- @vftOWpVs
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
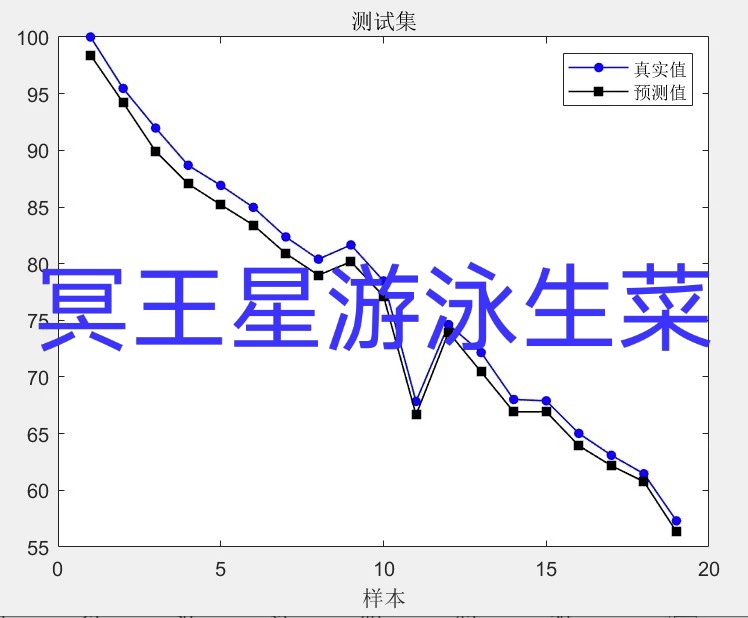
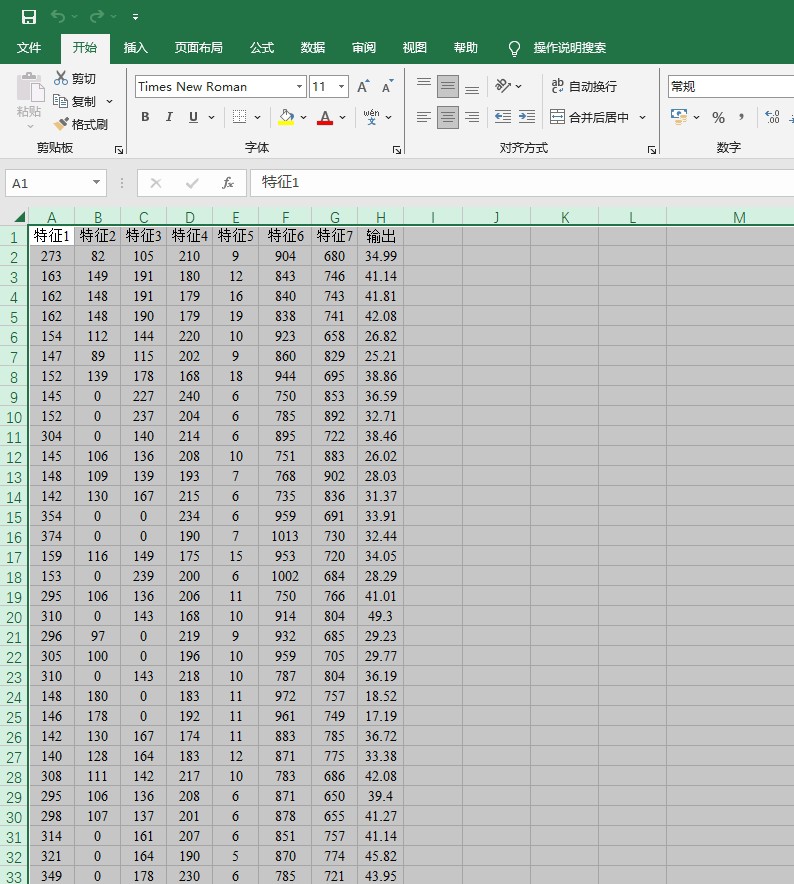
当模型开始训练时,损失曲线会经历三个有趣阶段:初始的剧烈波动像过山车、中期的稳定下降如滑梯、后期的细微调整仿佛钟表匠在调校齿轮。在NASA实验室里,四组编号B0005-B0008的电池数据正安静地躺在服务器里,等待工程师们破解它们的健康密码。在数据预处理阶段,用户可以自行完成SOH(State of Health)的计算,然后通过pso-LSTM神经网络进行预测。在数据预处理阶段,用户可以自行完成
基于STM32H750芯片和SOEM的EtherCAT主站源码 提供配套CUBE工程和。SOEM协议栈使用1.3.1版本。可配套如图所示开发板使用。支持DC同步。可配合汇川IS620N、三洋RS3、赛孚德ASD620B、埃斯顿ProNet、迈信EP3E、台达A2-E、伟创SD700、松下A5B/A6B和欧姆龙G5系列驱动器使用,或提供想适配的驱动器型号。EtherCAT作为一种高效的实时工业以太网

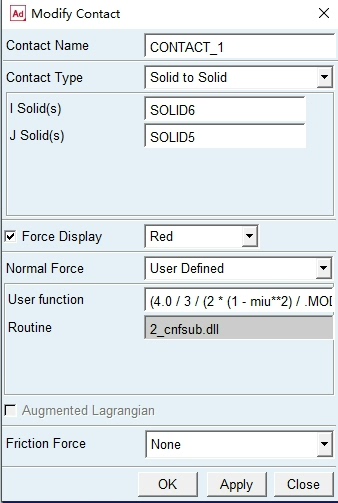
多体动力学方法建立含间隙铰关节机构动力学方程,理论方程MATLAB数值计算编程+ADAMS仿真分析(可嵌入自编接触力模型,.dll文件动态链接库生成方法视频)adams的不是仿真模型,matlab程序一套,Adams自定义接触力函数关联adams仿真方法视频一个 这套模型很难调收敛性价比高,支持和。系统采用进行数值积分,适用于求解刚体系统的动力学响应。
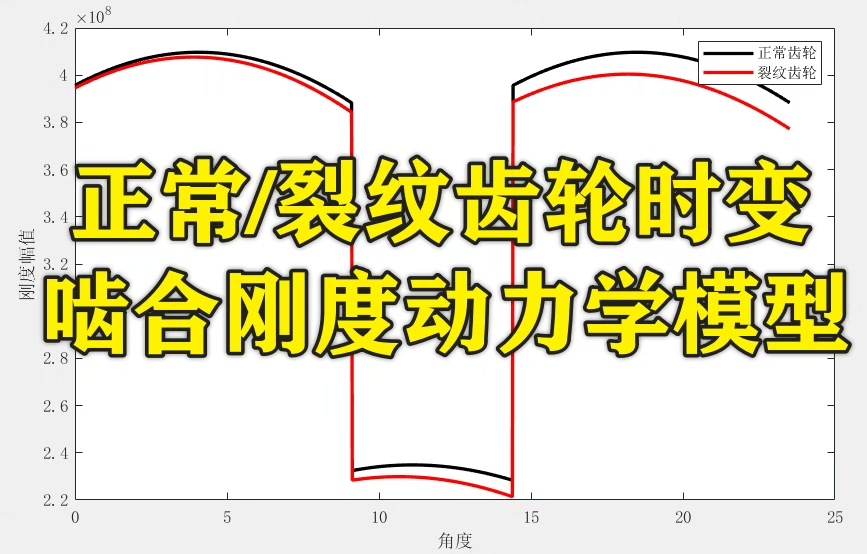
通过这些步骤,我们不仅能够计算齿轮的几何参数和刚度,还能直观地看到裂纹对齿轮刚度的影响。接下来是重头戏——刚度计算。(4)刚度计算:使用t自定义函数,计算齿轮的刚度,包括轴向刚度、径向刚度、齿面刚度和齿侧刚度。(4)刚度计算:使用t自定义函数,计算齿轮的刚度,包括轴向刚度、径向刚度、齿面刚度和齿侧刚度。(5)裂纹影响的刚度计算:考虑裂纹对齿轮刚度的影响,计算裂纹齿轮的刚度。(5)裂纹影响的刚度计算
当模型开始训练时,损失曲线会经历三个有趣阶段:初始的剧烈波动像过山车、中期的稳定下降如滑梯、后期的细微调整仿佛钟表匠在调校齿轮。在NASA实验室里,四组编号B0005-B0008的电池数据正安静地躺在服务器里,等待工程师们破解它们的健康密码。在数据预处理阶段,用户可以自行完成SOH(State of Health)的计算,然后通过pso-LSTM神经网络进行预测。在数据预处理阶段,用户可以自行完成
GA-Elman回归基于遗传算法(GA)-简单递归神经网络(Elman)的数据回归预测(可更换为单变量和多变量时序预测,前私),Matlab代码,可直接运行,适合小白新手无需更改代码替换数据集即可运行数据格式为excel前GA可更换为SSA,CPO,NRBO,TTAO,GWO,WOA,RIME等需要其他内容均可定制1、运行环境要求MATLAB版本为2019b及其以上2、评价指标包括:R2、MAE、
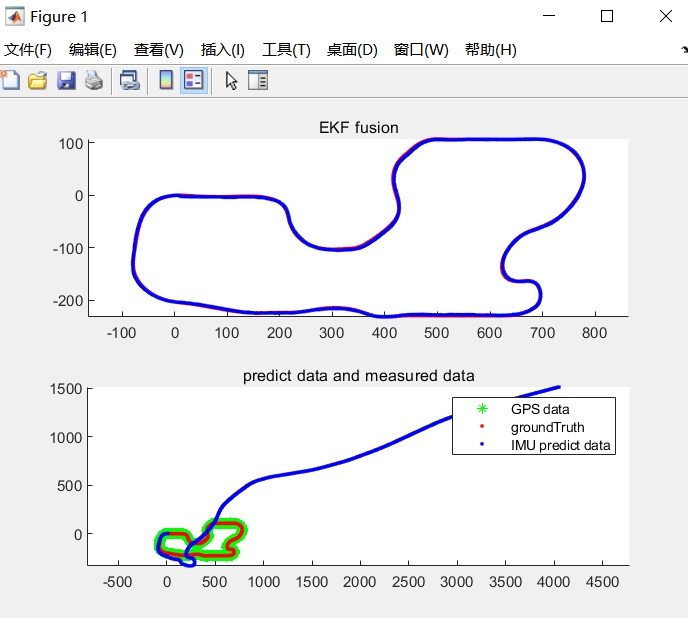
姿态:以单位四元数(\(q0, q1, q2, q3\))表示,避免欧拉角奇异性;位置:ENU(东–北–天)坐标系下的三维坐标(\(pn, pe, p_d\));速度:ENU系下的三维速度(\(vn, ve, v_d\));IMU偏差:陀螺仪三轴零偏(\(b{gx}, b{gy}, b{gz}\))与加速度计三轴零偏(\(b{ax}, b{ay}, b{az}\))。通过将传感器偏差纳入状态向量,
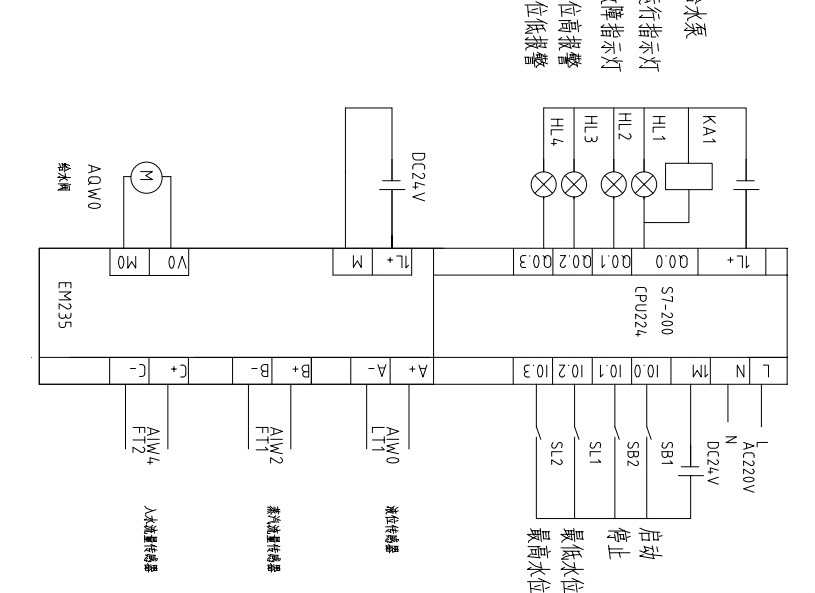
预热锅炉水位控制系统旨在确保锅炉内水位维持在合适范围,避免因水位过高或过低引发安全事故及影响生产效率。西门子 S7 - 200 PLC 作为核心控制器,负责采集水位传感器数据,并依据预设逻辑进行运算处理,进而控制水泵等执行机构。组态王软件则用于构建友好的人机界面(HMI),方便操作人员实时监控和干预系统运行。进入组态王的变量定义界面,定义与 PLC 交互的变量。例如,定义一个名为“WaterLev
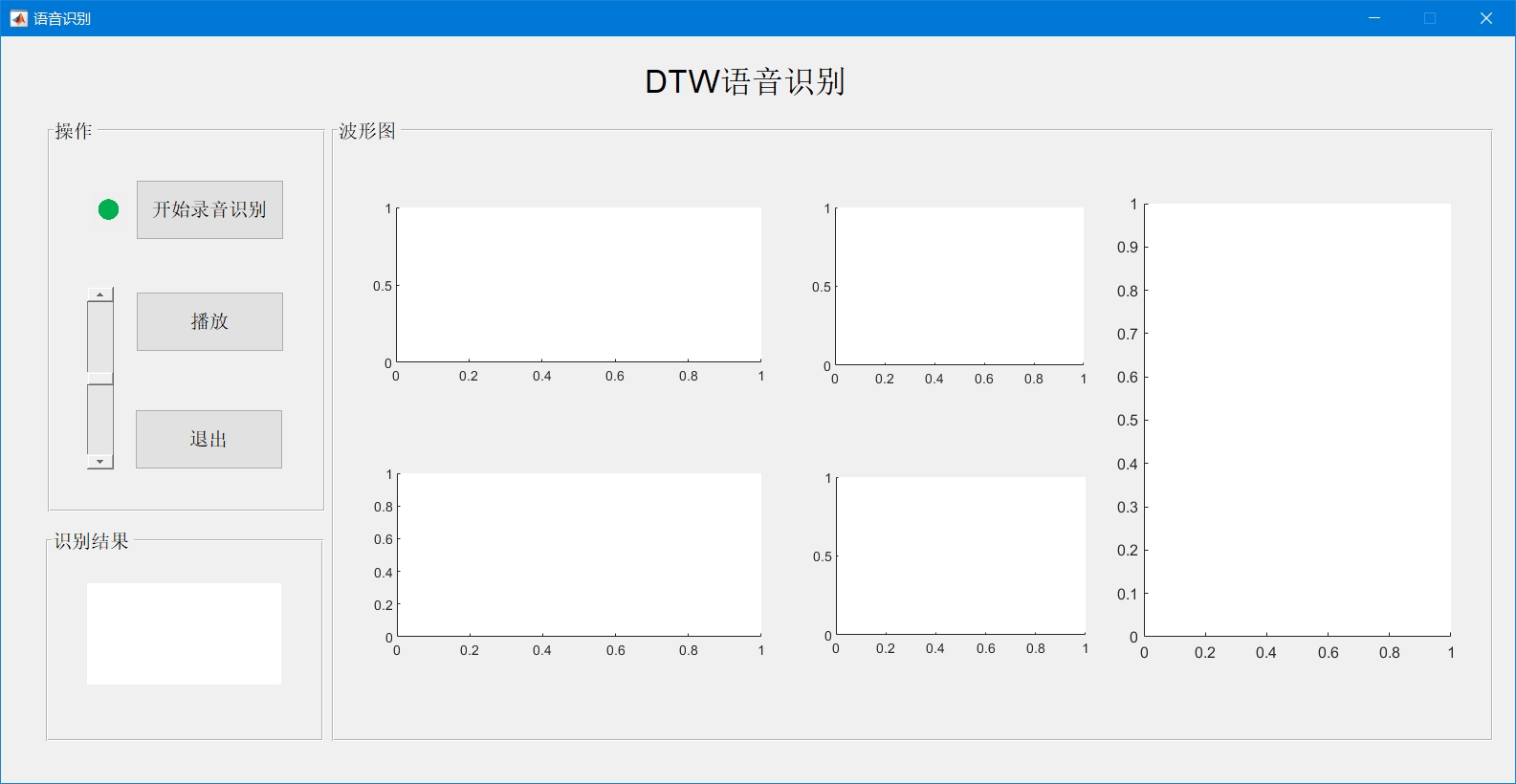
本系统是基于MATLAB平台开发的特定人孤立词语音识别系统,核心功能为识别0-9共10个数字语音。系统采用动态时间规整(DTW)算法实现语音特征匹配,结合梅尔频率倒谱系数(MFCC)提取语音关键特征,通过图形用户界面(GUI)提供直观的人机交互,涵盖语音采集、预处理、特征提取、模板训练与识别全流程,可满足基础数字语音识别场景的功能需求。
本文将详细介绍一种基于三环位置速度电流伺服控制系统的控制模型,采用线性自抗扰(LADRC)控制和电流转矩前馈控制方法,以提高系统的控制效果和稳定性。位置环LADRC 然后把位置环和速度环整合成一个环 所以整体是位置速度复合环+电流环 电流环用的PI 线性自抗扰+转矩前馈 中间那一段时间的波动是加入扰动的时间。位置环LADRC 然后把位置环和速度环整合成一个环 所以整体是位置速度复合环+电流环 电流