




- @HrxXBagRHod
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
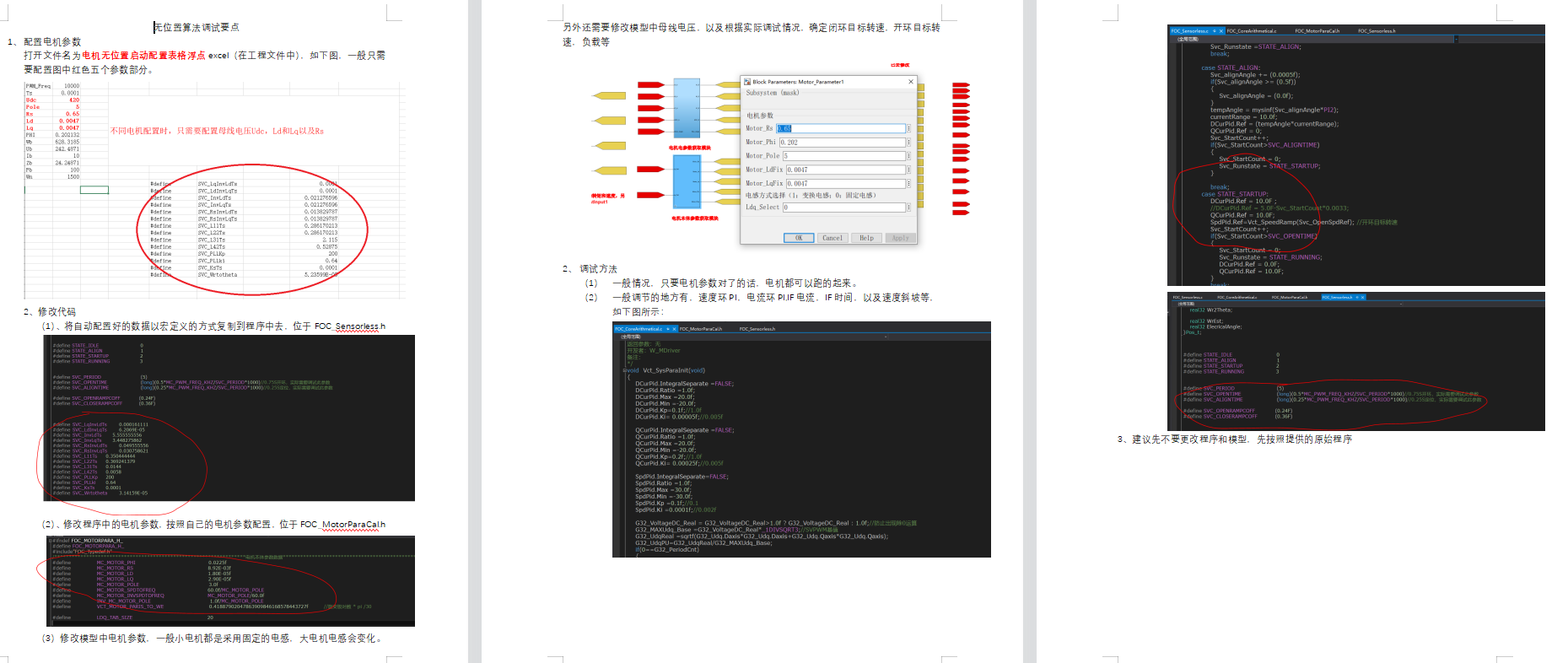
一种基于扩展反电动势的永磁同步电机无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等)为了方便学习和工作,该产品结合S-Function进行仿真,且属于量产产品级,已经在多个项目中应用,并赠送多种无位置纯仿真模型(包含滑膜,高频注入,MRAS,龙贝格等)
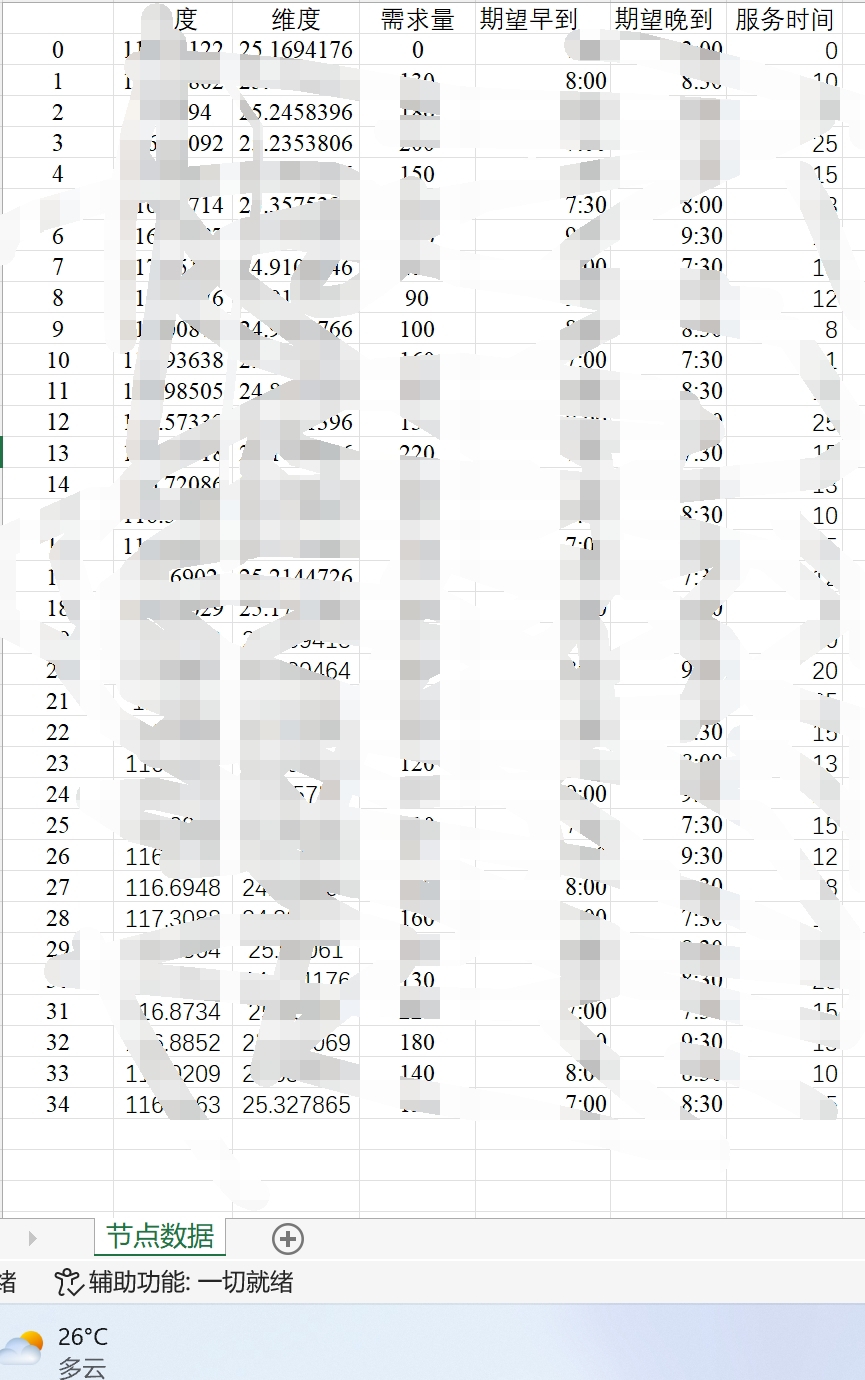
如果你的配送点是经纬度,把dist的计算换成球面距离公式就行,或者直接用osmnx拉取实际路网的行驶时间,改一下的计算逻辑就好。如果要算综合成本(油费+人力),直接把改成totalcost += dist * 油费单价就行,改起来毫无压力。反正这个脚本我自己用了大半年,不管是公司内部的配送排班还是帮朋友做的小物流项目都能用,真的是改改数据就能出结果,比手动排靠谱一万倍。
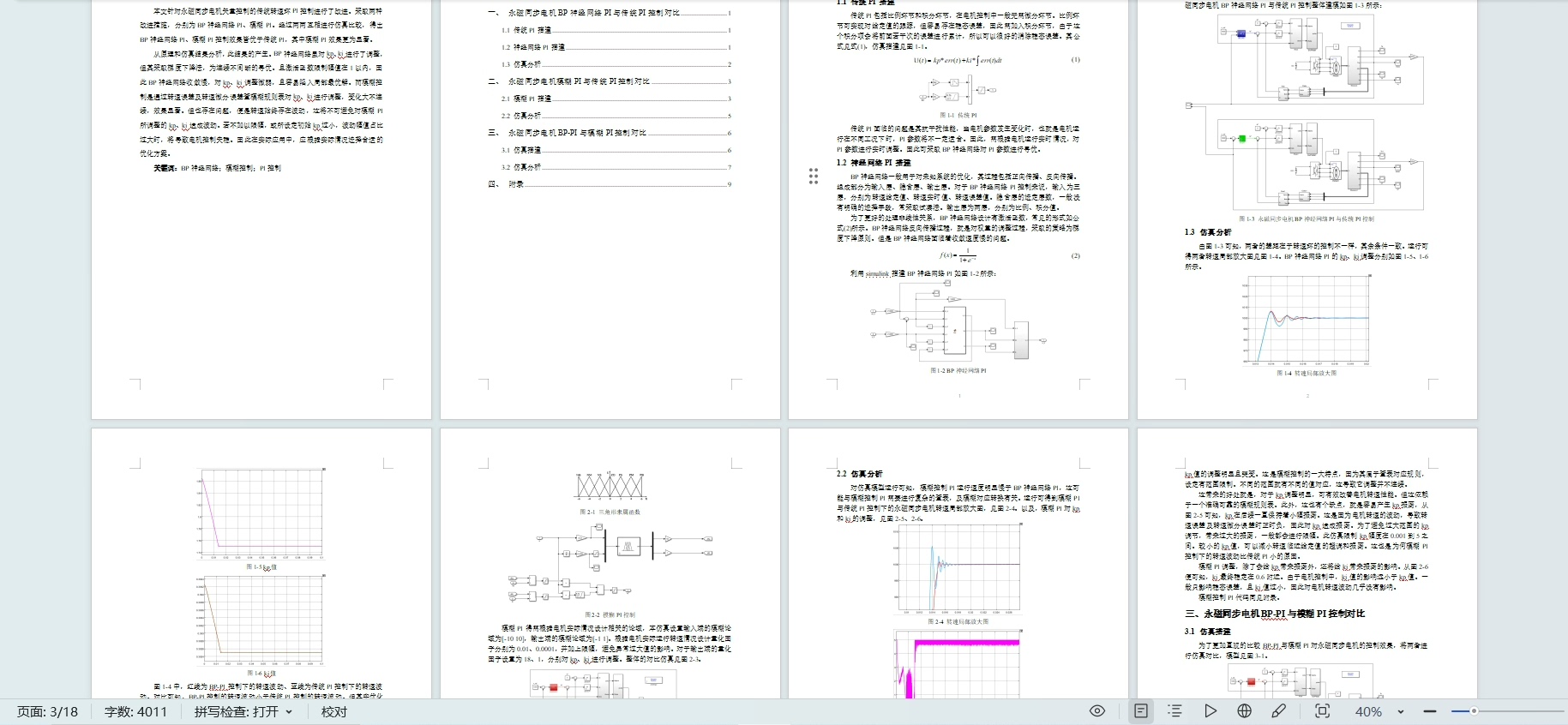
BP神经网络采用梯度下降法寻优,调整依据为转速与给定值的误差,可根据实际情况,调整转速环PI,以达更优的控制效果。BP神经网络采用梯度下降法寻优,调整依据为转速与给定值的误差,可根据实际情况,调整转速环PI,以达更优的控制效果。图四为转速,其中红线为BP神经网络PI控制下的转速,蓝线为普通PI控制下的转速,由图可知前者优于后者;图四为转速,其中红线为BP神经网络PI控制下的转速,蓝线为普通PI控制
随机森林是个不错的开局选择,天生抗噪能力强。注意level-1的特征要包含原始数据,别只用基模型的预测概率,这样元模型才有更多信息量。网络入侵检测算法实现改进 数据集有nsl kdd kddcup99cicddos2017 算法可机器学习的诸多算法,支持向量机,随机森林,决策树还有集成学习,有各种评价指标和混淆矩阵。网络入侵检测算法实现改进 数据集有nsl kdd kddcup99cicddos2
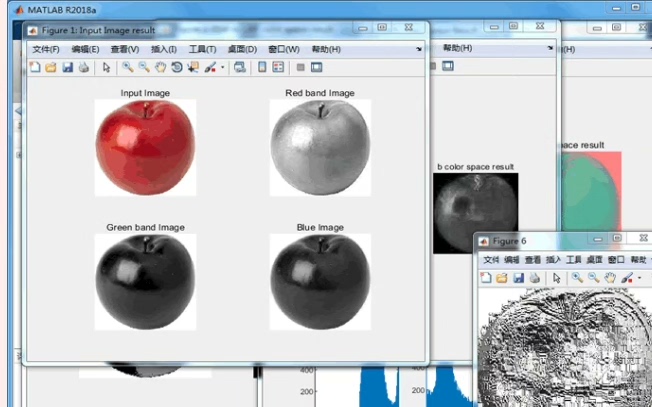
水果检测与自动识别分级:1,对于图像的灰度处理,二值化 2,边缘检测,特征提取,中值滤波 对于水果的分级,包括对水果的用颜色模型进行分析处理上周在社区超市兼职帮理货员姐姐理了三小时柑橘,指甲缝卡得全是橙皮油,最后挑出的大小均匀色泽又鲜亮的还没一小筐——分拣机要是能普及到这种夫妻老婆店就好了!但分拣机背后的核心其实就是几步我们普通人用Python OpenCV就能捣鼓出来的操作:先把水果从背景“揪出
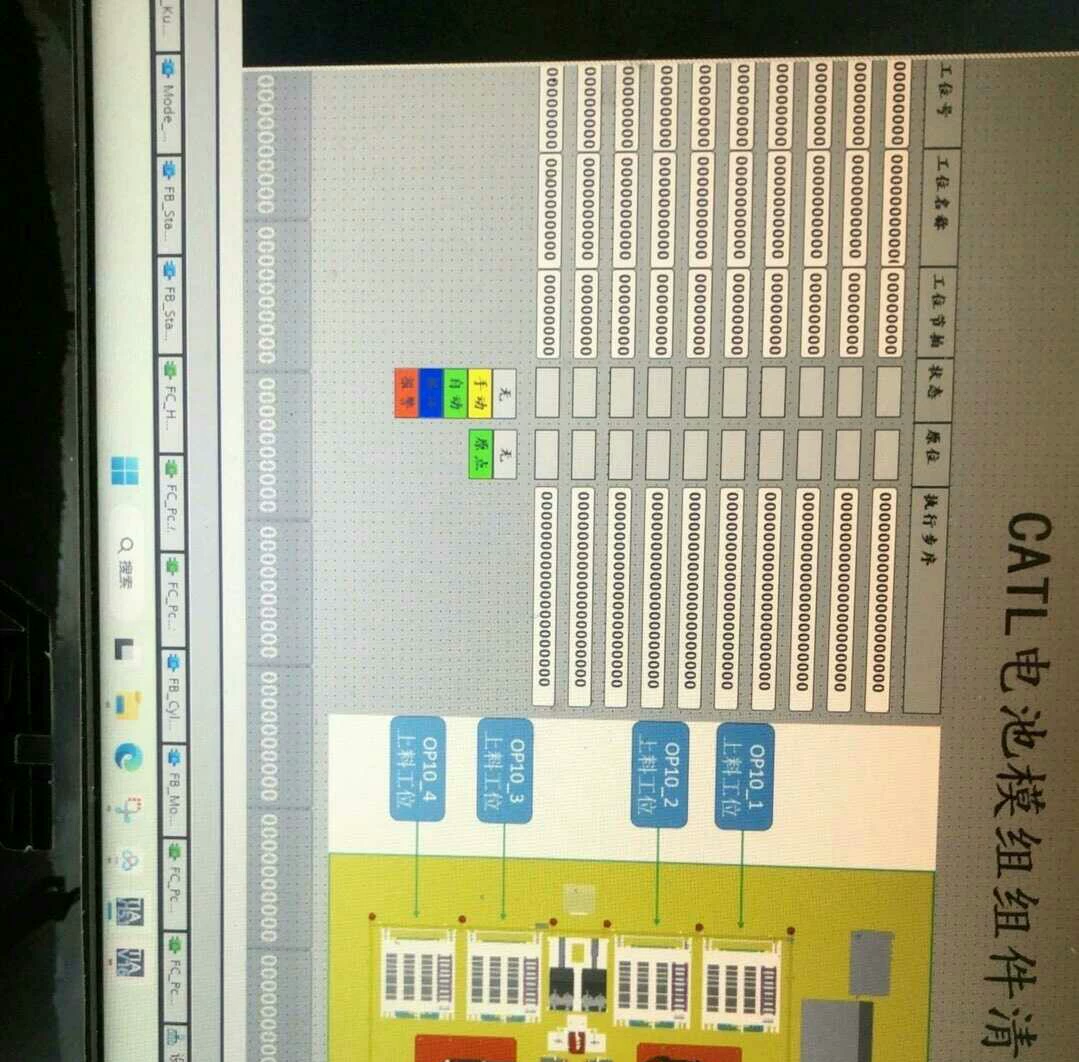
整个程序的结构特别清晰,主OB100初始化全局变量,OB1循环调用每个工位的功能块,改某个工位的逻辑的时候完全不用碰其他工位的代码,模块化做得特别好。我一开始瞎写过脚本,结果屏卡成PPT,后来改成这种硬映射,流畅得一批。对了,这个程序用的是博图V15.1写的,别用太高版本打开,当年踩过坑——用V17升级的时候,轴控制块的参数差点全丢,提前备份了硬件配置才救回来。是不是FALSE就行,不用一个个点D
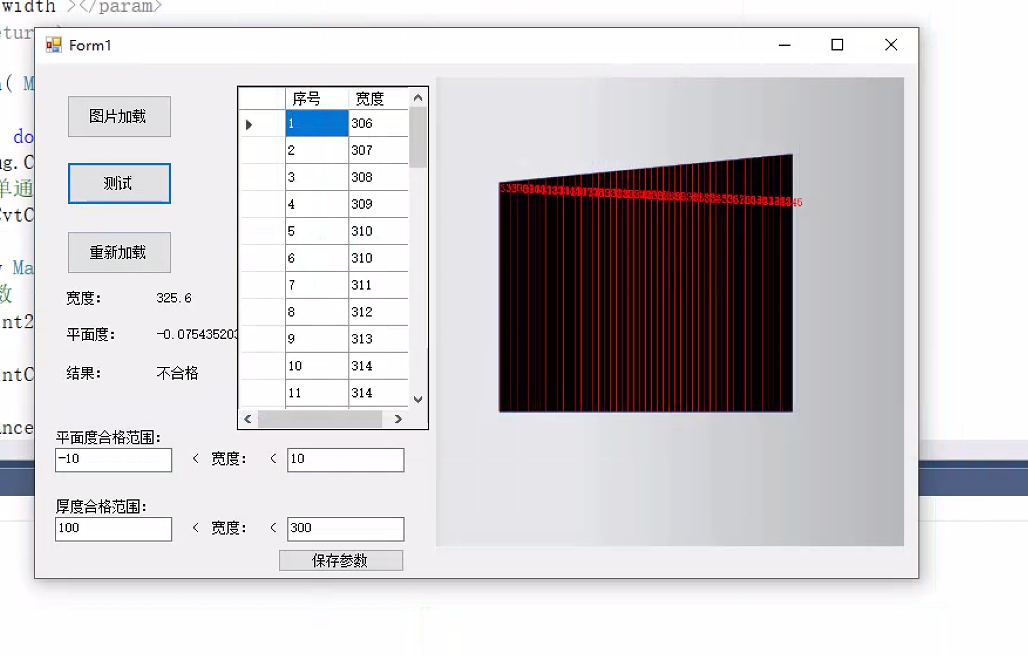
跑完代码发现个怪现象:平整区域角点分布均匀,但有折痕的地方突然冒出密集红点(图2)。后来想明白了——材料变形导致表面纹理产生不规则突变,算法把这些突变点都当角点了。老师傅拿个游标卡尺左量右测,咱们程序猿当然要琢磨怎么用代码搞定。别急,看完代码再说。但日常质检应付个把毫米级误差,这套代码足够让质检大姐少唠叨你两回了。不过CLAHE的参数要看具体材质,不锈钢和铝板的最佳参数能差三倍。06OpenCVS
历史数据,报表导出功能;历史数据,报表导出功能;3. 系统统计:创建项目总数、接入设备数、传感数据点、触发器数、子账户用户数、设备故障率、当前设备离线数、今日报警数/已处理数。3. 系统统计:创建项目总数、接入设备数、传感数据点、触发器数、子账户用户数、设备故障率、当前设备离线数、今日报警数/已处理数。4.系统管理:用户列表、服务统计、项目列表、设备列表、设备仓库、图标管理、数据字典、系统参数。4

锌离子电池 锌电 comsol模型电场分布,浓度场分布此链接拍下发两个模型两个教程(电场和浓度场分布的两个基本模型及其教程)锌枝晶,锂枝晶Comsol模拟搞锌离子电池的朋友都懂,枝晶这玩意儿简直是噩梦——好好的电池充着充着,锌枝晶戳穿隔膜直接短路,寿命瞬间打骨折。之前盯着锂枝晶研究了好久,转头看锌电,发现原理通但细节差不少,得从最基础的电场、浓度场摸起,这时候Comsol模拟就派上大用场了。先从电
数据集共15类 \"雏菊\", '蒲公英', '玫瑰', '向日葵', '素馨花', '栀子花', '金盏花', '芙蓉花', '金银花', '印度锦葵', '麻风树属', '马拉巴尔木槿', '万寿菊', '香花', '蜘蛛百合'数据集共15类 \"雏菊\", '蒲公英', '玫瑰', '向日葵', '素馨花', '栀子花', '金盏花', '芙蓉花', '金银花', '印度锦葵', '麻风树属
