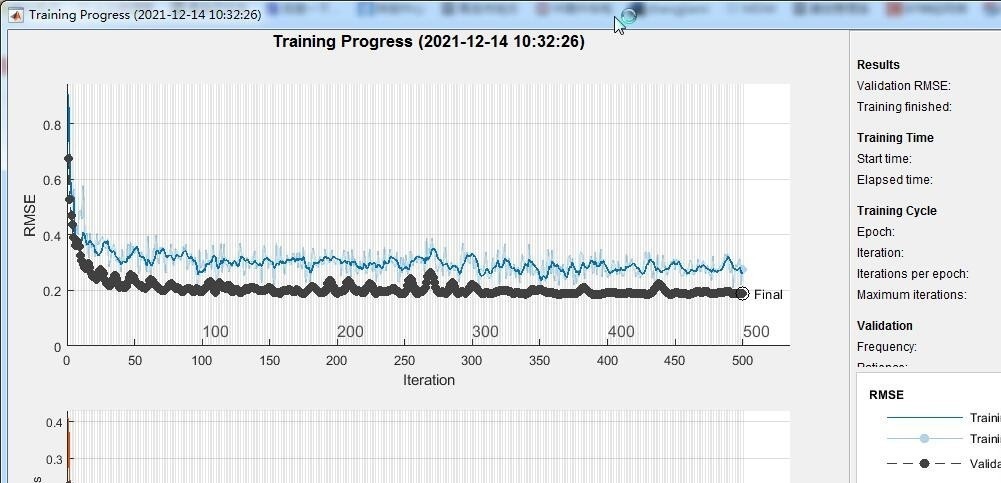
长短期记忆网络(LSTM)是一种特殊的循环神经网络(RNN),它能有效解决传统 RNN 在处理长序列时的梯度消失或梯度爆炸问题。简单来说,LSTM 就像是一个聪明的记忆器,能记住长序列中的重要信息。代码分析:这里我们使用了 Keras 库来构建 LSTM 模型。首先创建一个顺序模型,然后添加一个包含 50 个神经元的 LSTM 层,输入形状由timesteps和input_dim决定。最后添加一个
PSO-CNN,粒子群优化算法优化CNN网络的超参数实现数据预测,时间序列预测,多输入单输出系统预测,单输入单输出系统的预测,多输入多输出系统的预测,都可以,预测精度高于CN在数据预测领域,如何提升预测精度一直是大家关注的重点。今天咱们来聊聊用粒子群优化算法(PSO)优化卷积神经网络(CNN)超参数,以此实现各种系统的数据预测,包括时间序列预测,以及单输入单输出、多输入单输出和多输入多输出系统的预
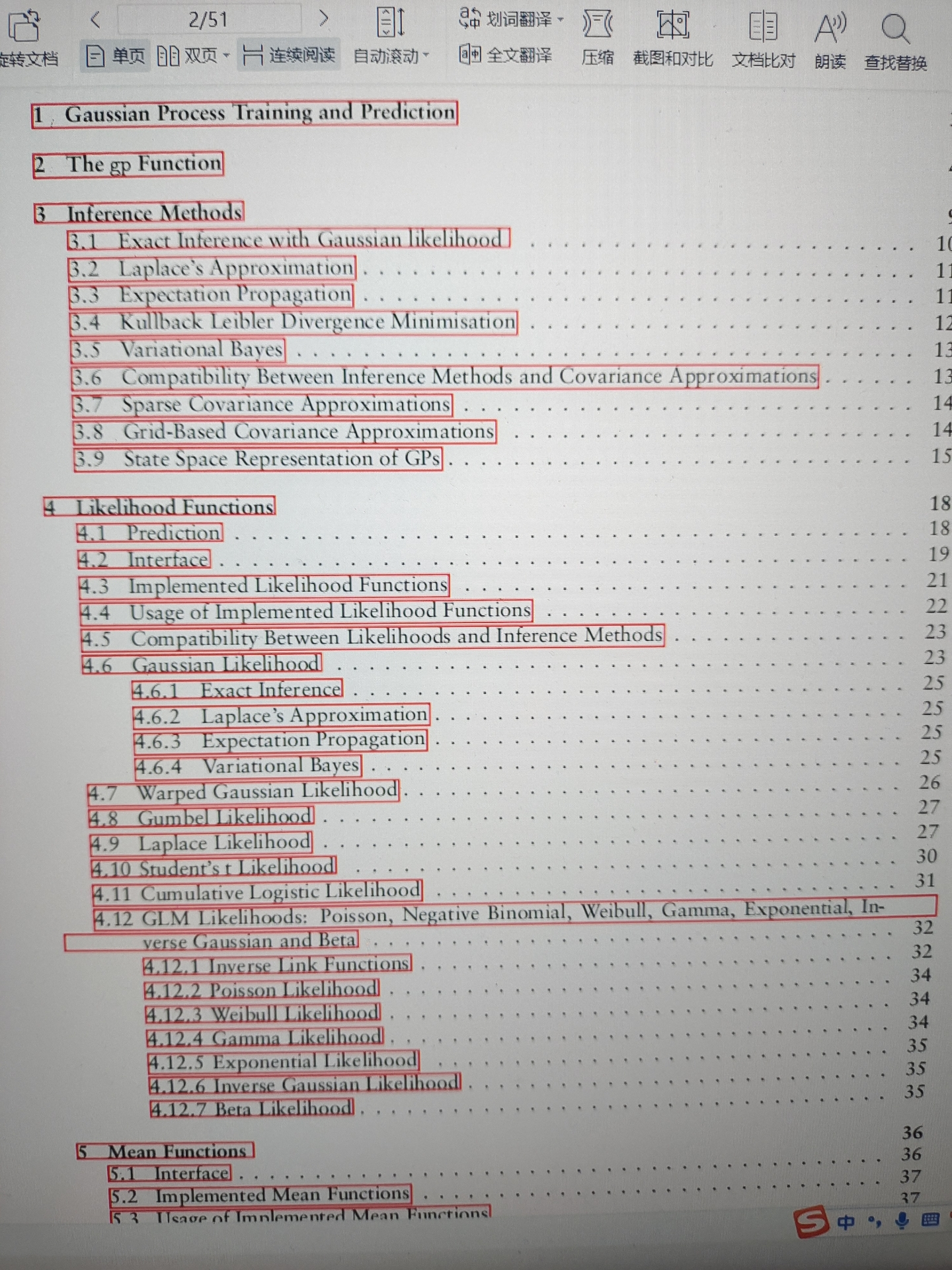
matlab高斯回归过程工具箱高斯过程回归进行拟合和预测,比神经网络和支持向量机学习速度更快可进行多因素单输出和多因素多输出直接替换自己data,操作简单,付有工具箱说明书上个月帮同组做化工热力学小实验拟合的研究生师姐,差点把自己的联想小新砸实验室桌上——SVM调C调gamma跑了一晚上网格搜索,结果换个批次重复实验,预测误差忽上忽下;换BP吧,小批量数据(才20组)神经网络总觉得学了个寂寞,好不
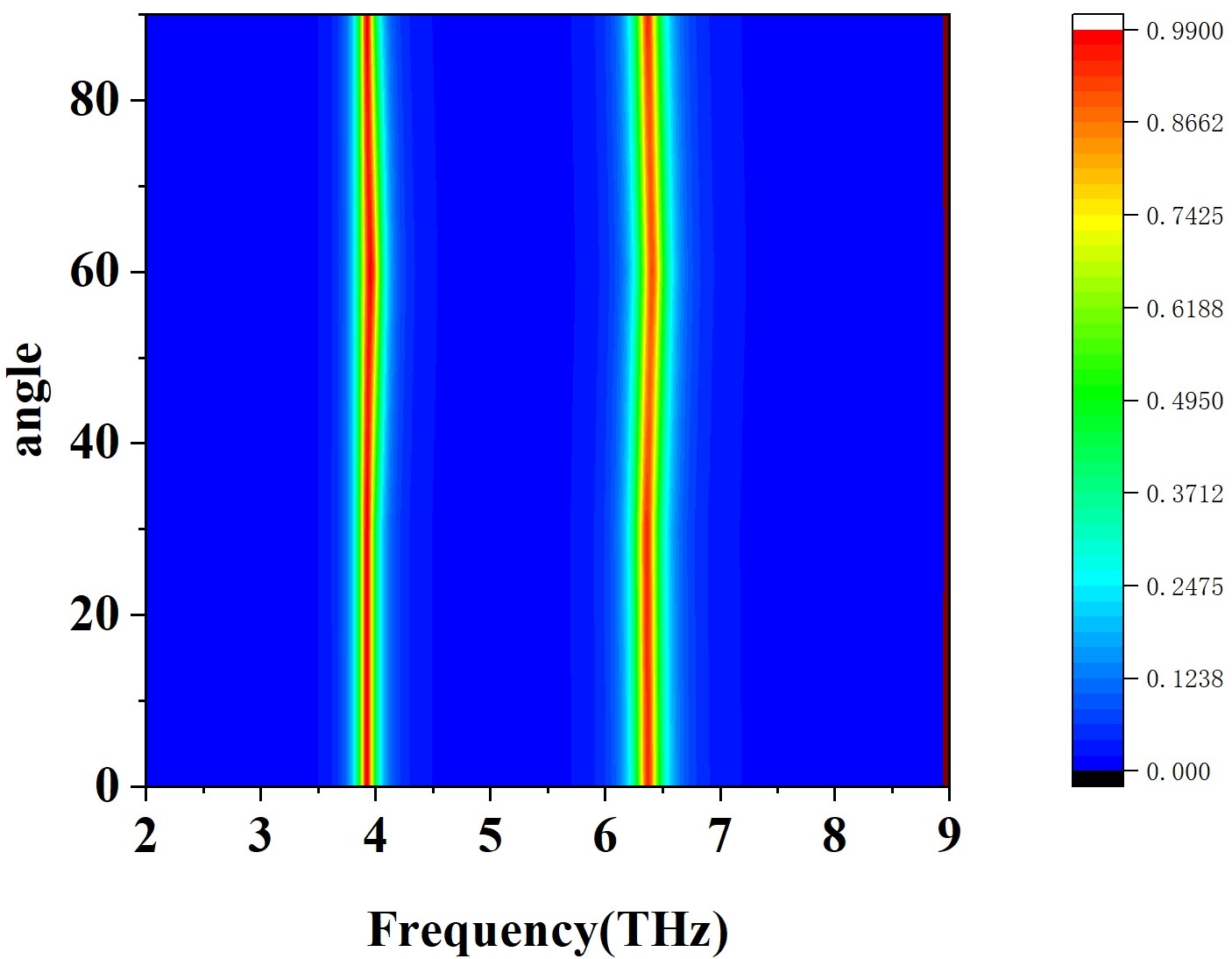
最后看1D Results里的Surface Current和Farfield(虽然加了PEC地板Farfield基本为0),还有Field Monitor里的E-field和H-field分布——5.8GHz时,E-field主要集中在耶路撒冷十字的四个小延伸块和中间横臂竖臂的缝隙里,H-field主要集中在基板内部靠近地板的地方,这就是典型的。r的平方根),用的FR-4基板ε_r4.4、tan
2.Flow3d 软件操作过程介绍详细,包含二次编译文件及过程(含二次编译软件安装包),具有两种模型(各种常见物理模型具有涉及)包含单道,双道,激光功率,扫描速度,蒸汽反冲力,马兰格尼对流,热通量,孔隙,激光光斑直径,表面张力等都有涉及。2.Flow3d 软件操作过程介绍详细,包含二次编译文件及过程(含二次编译软件安装包),具有两种模型(各种常见物理模型具有涉及)包含单道,双道,激光功率,扫描速度
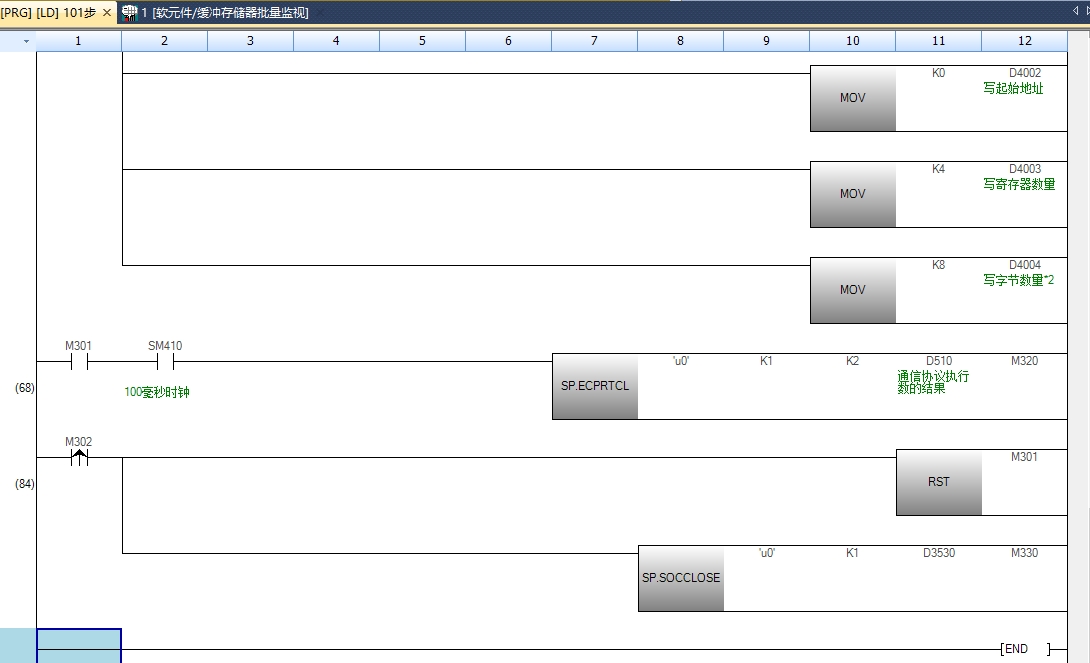
调试时直接监控SD21800的值,0x0000才是正常,出现0x1234之类的赶紧查手册找错误代码。实测发现地址偏移坑:当用04功能码读D100时,实际发过来的地址是十进制100,但有些上位机可能按十六进制处理,这时候要换算成0x64。遇到过最蛋疼的问题——字节顺序。三菱FX5Umodbus tcp协议plc做服务器和客户端案例程序,提供调试工具,程序注解,通讯协议功能的配置。三菱FX5Umodb