- @jFWTpMJfJjq
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
整个项目最爽的部分是把PyQt5和YOLO无缝对接,看着自己设计的界面跑起目标跟踪,确实有种造轮子的快乐。这里用到的BoT-SORT跟踪算法其实是传统卡尔曼滤波和深度学习特征的混合体。最近在搞一个挺有意思的项目——基于YOLOv8的目标检测跟踪系统。这玩意儿不仅整合了最新的目标检测算法,还带完整的用户系统,从环境搭建到模型训练都踩过不少坑,这就把实战经验给大家唠唠。咱们先来说说环境搭建。3.pyq
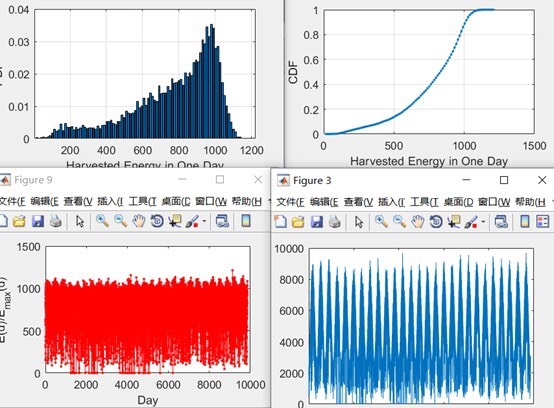
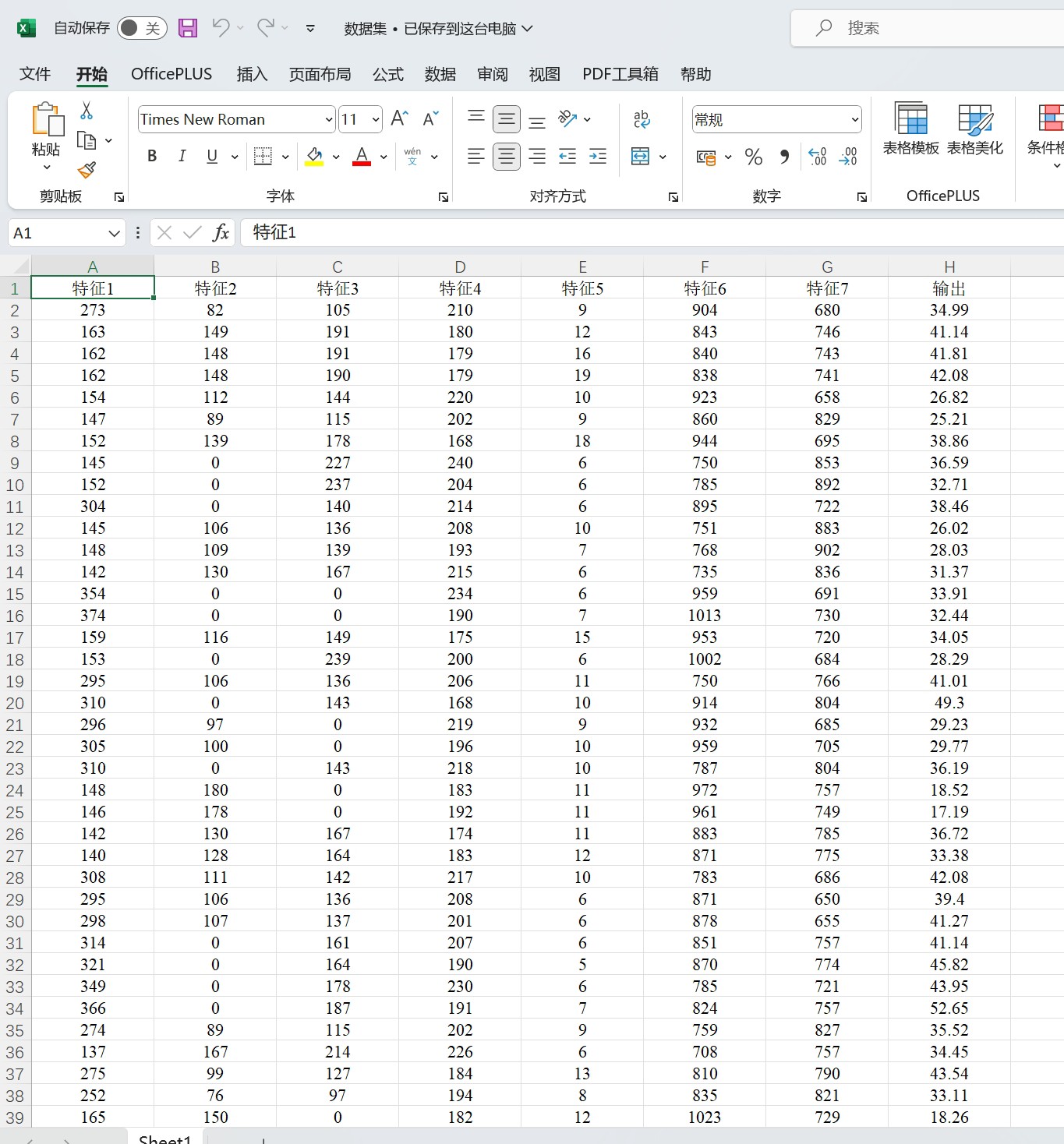
本项目是一个基于人工神经网络(ANN)的太阳辐射量预测系统,专门针对光伏电站的能源管理需求设计。系统通过分析历史太阳辐射数据,结合天文计算和机器学习算法,实现对多种天气条件下太阳辐射量的准确预测,为光伏电站的能量收集和分配提供科学依据。
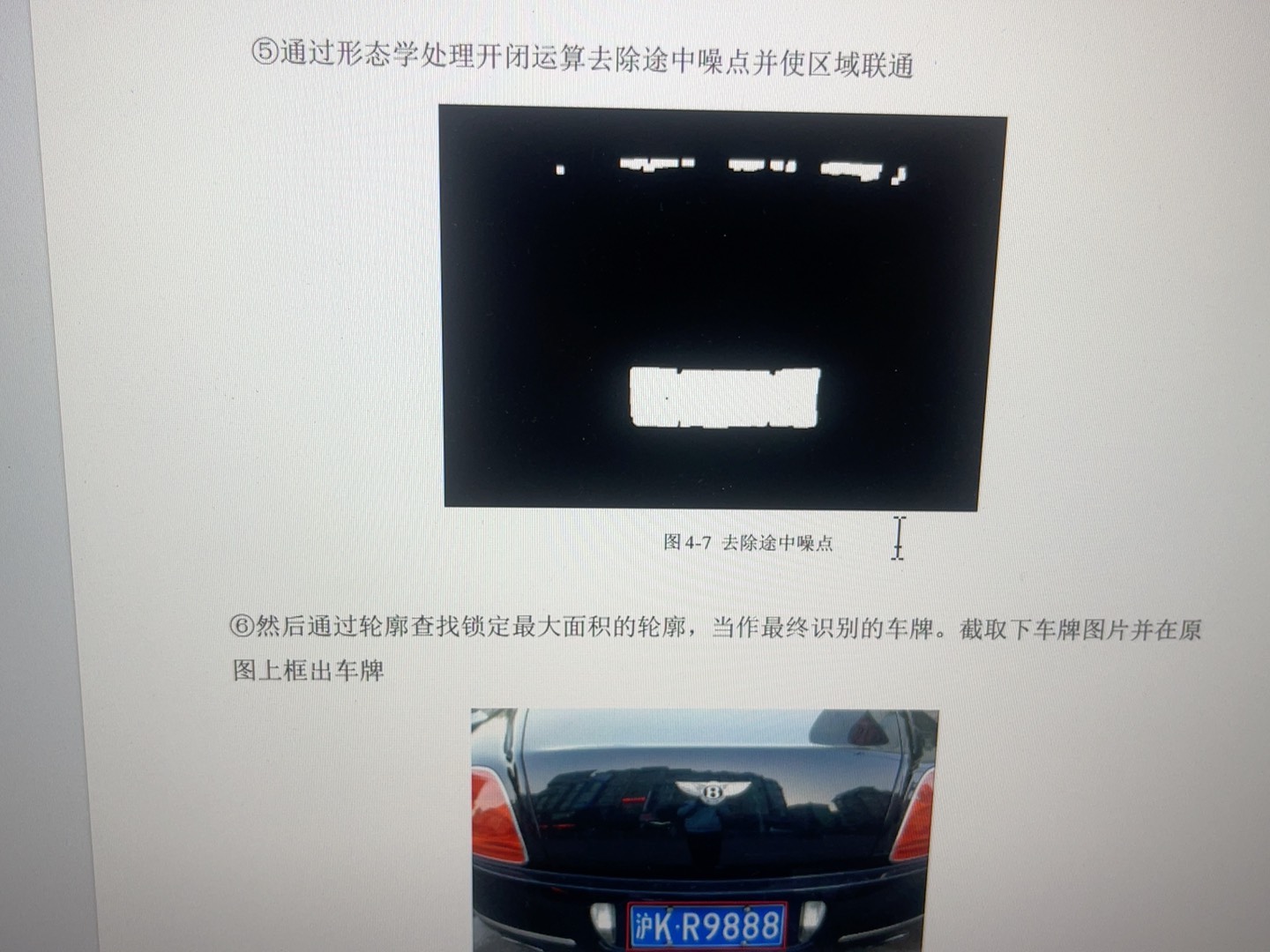
实测发现最大的瓶颈在字符识别部分,后来把Tesseract换成轻量化的CNN模型后,速度直接翻倍。这段代码里有个坑要注意:morphologyEx用的结构核尺寸(17,5)是经验值,实际用的时候得根据摄像头分辨率调整。最近在捣鼓车牌识别的小项目,发现用Python+OpenCV搞图像处理配上PyQt5做界面,效果居然还不错。有个坑是新能源车的第八位字符比较窄,容易和后面的圆点粘连,得在投影分析后加
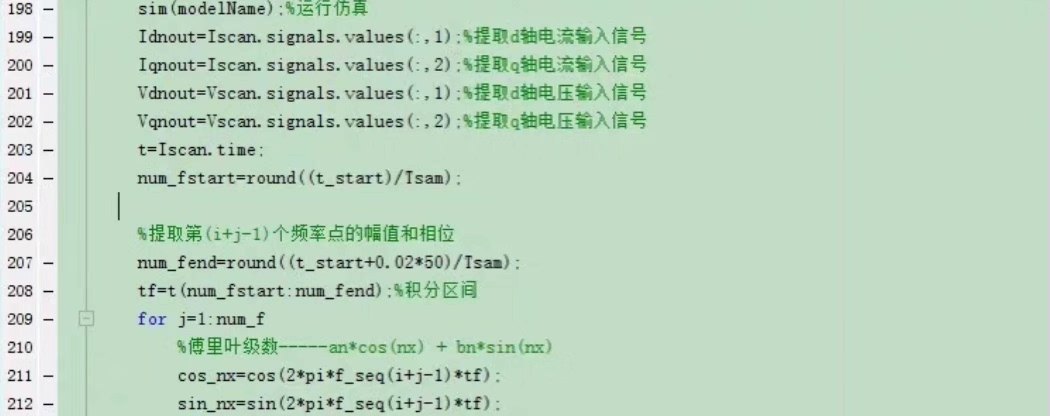
三相负载dq阻抗扫频测量,通过扫频法测量三相RLC负载的dq阻抗,注意不是序阻抗而是dq阻抗仿真组成及功能:1.主电路:由电网三相交流电源(相电压峰值311V,频率50Hz)、正负序三相交流电源和RLC负载组成2.控制模块:由主控制程序和dq变换模块组成3.观测模块:示波器仿真具体功能、特点:1.正负序三相交流电源模块由分别由5个正序电压源和5个负序电压源组成,每次运行仿真的扫频点数可自行设置,最
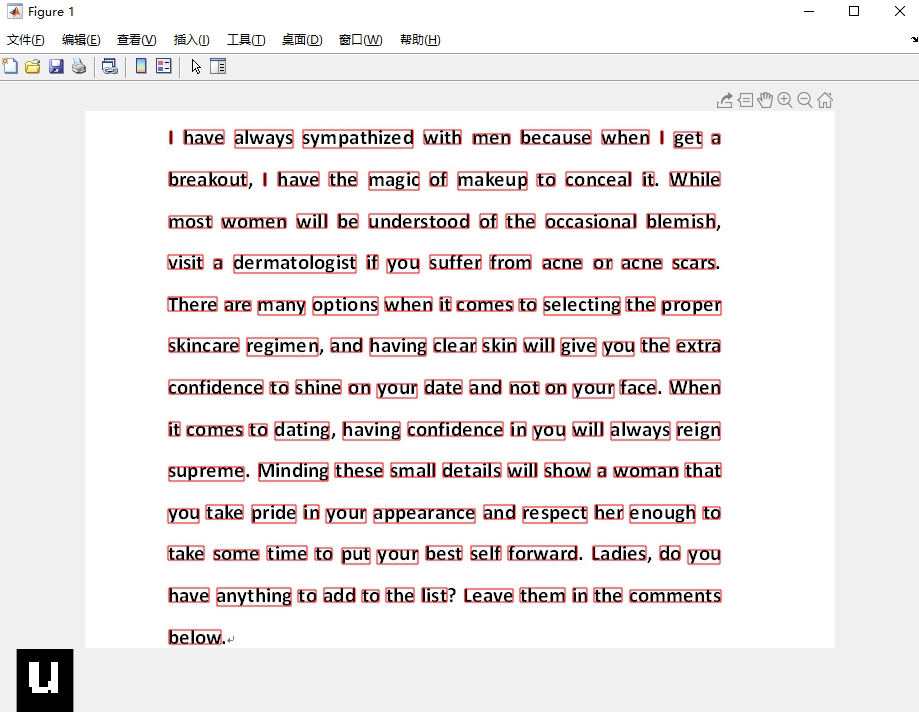
可以识别英文,当鼠标指在某个英文单词时,在坐下角会显示相关字符,原有62张图片,包括大小写A-Z和0-9用于匹配,具体可参照:https://blog.csdn.net/horseinch/article/details/51658428\\r。可以识别英文,当鼠标指在某个英文单词时,在坐下角会显示相关字符,原有62张图片,包括大小写A-Z和0-9用于匹配,具体可参照:https://blog.c
举个例子,核参数sigma的搜索范围是1e-3到1e3,但贝叶斯会自动聚焦到有效区域,避免了暴力搜索的耗时问题。基于贝叶斯算法(BO/Bayes)优化核极限学习机(KELM)的数据回归预测(可以更换为单、多变量时序预测/分类,前选一),可直接运行,适合小白新手。基于贝叶斯算法(BO/Bayes)优化核极限学习机(KELM)的数据回归预测(可以更换为单、多变量时序预测/分类,前选一),可直接运行,适
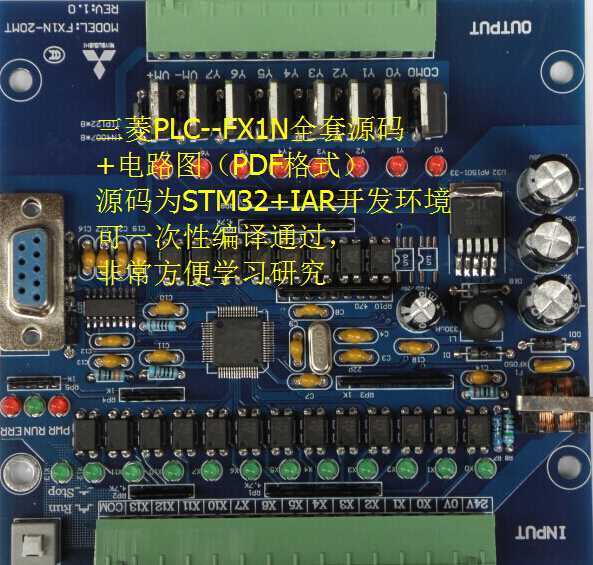
FX1N系列可编程序控制器是三菱电机推出的功能强大的普及型PLC。它具有紧凑的设计、优异的性价比,在小型自动化控制系统中应用广泛。无论是简单的顺序控制,还是较为复杂的过程控制,FX1N都能胜任。
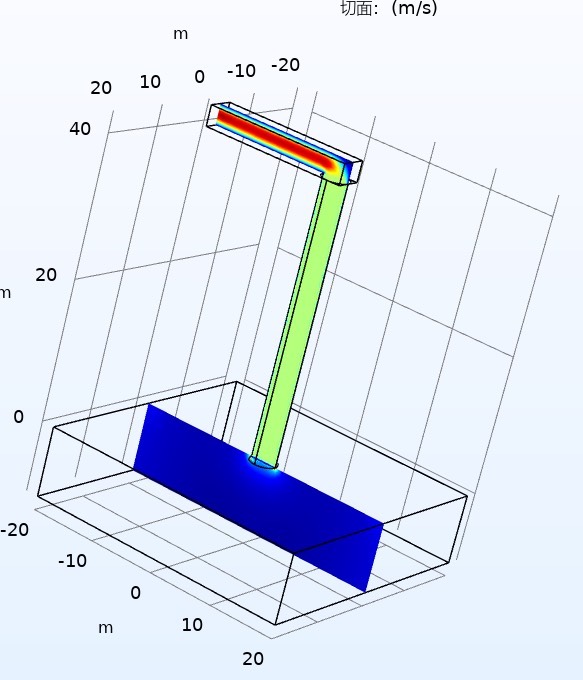
实验室里的小明最近在模拟生物黏液在组织中的渗透过程,刚接触Brinkman方程时被各种参数绕得头晕——这玩意儿和达西定律到底什么关系?有个反直觉的现象:在低渗透率区域,流速剖面会呈现"反抛物线"形态——这是因为孔隙阻力压制了粘性扩散。这时候传统的达西定律预测的线性分布失效,必须用Brinkman方程才能捕捉到边界层的速度梯度。最后说个实用技巧:当模型发散时,试试先运行稳态求解再转瞬态,相当于给数值
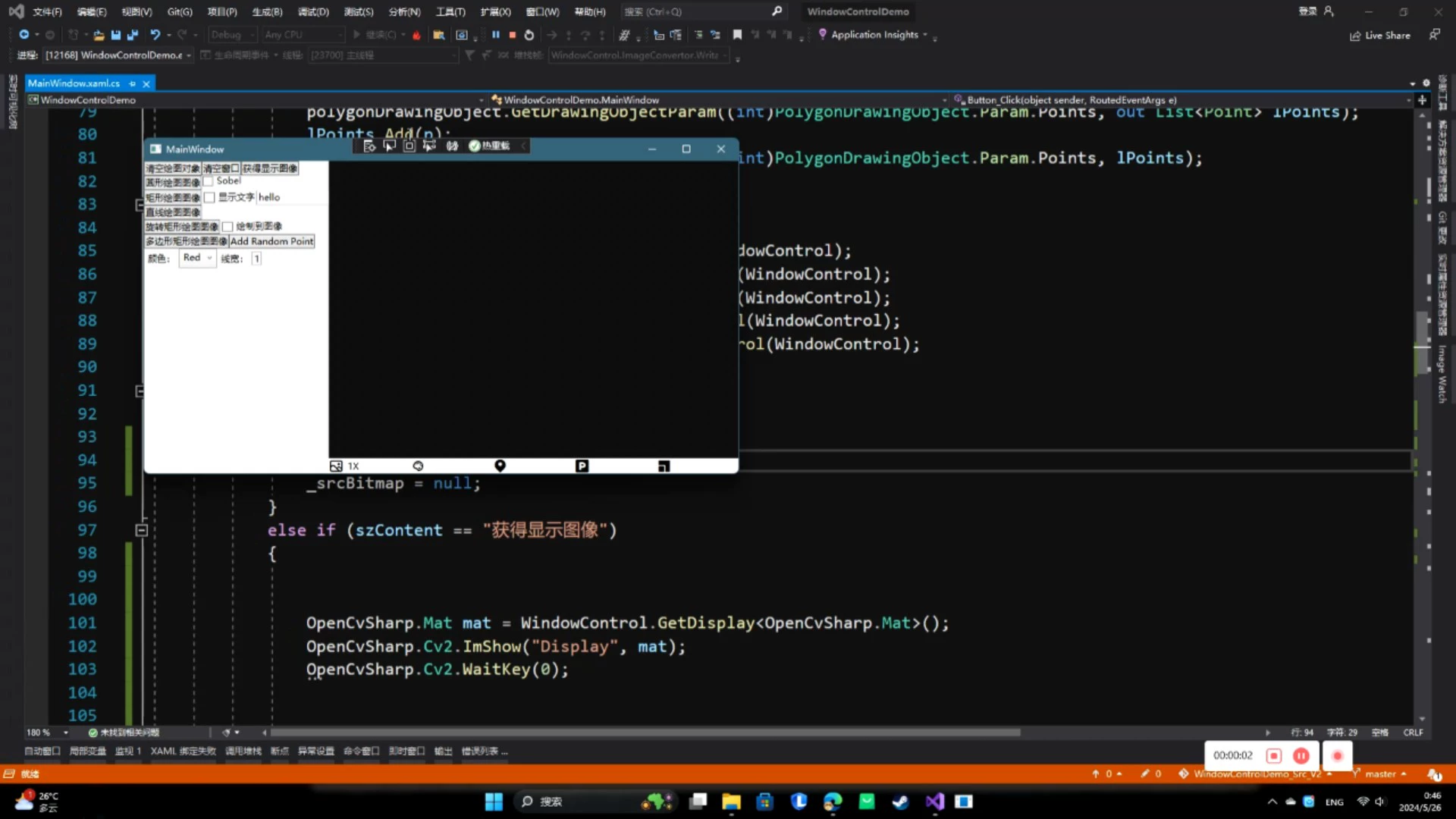
重写与,维护_visuals列表管理视觉元素;提供AddVisual方法,支持添加/移除绘图视觉对象,排除Shape类型元素(避免与绘图对象冲突)。
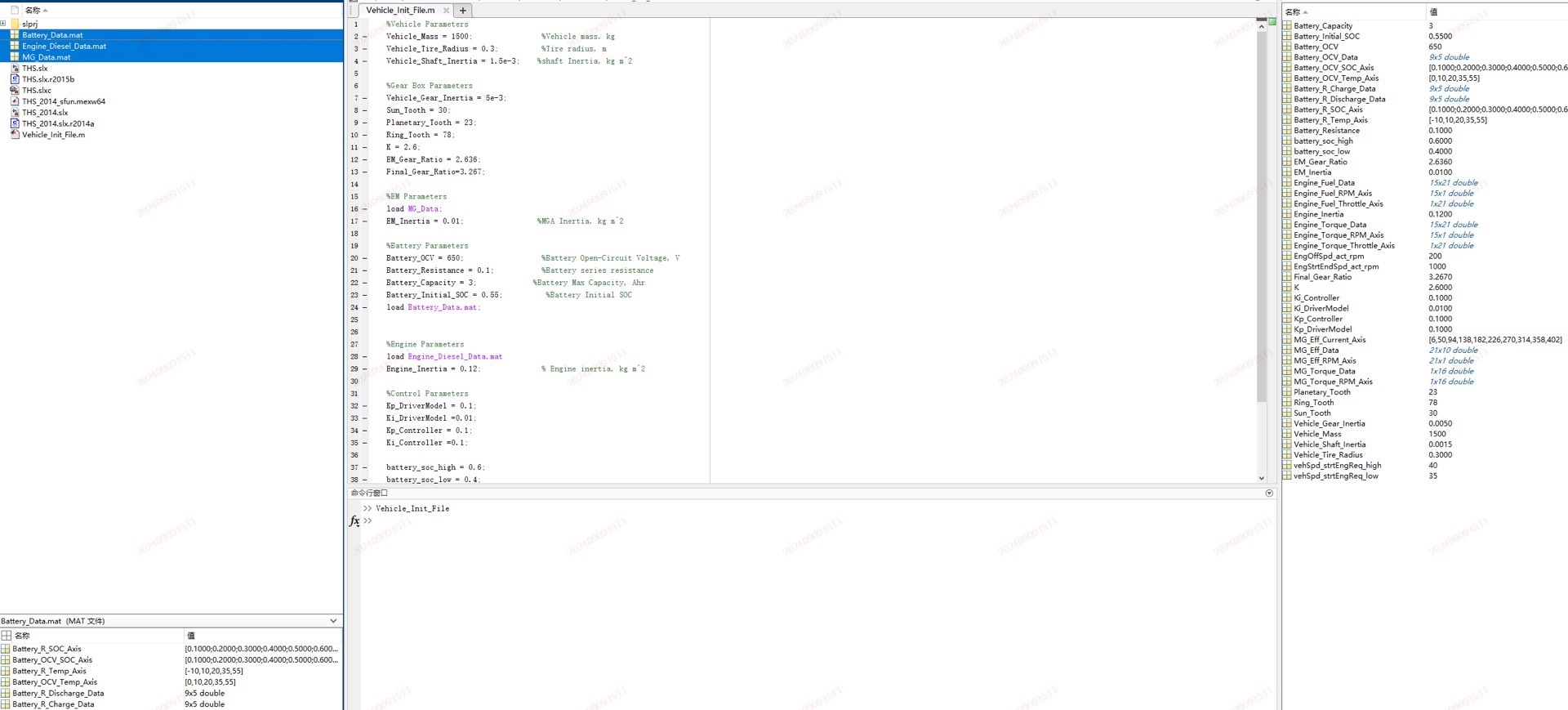
基于Matlab/simulink的丰田THS混合动力汽车建模仿真模型,包含发动机模型、发电机、电机模型、电池模型,变速箱,驾驶员模型,车轮,整车VCU控制器模型等。基于Matlab/simulink的丰田THS混合动力汽车建模仿真模型,包含发动机模型、发电机、电机模型、电池模型,变速箱,驾驶员模型,车轮,整车VCU控制器模型等。——仿真结果显示有发动机扭矩,电机扭矩,SOC变化曲线,车速跟随情况