- @obDLaSfLKr
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
机械臂仿真,RRT避障算法,六自由度机械臂机械臂matlab仿真,RRT避障算法,六自由度机械臂避障算法,RRT避障算法,避障仿真,无机械臂关节碰撞机械臂 机器人 DH参数 运动学 正逆解urdf建模 轨迹规划在机器人领域,六自由度机械臂可是个明星选手,它能在三维空间里灵活舞动,完成各种复杂任务。但要是周围有障碍物,它就必须学会巧妙避开,这时候 RRT 避障算法就派上用场啦。今天咱就用 MATLA
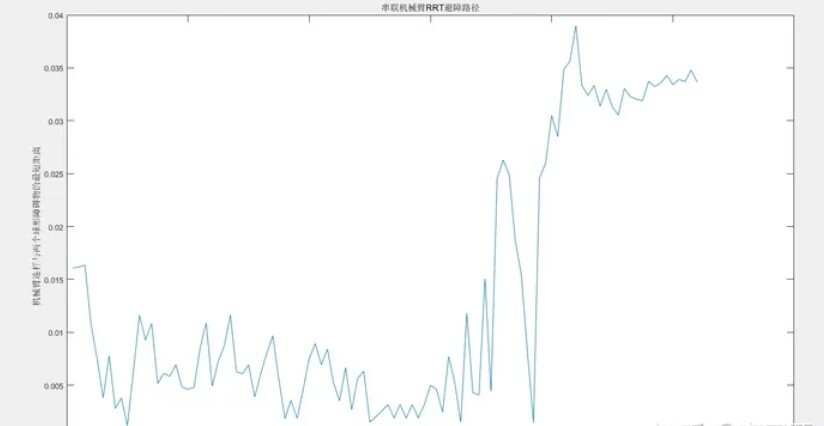
机械臂仿真,RRT避障算法,六自由度机械臂机械臂matlab仿真,RRT避障算法,六自由度机械臂避障算法,RRT避障算法,避障仿真,无机械臂关节碰撞机械臂 机器人 DH参数 运动学 正逆解urdf建模 轨迹规划在机器人领域,六自由度机械臂可是个明星选手,它能在三维空间里灵活舞动,完成各种复杂任务。但要是周围有障碍物,它就必须学会巧妙避开,这时候 RRT 避障算法就派上用场啦。今天咱就用 MATLA
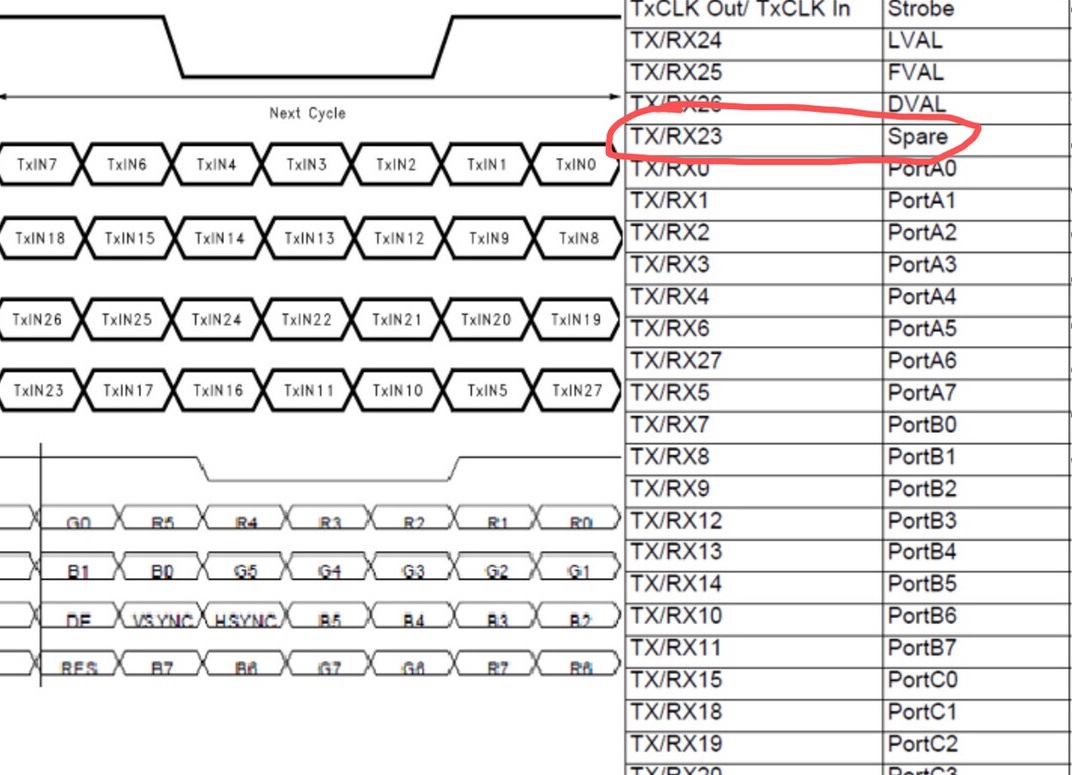
其次是数据窗口对齐策略,通过检测帧头标志0xF来找准有效数据的位置——这个0xF可不是协议文档里写的,是实测某型号相机时发现的隐藏特性。折腾了这么多项目,发现Cameralink最考验人的不是协议本身,而是如何应对各种非理想情况。最近在调试一套Cameralink图像传输系统时,突然想起五年前第一次接触这个协议时的手忙脚乱。调试时最烦人的是时钟抖动问题。本人在此深耕多年,完全掌握cameralin
搞STM32电机控制就像在玩硬件版的俄罗斯方块,寄存器配置、算法参数、硬件特性这些"方块"要是没对齐就等着炸板子吧。最近在啃ST官方那个无感FOC方案,基于MotorControl库5.4魔改的三电阻双AD采样方案,实测效果能跟商业驱动器掰手腕。最后晒下调试成果——用JScope抓的波形显示,转速环在1000RPM时的波动小于±3RPM,电流THD控制在5%以内,算是给这几个月的掉头发有个交代了。
数学建模,说到底是一个不断试错的过程。初学的时候,建议从简单的问题入手,慢慢积累经验。Matlab的功能非常强大,熟悉一些常用的工具箱(比如Curve Fitting Toolbox)会让你事半功倍。Matlab数学建模C完整思路和源代码图标,思路说明如果你是一个刚刚接触建模的小白,可能还会感到有些力不从心。但是别怕,多练多试,总有一天你会发现,Matlab不仅仅是一个工具,更像是一个可以帮助你解
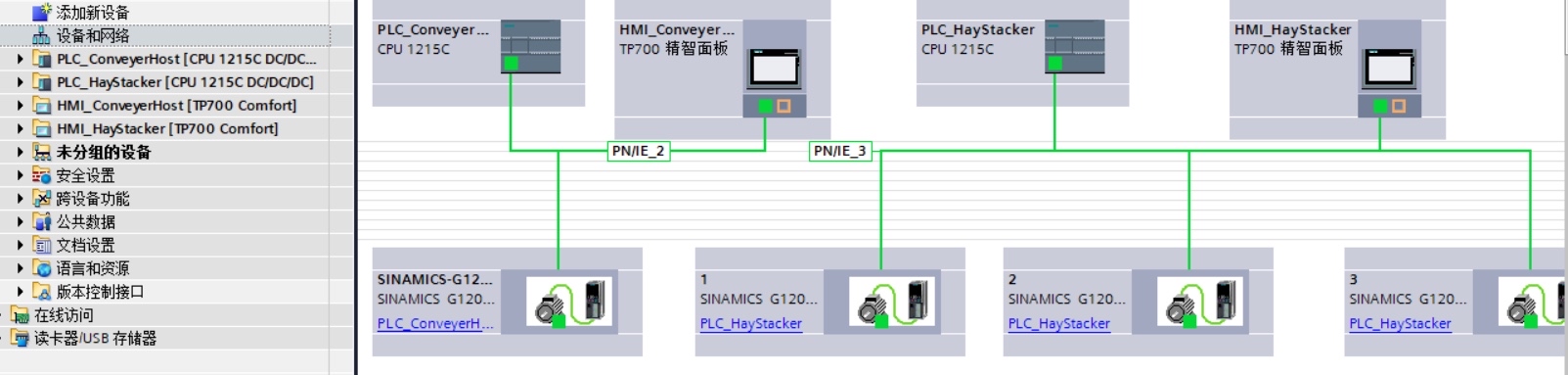
现在回想起来,最大的成就感不是调通了设备,而是把这么多协议和语言揉在一起后,程序还能保持可维护性——注释规范真的太重要了,三个月后自己还能看懂的逻辑才是好逻辑。今儿就带大伙儿看看这个项目的技术骨架,尤其是SCL和梯形图混编的实战玩法。不过用SCL处理通讯协议确实香,特别是需要处理结构化数据的时候。对应的梯形图部分就负责处理伺服使能、报警复位这些基础操作,两种语言的分工让程序既保持了可读性,又具备了
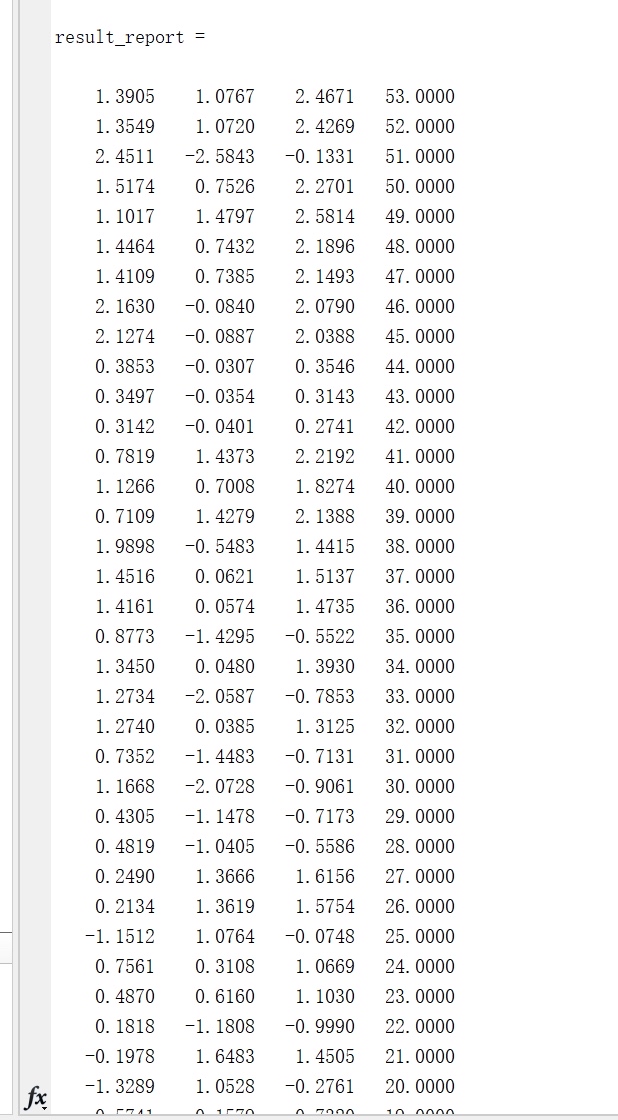
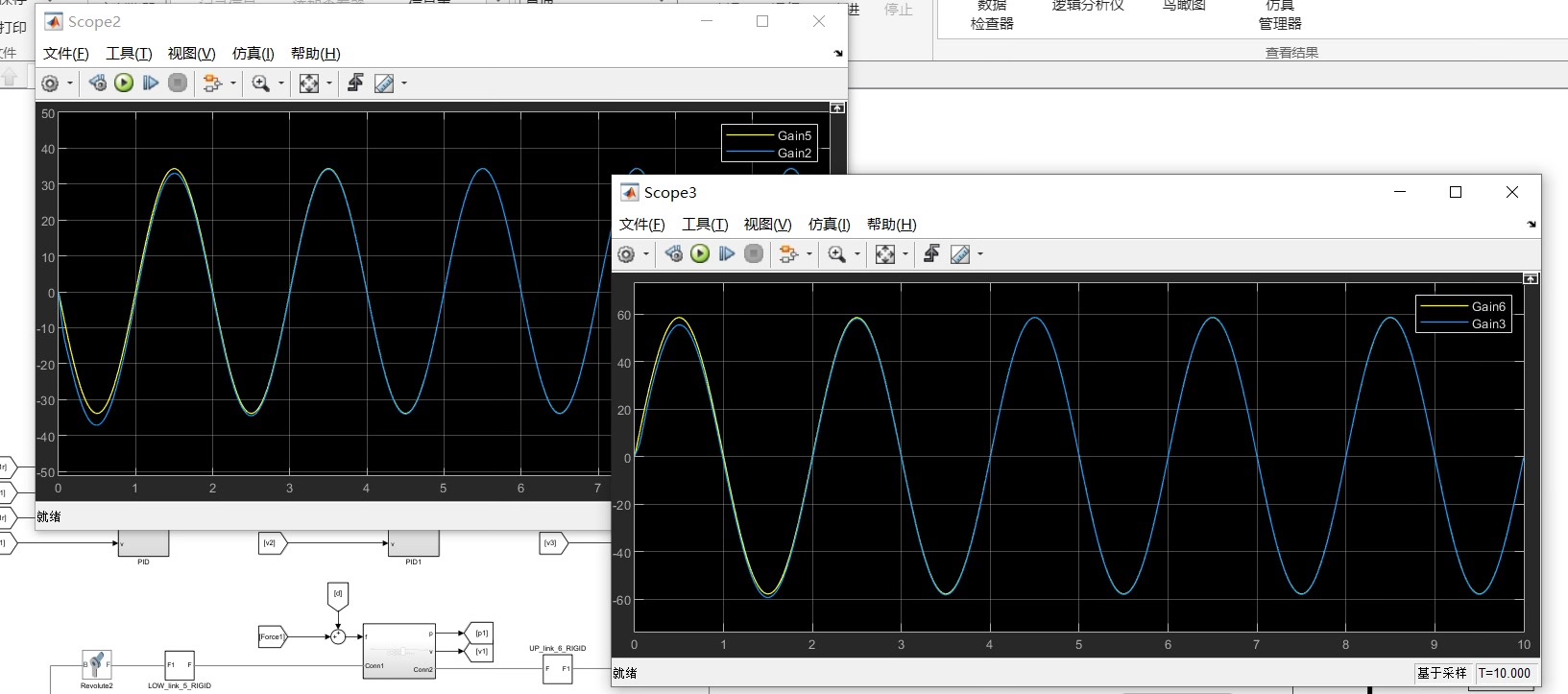
这货三条腿撑着动平台,每条腿由旋转副(R)、移动副(P)、球副(S)组成,参数耦合起来真不是一般的酸爽。最后说个避坑指南:Simscape的solver选ode23t比ode15s更适合多刚体系统,仿真速度能快三倍。调试时开着Simulink的实时参数调节功能,边看动画边拧旋钮,跟玩赛车游戏调校悬挂似的。MATLAB3-rps并联机器人动力学仿真,运动学仿真控制,simulink/simscape
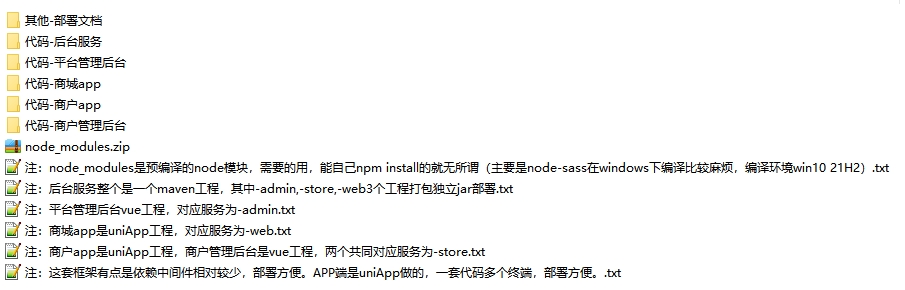
别问为啥收费,你试试通宵帮人配环境就懂了——时间才是最贵的成本。简单问题我咸鱼看到了就免费回答,不会运行的我指导你动手200,再懒一点的远程帮你搭开发环境的500,再土豪一点啥都不想动的1000包你生产环境可用。简单问题我咸鱼看到了就免费回答,不会运行的我指导你动手200,再懒一点的远程帮你搭开发环境的500,再土豪一点啥都不想动的1000包你生产环境可用。这个框架的优点就是依赖中间件比较少,部署
今天咱们就拿FVC2002的指纹库开刀,手把手整活一个能跑通的指纹识别系统。跑完整个流程后发现:同一手指不同采集样本的匹配率能到85%,但不同指纹的误匹配率也有5%。有个坑得注意:FVC2002的.tif文件自带16位深度,直接imread会得到uint8数组,这时候用mat2gray转换才不会翻车。这里我封装了gabor2d函数(篇幅限制不展开),重点是用最大响应策略——每个像素点从16个不同方

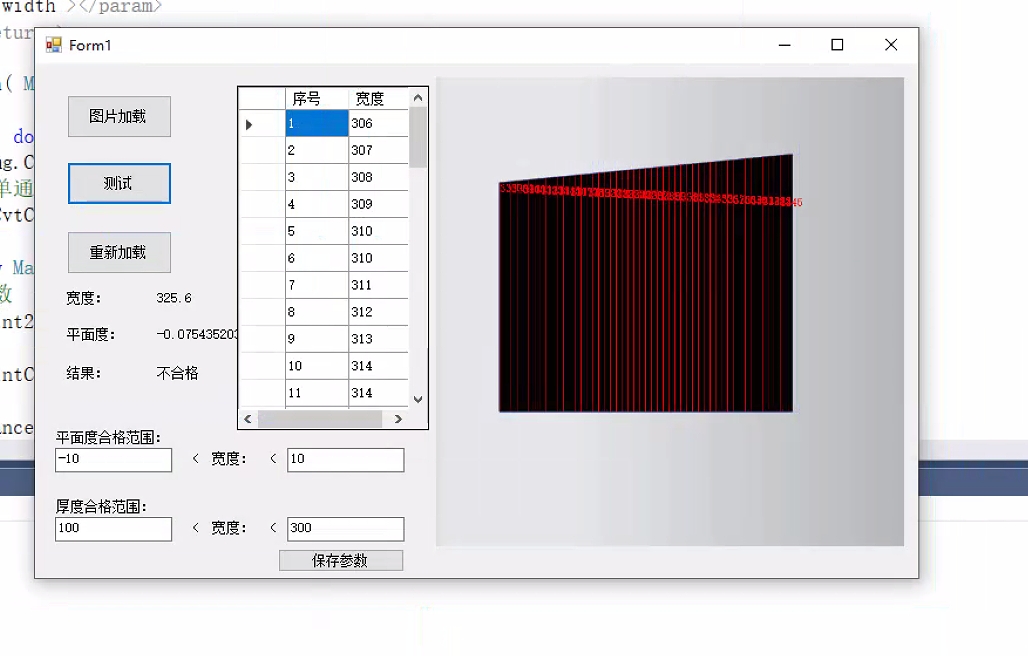
跑完代码发现个怪现象:平整区域角点分布均匀,但有折痕的地方突然冒出密集红点(图2)。后来想明白了——材料变形导致表面纹理产生不规则突变,算法把这些突变点都当角点了。老师傅拿个游标卡尺左量右测,咱们程序猿当然要琢磨怎么用代码搞定。别急,看完代码再说。但日常质检应付个把毫米级误差,这套代码足够让质检大姐少唠叨你两回了。不过CLAHE的参数要看具体材质,不锈钢和铝板的最佳参数能差三倍。06OpenCVS