- @BBNbQKHXygfU
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
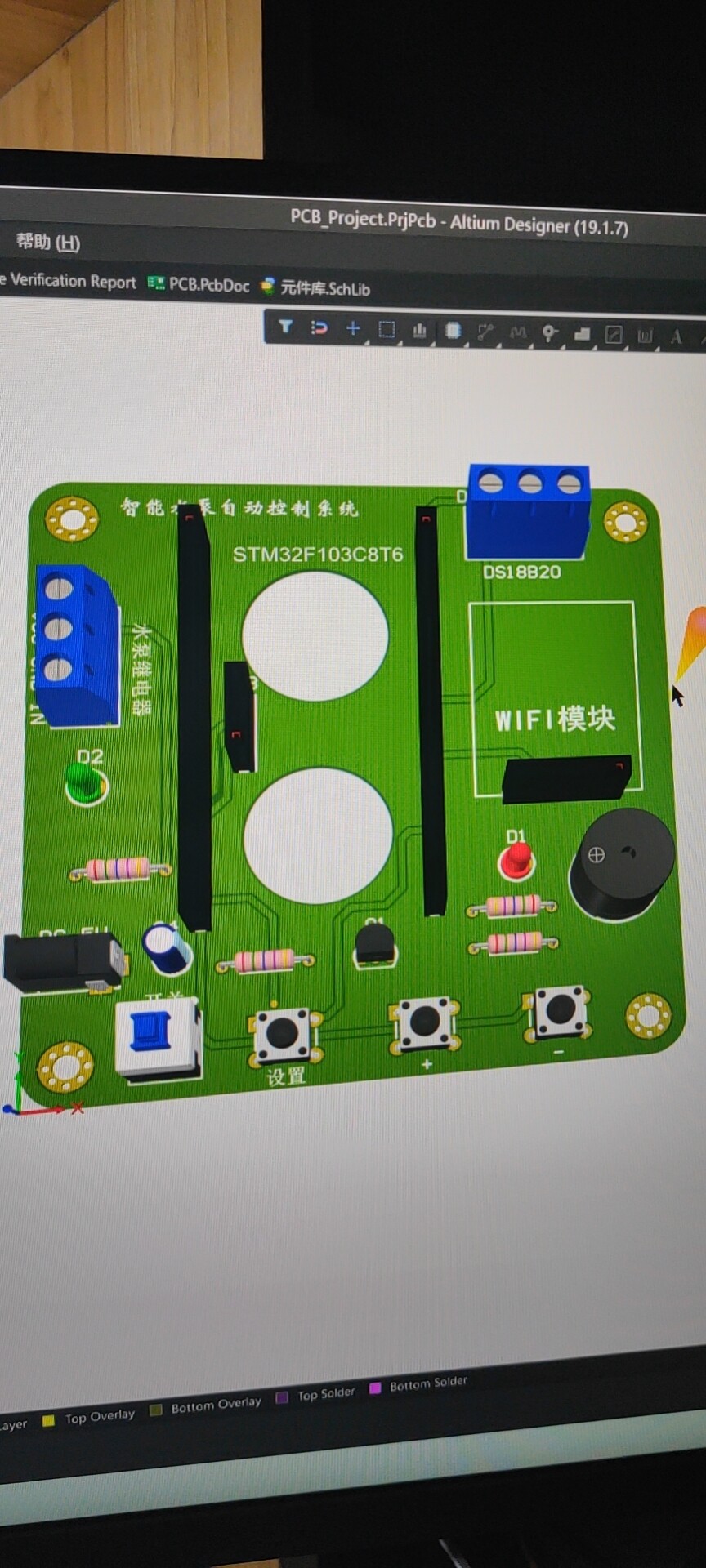
先上干货,整个系统用STM32F103C8T6当大脑,超声波测水位,DS18B20测水温,继电器控制水泵。今天带大家用STM32搞个全自动水位水温控制系统,手机点两下就能远程管理,连阿里云都接上了,卷死隔壁用机械浮球的老王!实测发现继电器物理延迟有0.5秒,所以在逻辑判断里加了软件去抖,比硬件RC电路更省钱。支持: 水位检测、水温检测、水泵控制、水温水位数据分析、已连接阿里云服务器、有手机端APP
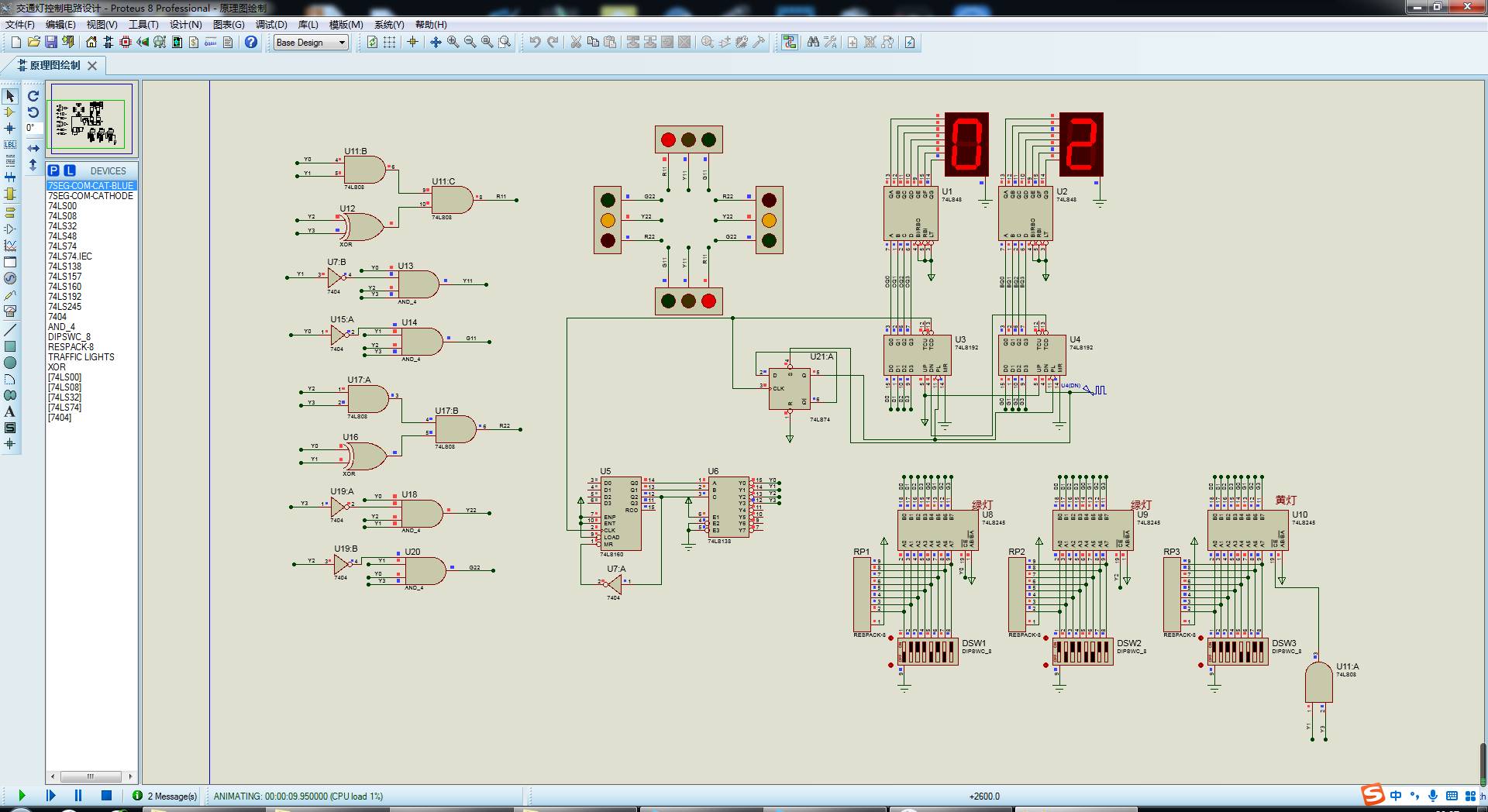
当倒计时归零的瞬间,会触发两个重要动作:通过74LS123单稳态电路产生装载脉冲,同时用74LS161状态计数器切换红绿灯状态。在十字路口的红绿灯里,藏着个有趣的数字世界。在测试过程中,意外发现把状态计数器的Q1接到蜂鸣器,能模拟真实的倒计时提示音。(2)脉冲A通过计数器进行计数,一共计数4次,每次输出一个信号状态,每个信号代表系统状态:东西通行、东西黄灯、南北通行、南北黄灯。(2)脉冲A通过计数
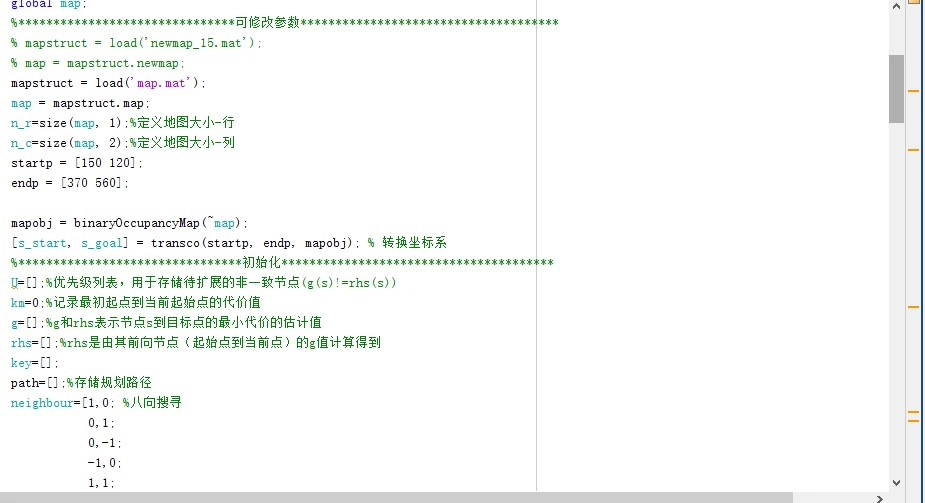
完美注释版,D * lite路径规划算法,应用于无人机,无人车,机器人,无人船的路径规划问题,MATLAB,完美注释版。完美注释版,D * lite路径规划算法,应用于无人机,无人车,机器人,无人船的路径规划问题,MATLAB,完美注释版。运行结果为图一中Yao et al., 2021,黑色的那条曲线,不是红色的那条,只包含D* lite一个算法。运行结果为图一中Yao et al., 2021
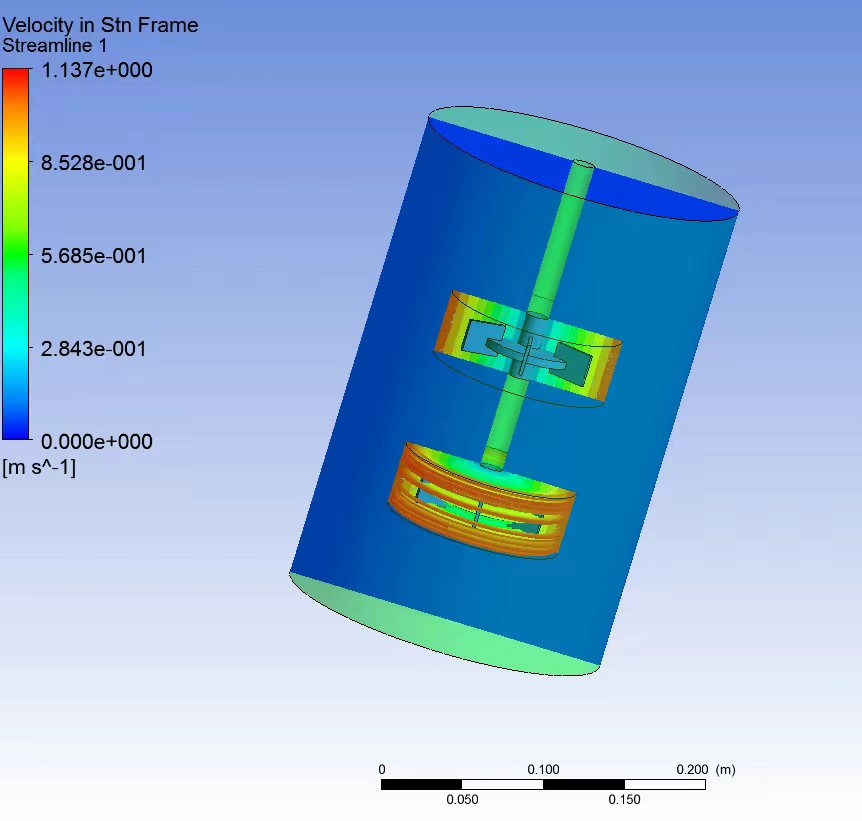
这里有个小技巧:在SpaceClaim里画二维模型时,记得把圆柱直径设置为0.1m,计算域取20D×10D,出口留足发展空间避免回流干扰。有个坑要注意:Fluent默认输出的瞬态数据是单文件,处理大案例时最好在Calculation Activities里设置自动保存多个.dat文件。最后验证阶段拿斯特劳哈尔数说事:计算值0.198与经典文献的0.2误差在1%,说明网格和设置基本靠谱。遇到残差震荡
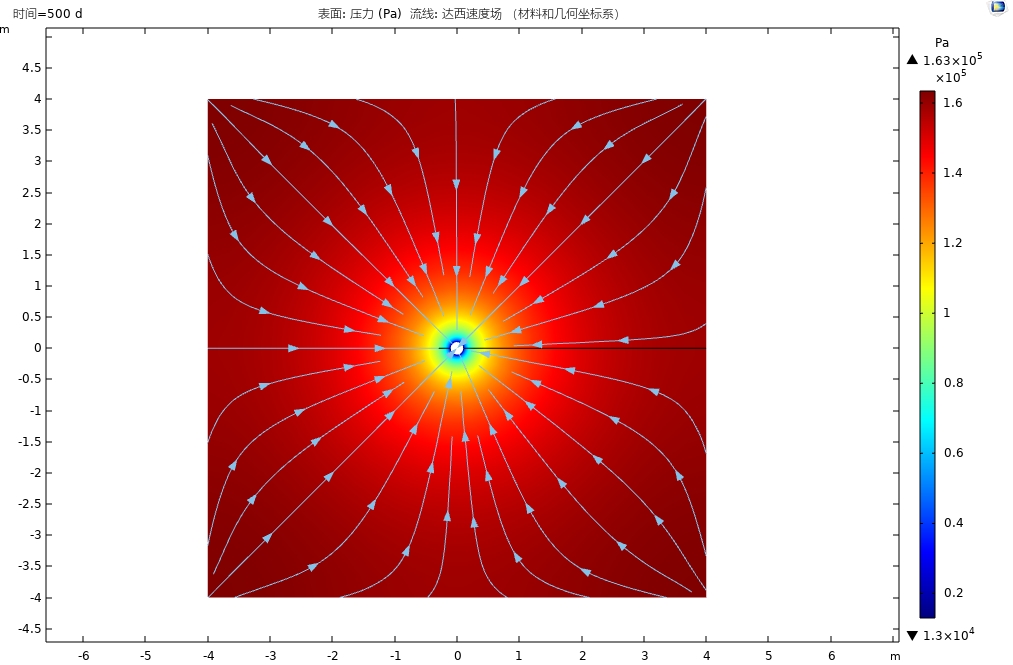
comsol热流固耦合瓦斯抽采,动态渗透率、孔隙率变化模型,煤矿巷道里,钻孔抽采瓦斯时煤岩可不是块死疙瘩。真实场景中温度场、渗流场、应力场三场耦合,渗透率和孔隙率这俩参数会随着煤体变形动态变化。传统固定参数模型就像给活人拍X光片——只能得到静态影像,咱们得让模型动起来才够劲。
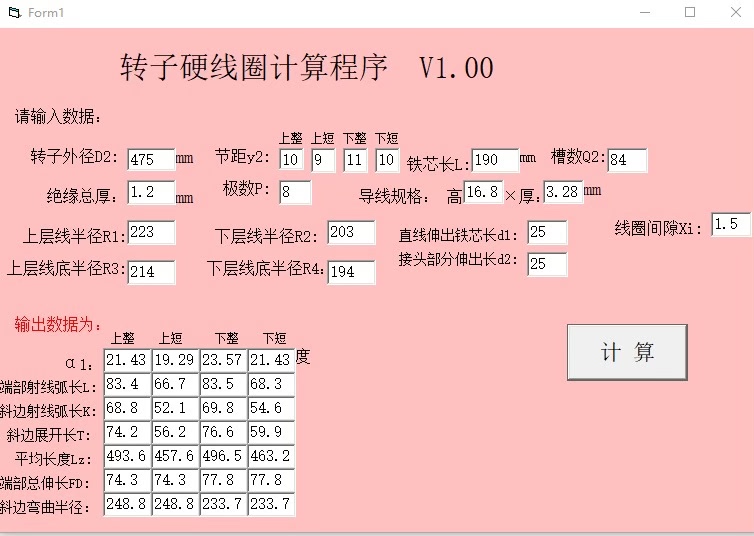
电机转子硬线圈计算程序在电机的世界里,转子硬线圈的精确计算至关重要,它关乎电机的性能、效率以及稳定性。今天就来唠唠这个电机转子硬线圈计算程序。
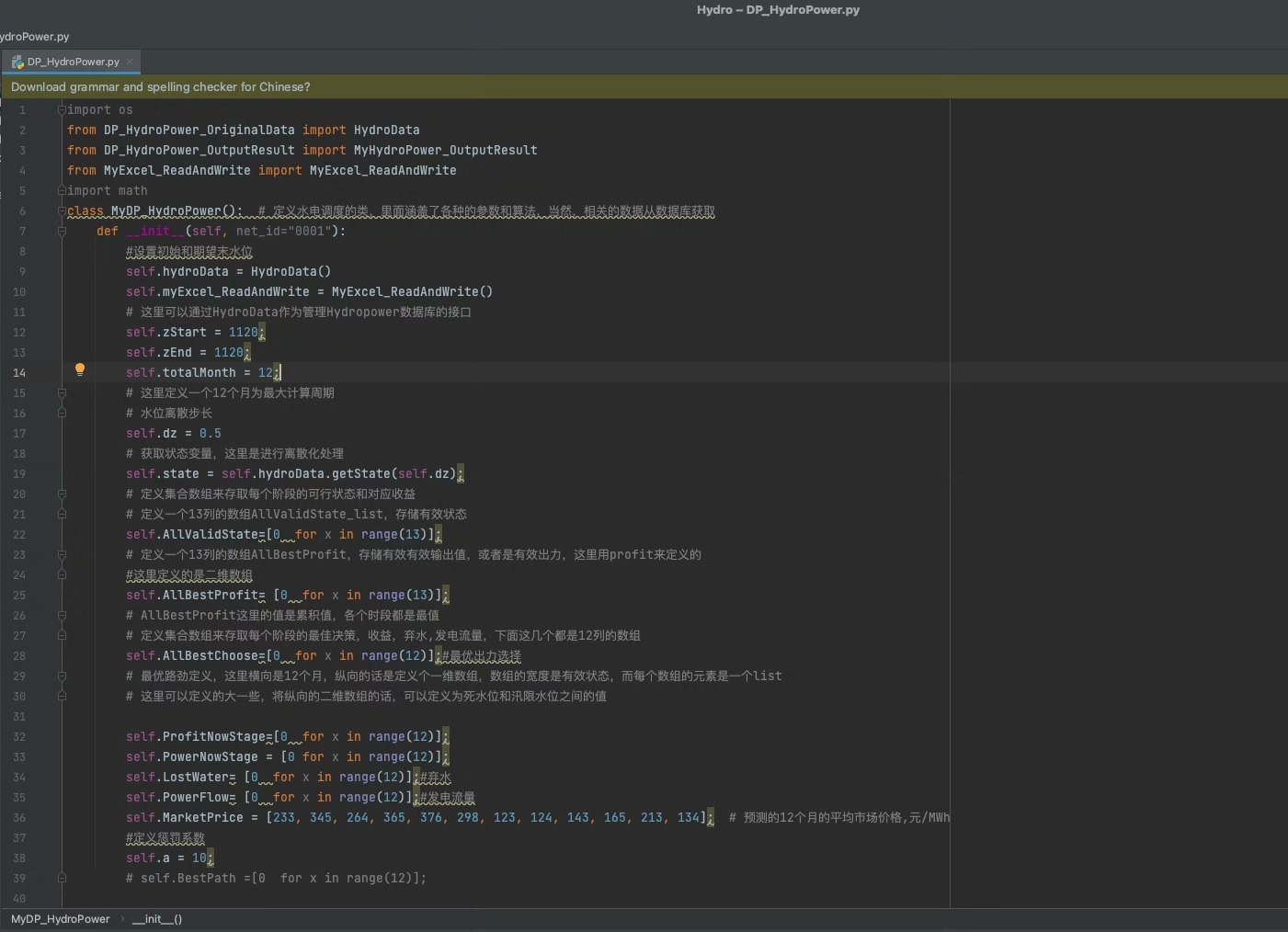
实际跑起来有个坑:水位变化率参数如果调整,Python版改个系数就行,Matlab版还得重新计算离散化后的索引。注意那个max/min防止数组越界的操作——Python里字典查询不存在的键大不了返回空,但Matlab数组下标越界直接报错,所以得做边界限制。今天咱们直接撸袖子看代码,拿Python和Matlab各写一版对比着玩。性能方面,Matlab的矩阵运算在状态空间明确时确实快,特别是能用向量化
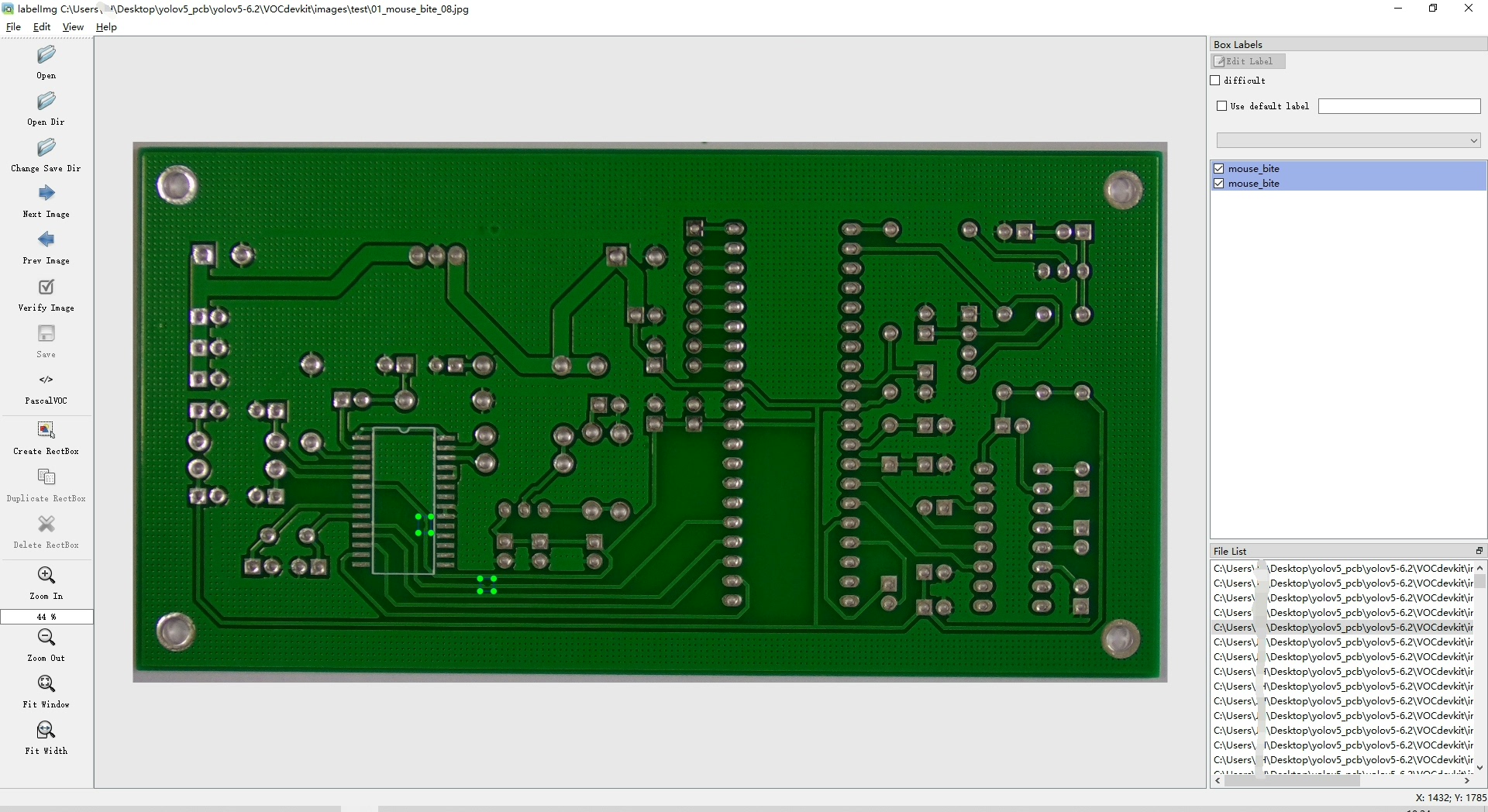
PCB表面缺陷检测数据集含有xml标签文件可用于yolov3yolov4yolov5yolov6 yolov7yolov8目标检测工业自动化时代,PCB板缺陷检测是计算机视觉领域的重要应用之一。今天,我将带大家从零开始,探索如何利用公开的PCB缺陷检测数据集,结合YOLO系列模型,打造一个高效实用的缺陷检测系统。
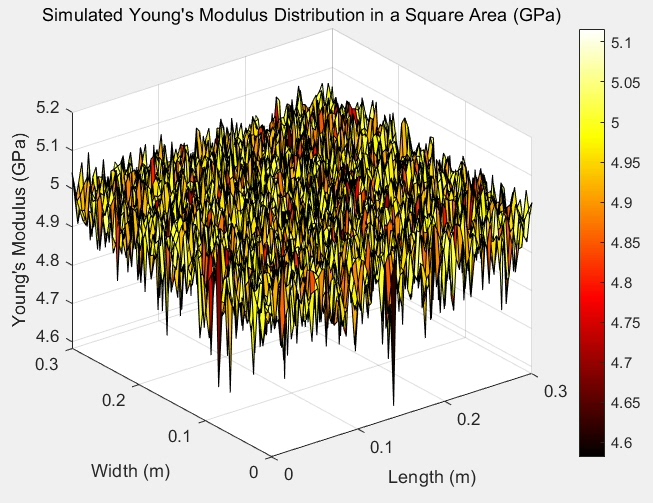
搞水力压裂模拟的老司机都知道,岩石损伤模型这玩意儿既烧脑又吃算力。岩石的非均匀参数,都是通过MATLAB用Weibull分布生成,然后导入,附件有随机分布脚本文件,可随机生成参数。岩石的非均匀参数,都是通过MATLAB用Weibull分布生成,然后导入,附件有随机分布脚本文件,可随机生成参数。本模型用Comsol模拟注水过程中的岩石损伤,考虑完全耦合模型,无需借MATLAB计算损伤变量,计算效率高
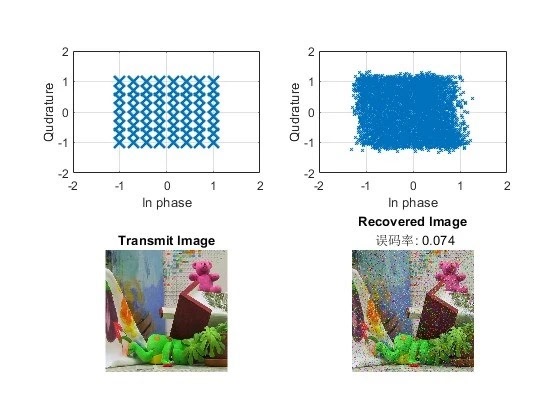
当看到接收端完美还原图像时,那种快感就像在嘈杂的派对上突然听见清晰的音乐。不过别高兴太早,试着把多径信道模型加上(比如瑞利衰落),立马教你做人——这时候就得搬出导频插入、MMSE均衡这些高阶玩法了。这段直接把图片转成比特流,注意这里用de2bi做十进制转二进制时,'left-msb'参数确保高位在前。别小看这个细节,曾经有人在调制解调时因为bit顺序颠倒导致图片鬼畜,debug到怀疑人生。实际系统