- @2503_94173062
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
舵机动作倒是简单粗暴,离散的五个档位:左满舵-20度、左半舵-10度、正中、右半舵+10度、右满舵+20度。在平静水域测试时,模型能在20个训练周期内把CTE控制在0.5米以内,比传统PID控制少交30%的"过路费"(舵机损耗)。训练时用的经验回放池活像船长的航海日志,每次从池子里随机抽批数据更新,防止模型在某个风浪场景里钻牛角尖。实际训练中发现,这个权重配比能让船在风浪中走出比老船长更丝滑的S型
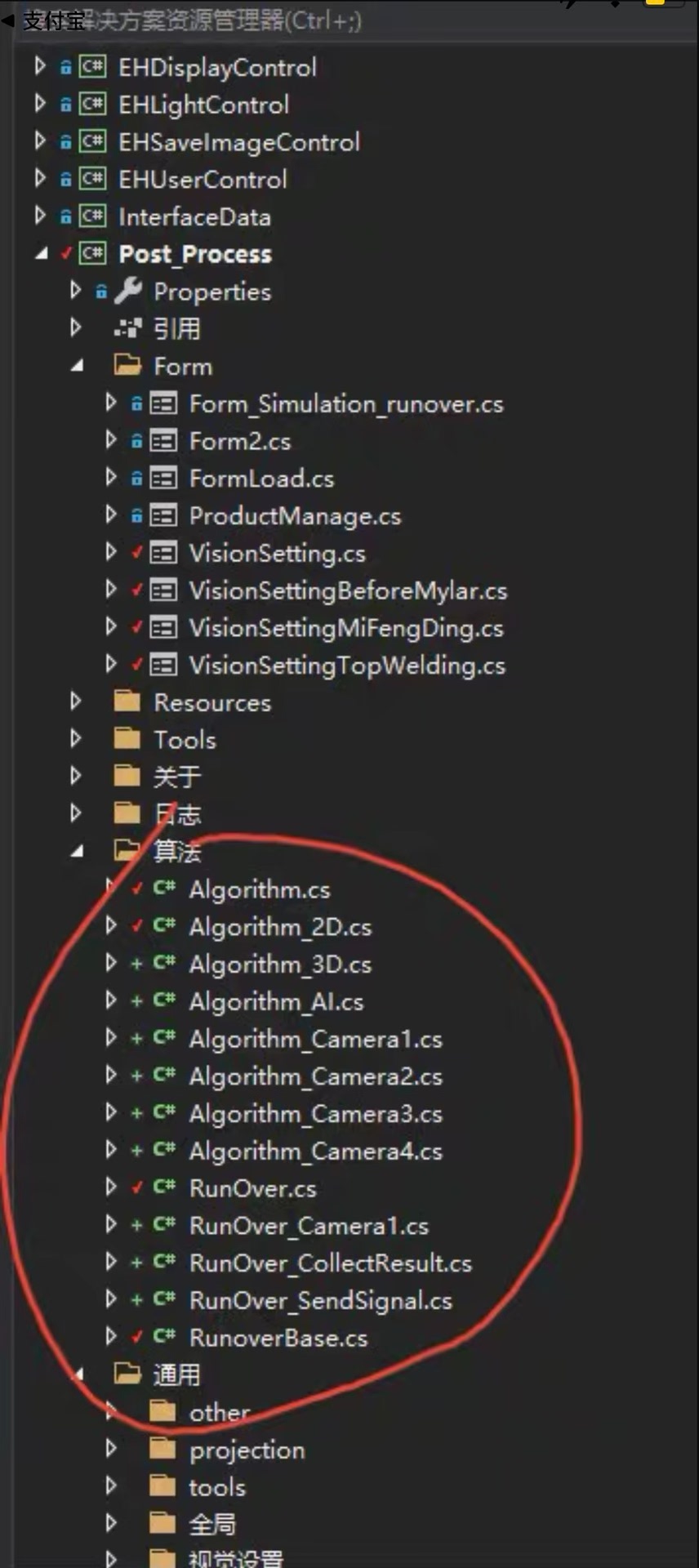
视觉软件框架应用于新能源行业电池缺陷检测多工位缺陷检测,相机,光源,通讯都能动态配置,同样适用于3C行业,C#应用高级反射可单独配置算法,各个相机采图可离线加载图片离线调试,解决了UI与算法耦合,每个相机运行时可以采集多张图处理数据,可在算法里进行处理,另外每个相机处理完结果后可以经过反射自定义over事件处理数据结果。自己动手撸了个C#视觉检测框架,支持多工位离线调试和动态配置,在3C行业居然也
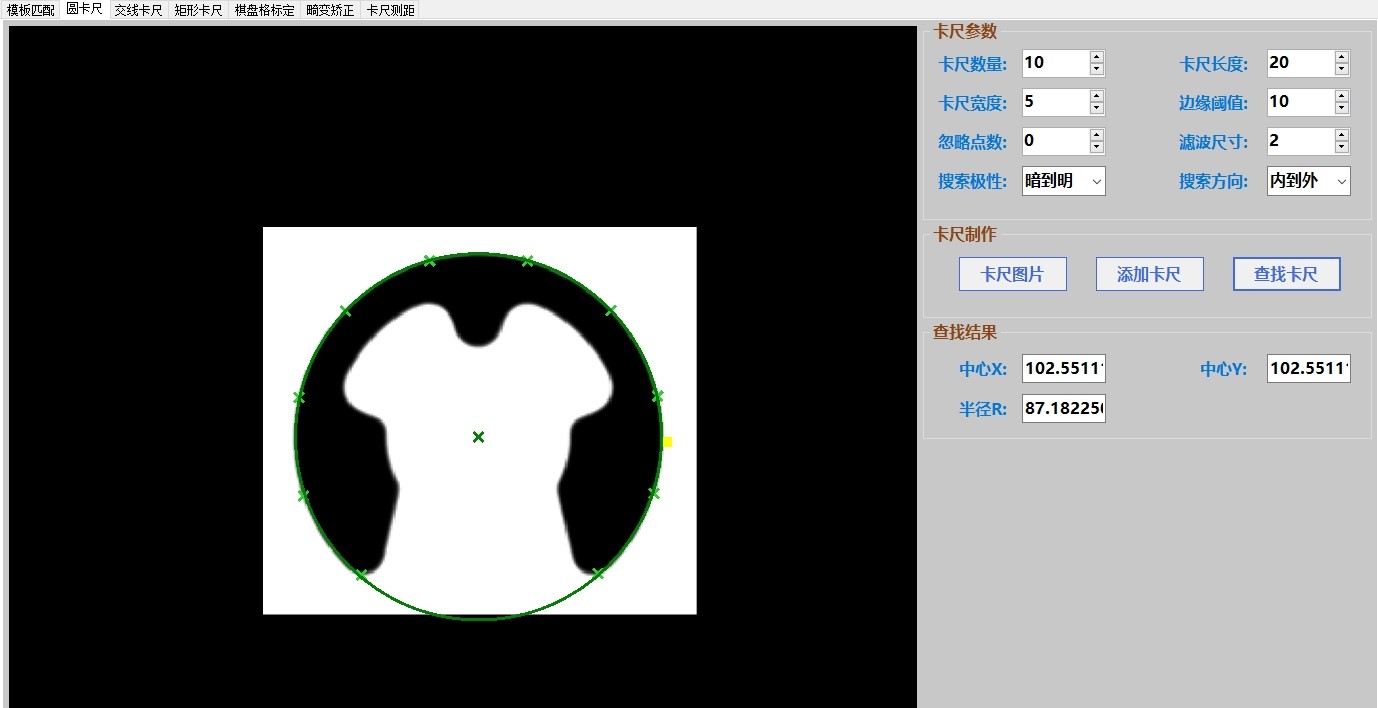
基于Opencv C# 开发的圆卡尺工具源码,代码运行正常,由实际运行项目中剥离,含测试图片,包含一个强大的视觉控件源码,控件仿halcon,支持平移,无损缩放,显示各种自定义图形工具,鼠标拖动,简单方便。可以提供,包可正常运行。嘿,各位搞开发的小伙伴们!今天来给大家分享一个超实用的基于OpenCV C#开发的圆卡尺工具源码。这可不是一般的代码,它是从实际运行项目中精心剥离出来的,经过了实战检验,
今天给大伙儿看个实战方案,直接上硬菜——这个系统不仅接了Modbus和MQTT,还能把温湿度传感器、智能开关这些设备玩得飞起。稳如老狗的性能和清晰的代码结构,车间里跑三年不带掉链子的。整套系统最骚的设计是异常恢复模块——通讯中断自动切备用协议,数据补传机制,甚至还能根据设备离线时间自动调整采样频率。代码里随处可见的try-catch不是摆设,每个关键操作都有状态日志,半夜设备抽风第二天直接看日志定
javaShopJAVA版多用户B2B2C商城源码(PC+H5+小程序+APP)友情提示:此源码需要有java基础的开发人员JAVA版多用户B2B2C商城源码(PC+H5+小程序+APP)商城前台:商城后台:管理员账号:admin 密码:111111商户端:账号:javashop密码:javashop企业级基于Spring Boot构建,完全遵循RESTful规范,齐全swagger文档,完整的单
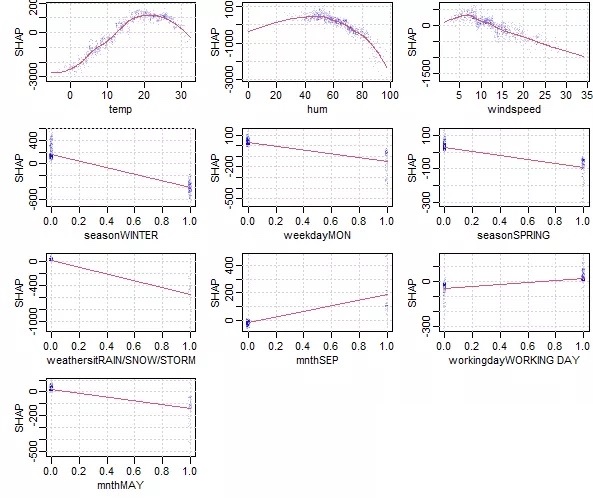
机器学习预测模型解释器R语言实现SHAP分析,预测模型评估SHAP分析包含我们科研私家菜团队优化开发的SHAP包及模型分析示例代码,保证代码和图表均可以复现。提供全程。在机器学习领域,模型的可解释性日益受到重视,特别是在医疗、金融等高风险决策领域。SHAP(SHapley Additive exPlanations)作为一种先进的模型解释技术,能够量化每个特征对模型预测结果的贡献度。本文将深入分析
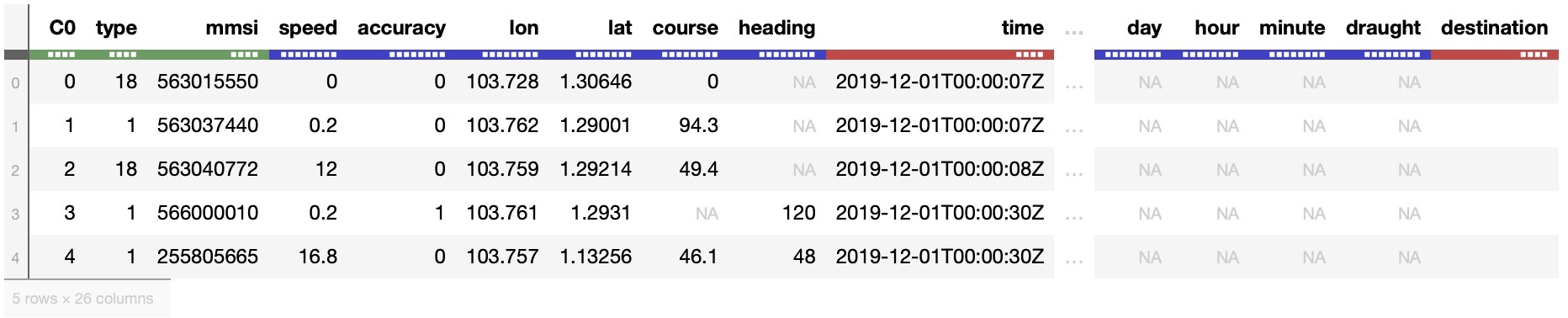
新加坡港口的繁忙程度超出常人想象——这片水域每天要处理全球四分之一的海运贸易量,相当于每分钟都有800艘船在狭窄航道里跳"海上芭蕾"。这时候,机器学习成了救命稻草,特别是那些藏在AIS数据里的航行规律。这套系统上线后,巡逻船的工作模式从"救火队"变成了"先知模式",提前到高风险区域蹲守。不过最近有船员反馈,某些渔船故意走非常规路线来"调戏"AI——看来对抗样本的问题在现实世界同样存在,下次得把博弈
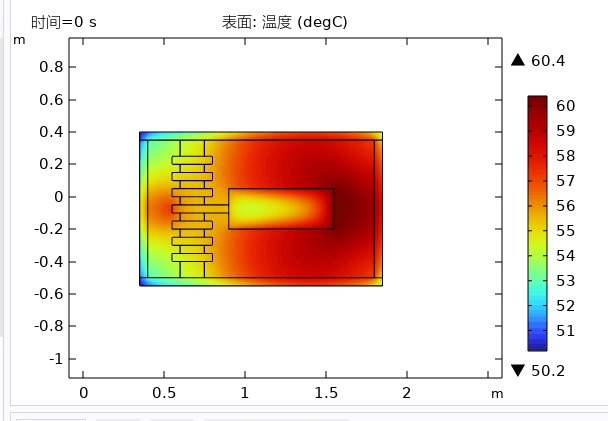
代码区随手敲下material.setProperty('thermal_conductivity', '0.3+0.001*(T-293)[1/K]'),旁边的实习生盯着这行代码看了三秒:"前辈,这中括号里的量纲确定不是在开玩笑?" 我默默把咖啡杯往远离键盘的方向推了推。打开COMSOL的瞬间,我的咖啡杯突然震了一下——这大概就是传说中的"多物理场耦合"在三次元世界的具象化表现。comsol电-
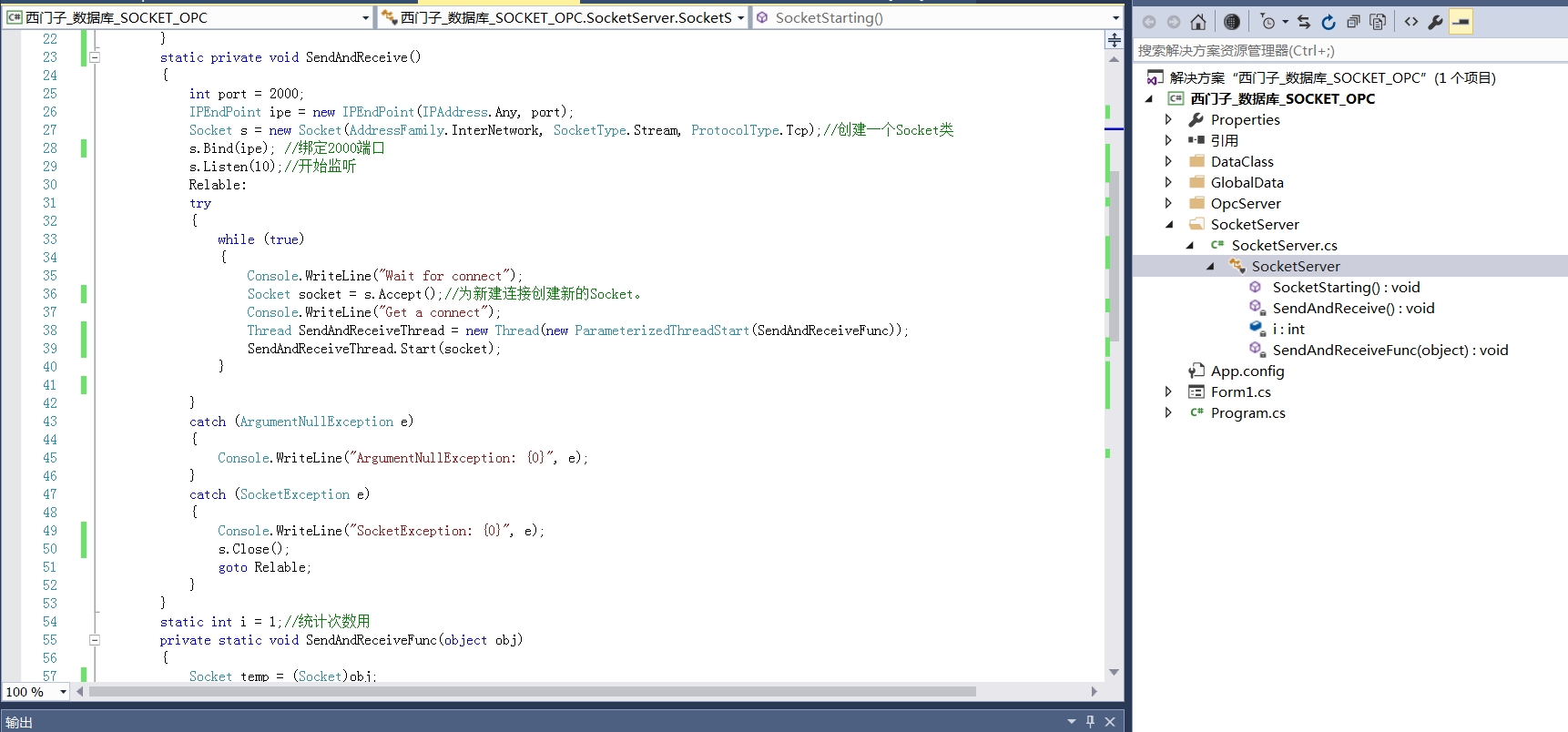
C#读写西门子PLC.OPC.数据库.Socket1、PLC数据通信读写;2、联合OPC;3、联合Socket;4、联合数据库;在工业自动化领域,数据通信和数据处理是必不可少的环节。尤其是在使用西门子PLC(Programmable Logic Controller)时,如何在C#中实现PLC数据的读写、联合OPC(Open Platform Communications)、Socket通信以及与
本课程基于Abaqus,应用两种加载方式一-FluidCavity与Pressure分别介绍了气动驱动软体机器人仿真分析流程。该软体机器人涉及两种材料,主变形部分选用超弹性材料,应用Yeoh本构定义材料属性;限制层部分定义为线弹性材料。此外,对结果的后处理进行了简要介绍。想学轮胎充气、气囊充气、各种充气分析都能用最近学习了一个超有意思的课程,基于Abaqus平台,深入探讨了气动驱动软体机器人的仿真