登录社区云,与社区用户共同成长
邀请您加入社区
智能指针(如`std::unique_ptr`和`std::shared_ptr`)的引入实现了自动化的资源管理,遵循RAII(资源获取即初始化)原则,从根本上减少了内存泄漏的风险。熟练运用容器(如`std::vector`, `std::unordered_map`)、算法(如`std::sort`, `std::transform`)和迭代器,能够编写出既简洁又高效的代码。最终,一个成功的C+
System.out.println(Runnable线程:+ Thread.currentThread().getName());System.out.println(线程执行:+ Thread.currentThread().getName());new ArrayBlockingQueue<>(100) // 工作队列。() -> System.out.println(所有线程到达屏障));
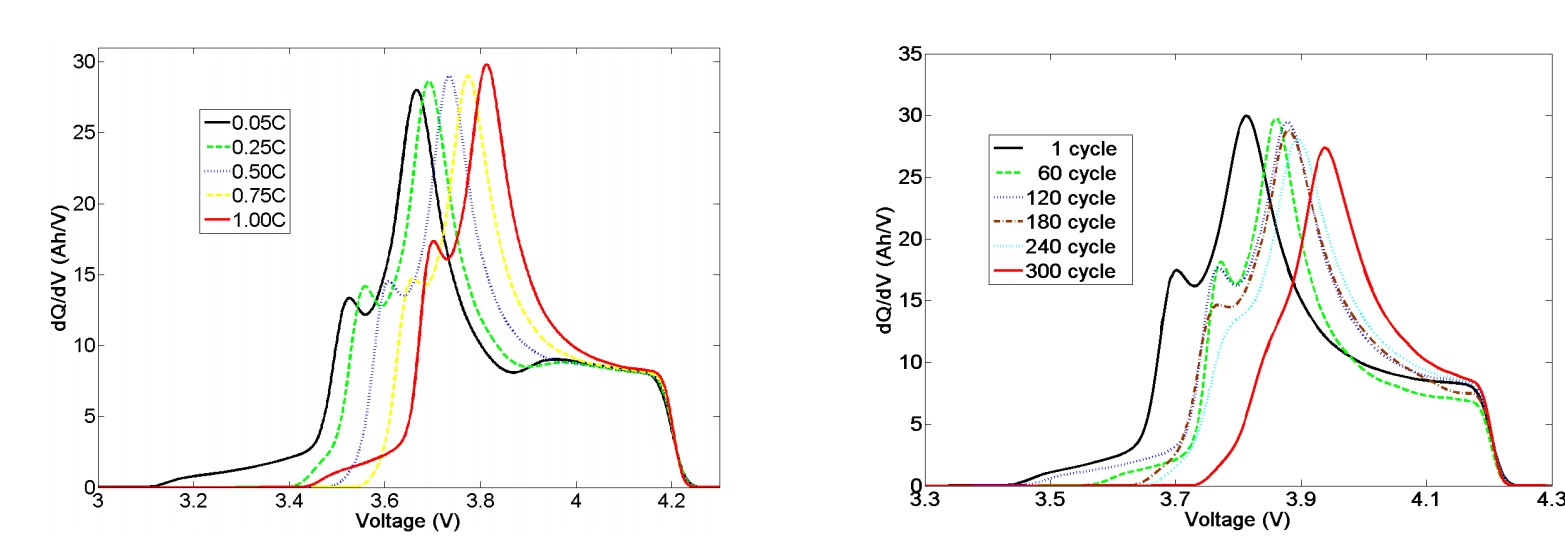
本代码库实现了一套完整的锂离子电池健康状态(SOH)和剩余使用寿命(RUL)预测系统,基于增量容量分析(ICA)和差分电压分析(DVA)方法。该系统能够从电池充放电数据中提取关键特征,并通过机器学习模型实现电池性能衰退的准确预测。
别问为啥收费,你试试通宵帮人配环境就懂了——时间才是最贵的成本。简单问题我咸鱼看到了就免费回答,不会运行的我指导你动手200,再懒一点的远程帮你搭开发环境的500,再土豪一点啥都不想动的1000包你生产环境可用。简单问题我咸鱼看到了就免费回答,不会运行的我指导你动手200,再懒一点的远程帮你搭开发环境的500,再土豪一点啥都不想动的1000包你生产环境可用。这个框架的优点就是依赖中间件比较少,部署
在时间步长小于td的情况下,判断温度和设定温度之间的差值,根据差值判断是否需要开启空调。22. 第89行:`linp2(1:td-1)=linp(1:td-1)`将linp的前td-1个元素赋值给linp2的前td-1个元素。内容:建立空调负荷的聚合模型,按照第二章考虑调节空调温度对空调响应潜力的影响,程序结果充分说明随着上调温度的增大,响应程度逐渐增大。内容:建立空调负荷的聚合模型,按照第二章考
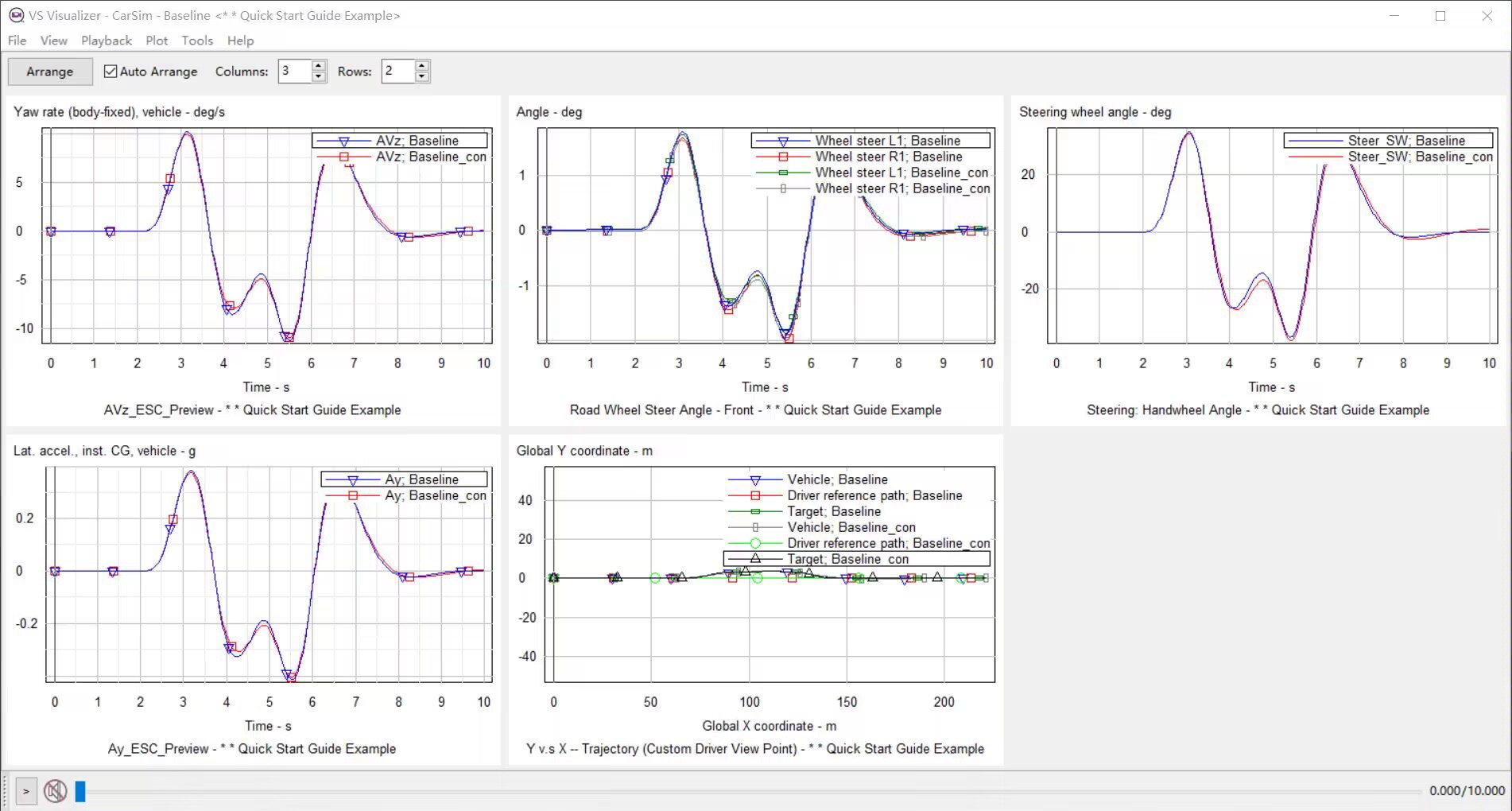
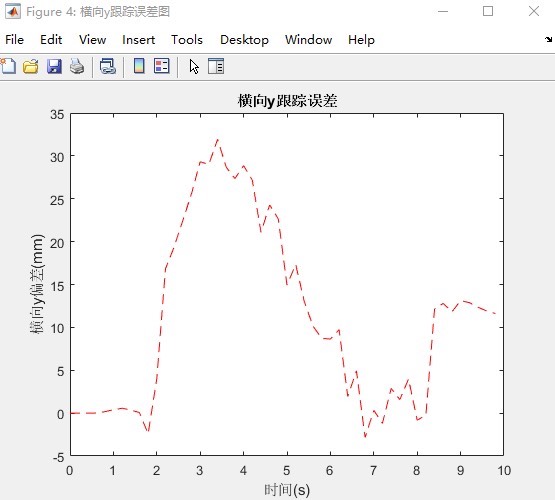
线控转向系统Carsim和Simulink联合仿真模型,带Carsim数据库,C级车。【正向建模,利用三环PID控制算法控制无刷直流电机获得前轮转角】主要根据Carsim自带的转向系统,查出小齿轮和转向角之间的关系,利用查表法反推目标转角,而后通过无刷直流电机模型跟踪目标转角。图示为:角阶跃工况下,仿真模型前轮转角、横摆角速度、侧向加速度、轨迹图。最后一张图是 双移线 工况的响应曲线,拐角处响应跟
高精度称重模块设计方案供电:12-24V通信接口:CAN通道:2精度0.1g,带零点校位高精度,低温漂含原理图,PCB,BOM表,源工程代码,可直接生产最近调试无人售货机的散称模块,踩了一堆坑——普通电阻应变片模块要么零点飘上天,要么20kg量程误差±5g根本没法用,串口通信还老丢包,CAN协议的又贵得离谱。翻了翻开源仓库改了三天,终于搞出个低成本、0.1g精度、12-24V宽压、双路称重、带源工
【5.MPC单步垂直泊车】APA 单步垂直泊车 模型预测MPC 自动泊车Carsim与Matlab联合仿真后期会继续迭代更新的版本包含垂直路径数据点(只有路径点)和MPC控制算法后可以有参考模型,全部开源,入群后,可在群里提问,会。后期不断优化。1.Carsim2019 2020场景及车辆配置文件2.Simulink文件包含stateflow纵向逻辑控制3.MPC横向控制算法文件4.垂直路径点处理
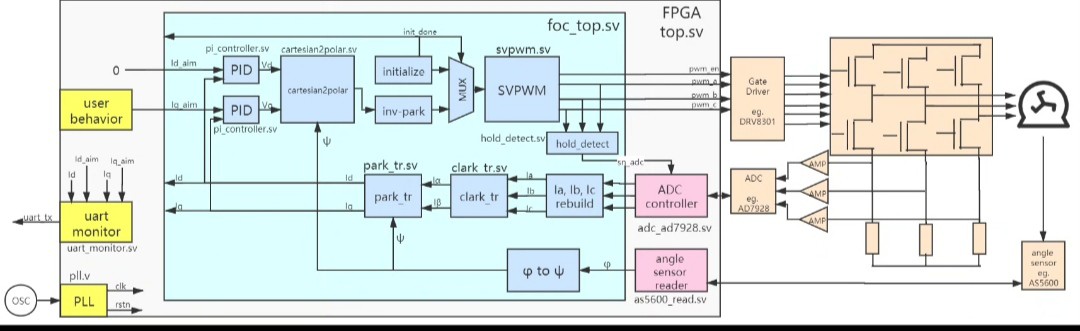
先说清楚,这个版本不带位置环也不玩速度环,就专注电流闭环控制,适合需要快速响应的场合。在Simulink模型里(想象有个模型截图),电流环被抽象成离散传递函数模块,和Verilog代码的采样/计算周期严格对应。A1 不是用Matlab等工具自动生成的代码,而是基于verilog,手动编写的。A4 单采样单更新,中断频率/计算频率,可以基于自己所移植的硬件,重新设置。A4 单采样单更新,中断频率/计
(文献+程序)多智能体分布式模型预测控制 编队 队形变换论文复现带文档 MATLAB MPC 无人车 无人机编队无人船无人艇控制 编队控制强化学习 嵌入式应用 simulink仿真验证 PID 智能体数量变化在智能控制的广袤世界里,多智能体分布式模型预测控制(MPC)在编队领域那可是相当耀眼的存在。无论是无人车、无人机编队,还是无人船无人艇控制,都离不开它的“保驾护航”。今天咱就来唠唠这个超有趣的
轮胎模型用了魔术公式的魔改版。十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。包含模块:转向系统,整车系统,悬架系统,魔术轮胎,车轮系统,PI驾驶员控制模块等。
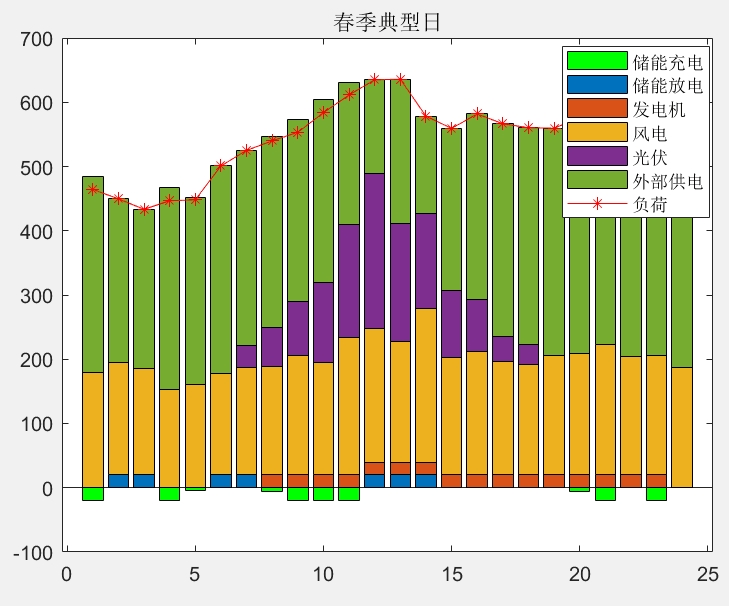
微网两阶段鲁棒优化matlab版采用CCG和kkt条件编制两阶段鲁棒优化程序,以储能、发电、风电和光伏容量作为第一阶段变量,以主体出力作为第二阶段变量,以负荷、风电和光伏出力作为不确定性变量,实现微网两阶段优化模型在微网系统的优化调度中,两阶段鲁棒优化是一种非常有效的策略。今天咱就来唠唠如何用Matlab实现基于CCG(Column - and - Constraint Generation)和K
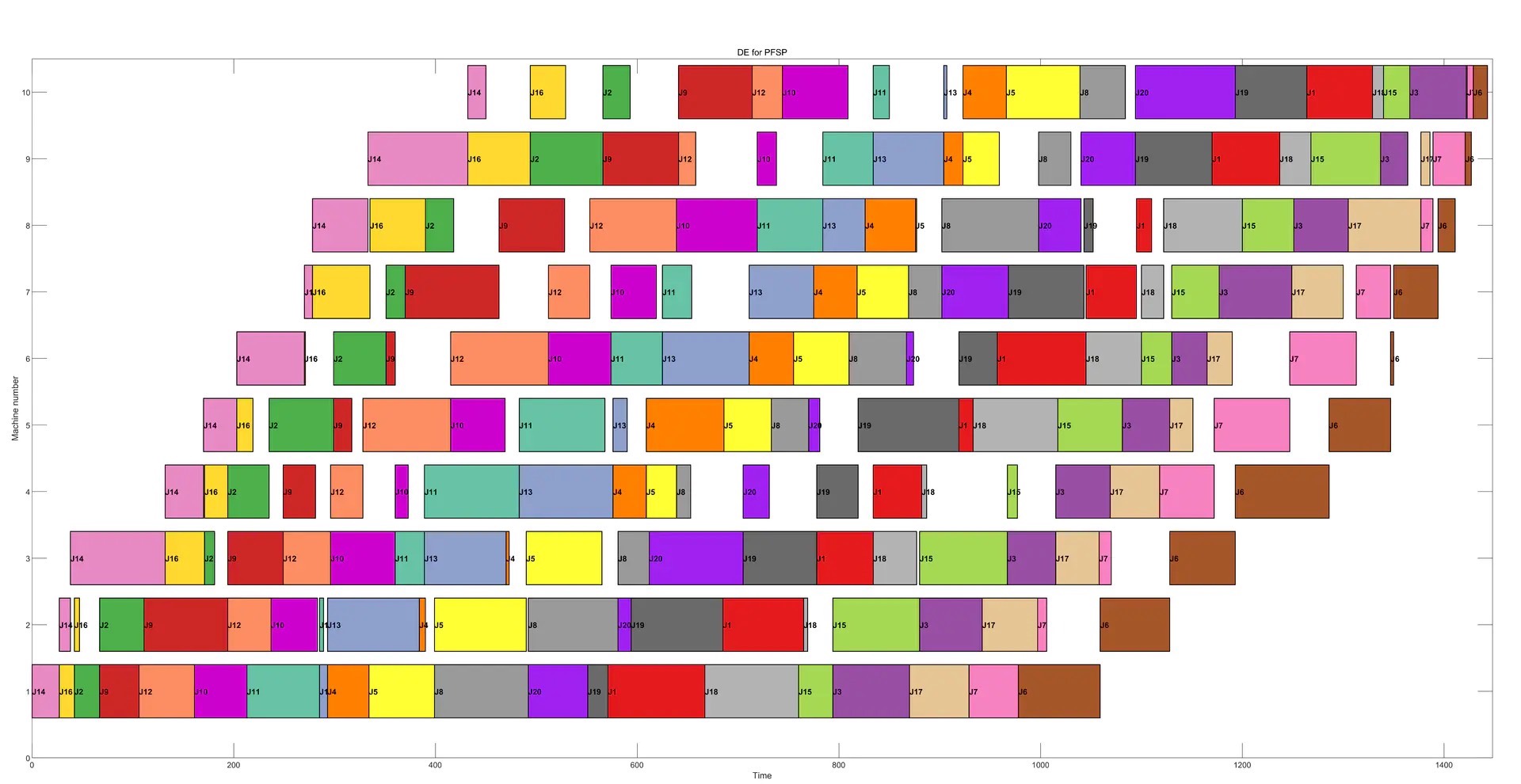
差分进化(DE)算法求解置换流水车间调度问题PFSP其中:main.m是主函数运行即可;DE.m是算法的代码;color_selection用于获得甘特图的颜色配置;gantt_chart.m绘制甘特图;objective.m是目标函数,即计算Makespan;sorting.m根据调度方案计算每台机器任意时刻的加工信息(开始时间、结束时间、工件号、机器号), 用于绘制甘特图;调度测试集包括Car
问题:对 React 的 Flux 架构感到困惑 - waitFor 我对如何使用 React 有自己的看法,并且正在构建自己的框架,受 Om 的启发。我正在实现一些类似于 Flux 架构的东西,商店可以在某些事件上更新自己。 我不确定的是为什么在 Flux 架构中我们需要存储依赖项? 商店不应该是给定有界上下文的自包含数据持有者,就像我们对 CQRS 架构所做的那样? 在事件系统中,2 个 CQ
问题:Om 但在 javascript 中 我将成为 David Nolen 的Om 库的粉丝。 我想在我们的团队中构建一个不太大的 Web 应用程序,但我无法真正说服我的队友切换到 ClojureScript。 有没有一种方法可以使用 om 中使用的原则但在 JavaScript 中构建应用程序? 我在想类似的事情: 1.immutable-jsormori用于不可变数据结构 2.js-csp用
rizomuv
——rizomuv
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI Agent技术社区
AI Agent技术社区

 DAMO开发者矩阵
DAMO开发者矩阵
 快递鸟社区
快递鸟社区
 AtomGit开源社区
AtomGit开源社区
 2048 AI社区
2048 AI社区

 React
React
