- @aoqDrPjNRbKr
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
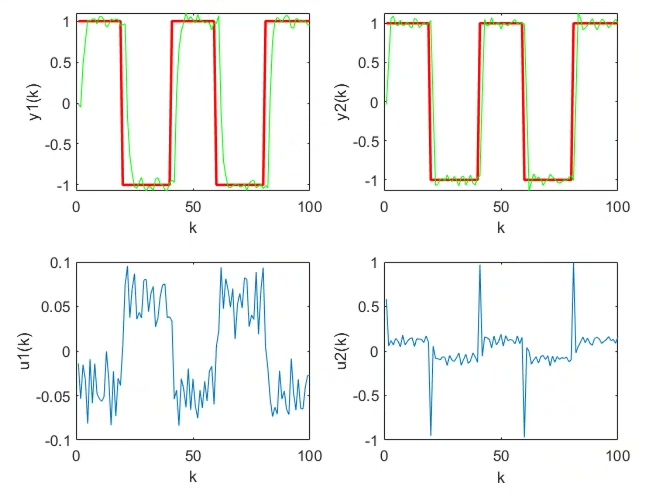
广义预测控制是一种基于模型的预测控制方法,与传统的PID控制不同,它通过预测系统未来的状态和输出,优化当前的控制输入,从而实现更优的控制效果。MPGC的核心思想在于结合系统模型,预测未来的输出,并基于预测结果选择最优的控制策略。它特别适用于非线性系统和存在外部干扰的场景。不过,MPGC也有一些缺点,比如计算量较大,对模型精度要求较高。为了验证其有效性,我们选择了一个典型的水下机器人控制系统进行仿真
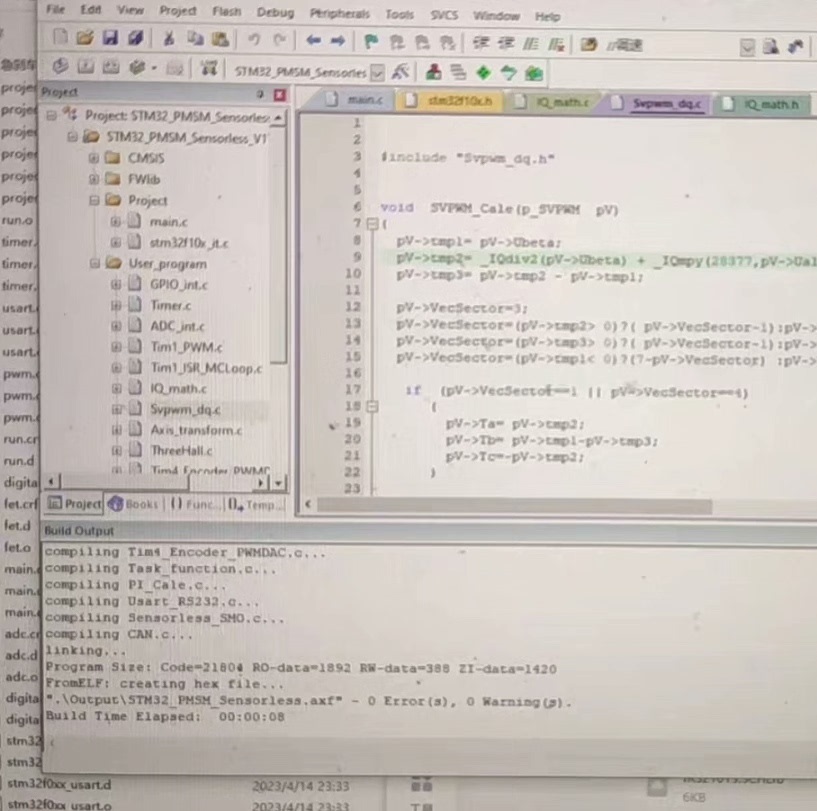
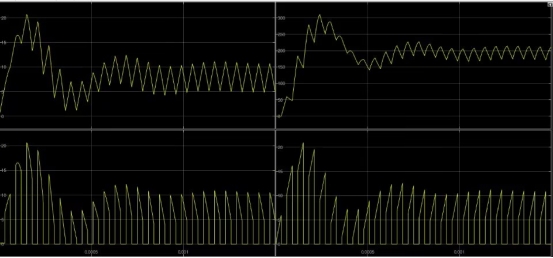
无感FOC这玩意儿玩起来总让人又爱又恨,尤其是观测器这块,传统龙伯格观测器搞不好就给你整出相位延迟。最近在STM32F103上捣鼓了个滑膜观测器的方案,实测电机启动那叫一个丝滑,连编码器都省了,关键代码全开源你敢信?最后吐槽下,开源包里原理图有个彩蛋——MOS驱动部分居然用TVS管代替常规的栅极电阻,实测开关损耗降低不说,还省了散热片的空间。算法采用滑膜观测器,全开源c代码,全开源,启动顺滑,提供
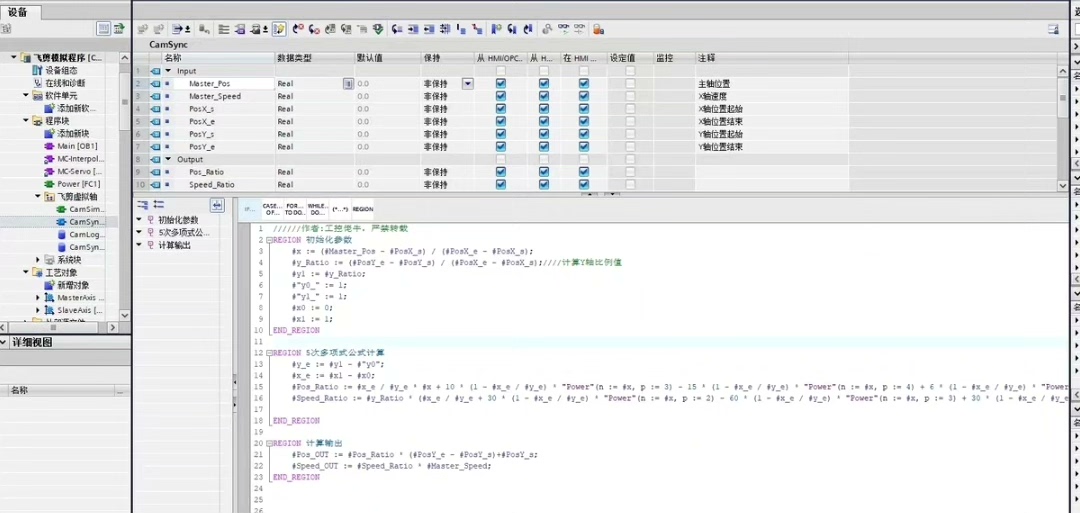
要想用凸轮功能,得用1500T,但1500T的价格实在是有点高,不太适合预算有限的项目。于是,我决定另辟蹊径,通过研究飞剪算法,用5次多项式来计算刀轴的运动曲线,最终实现了用1500PLC也能完成飞剪功能。必须用1500T才可以实现,由于1500T价格高,该程序通过研究飞剪算法,采用5次多项式计算刀轴的运动曲线,必须用1500T才可以实现,由于1500T价格高,该程序通过研究飞剪算法,采用5次多项
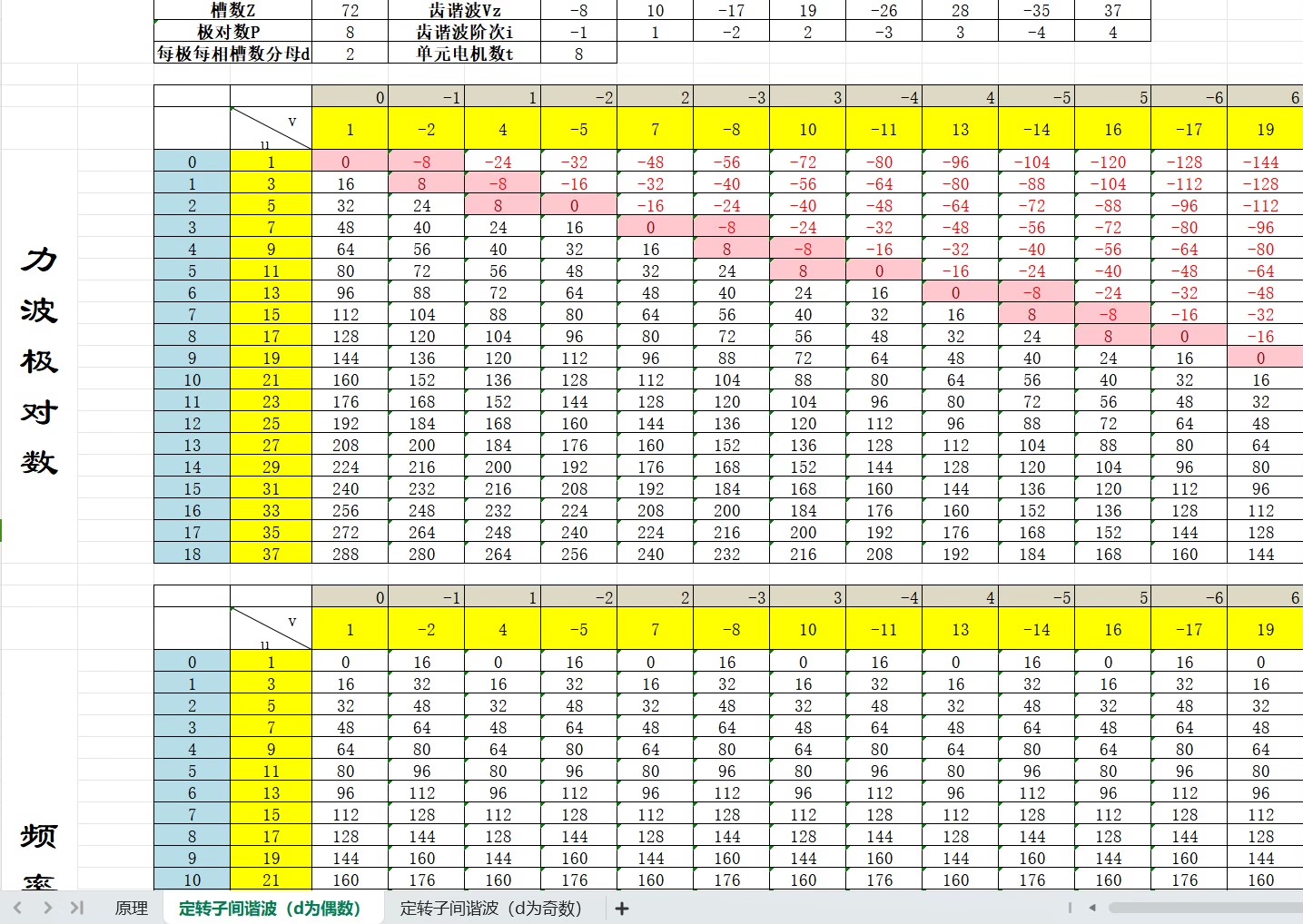
电磁力波阶次计算表,永磁同步电机径向电磁力波阶次数计算表。#永磁同步电机噪声分析。在永磁同步电机的研究与应用中,噪声问题一直备受关注。而径向电磁力波是导致永磁同步电机产生噪声的重要因素之一,对其阶次进行准确计算,是深入分析电机噪声来源和特性的关键步骤。今天咱们就来聊聊永磁同步电机径向电磁力波阶次数计算表以及背后的门道。
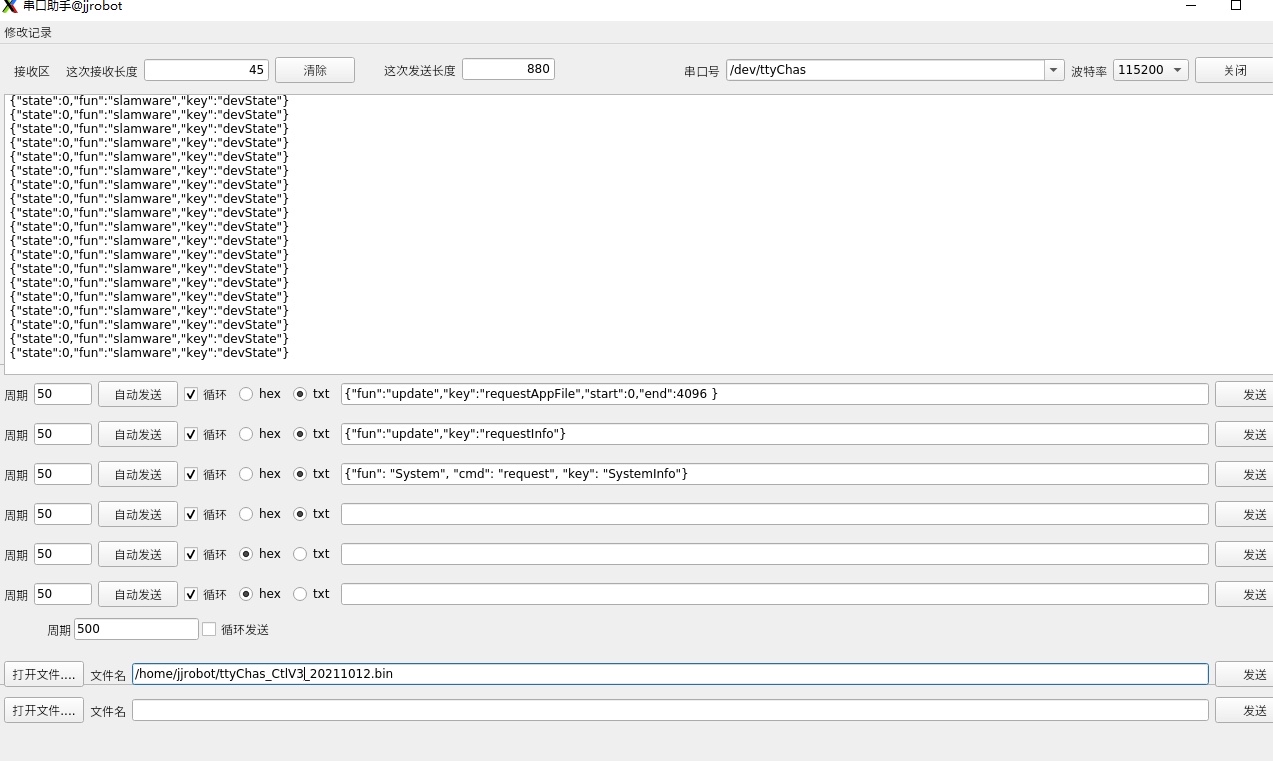
想要更快速度可以试试DMA接收,不过对资源有限的芯片来说,普通中断接收模式已经够用。代码仓库里已经放了配套的工程文件,需要的老铁自取。最近在玩STM32远程升级功能的时候,发现用串口实现IAP(应用内编程)真是个经济实惠的方案。今天咱们就手把手搞个能实战的升级系统,配合自己写的上位机工具,直接撸代码说重点。这段代码的关键在于操作MSP指针和PC指针。注意在跳转前必须复位所有外设,否则残留的中断标志
105Simulink直流斩波降压电路,在电力电子领域,直流斩波电路是实现直流电压变换的重要手段,其中降压斩波电路更是应用广泛。今天就借助Simulink来深入剖析105Simulink直流斩波降压电路。
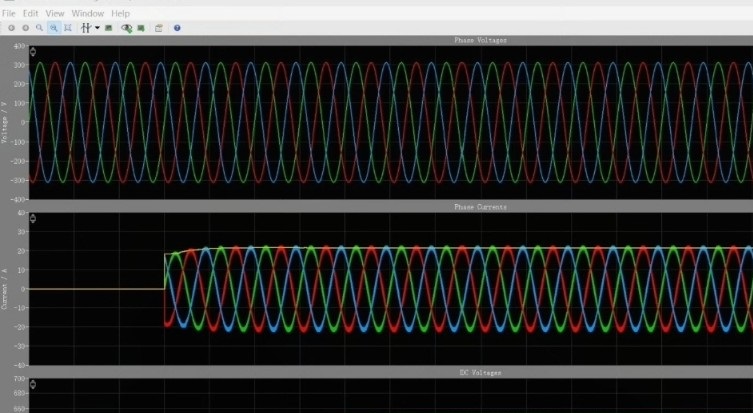
通过采用SPWM调制方式和电压电流双闭环控制方式带前馈的控制策略,本模型实现了对电力系统的有效控制和稳定输出。本文将介绍在plecs(Power Electronics Control Simulation)仿真软件中建立的三相六开关PFC模型,并详细阐述其平均电流调制方式为SPWM及电压电流双闭环控制方式带前馈的控制策略。在plecs版本8.2的仿真环境中,我们成功构建了该模型,并通过仿真得到了
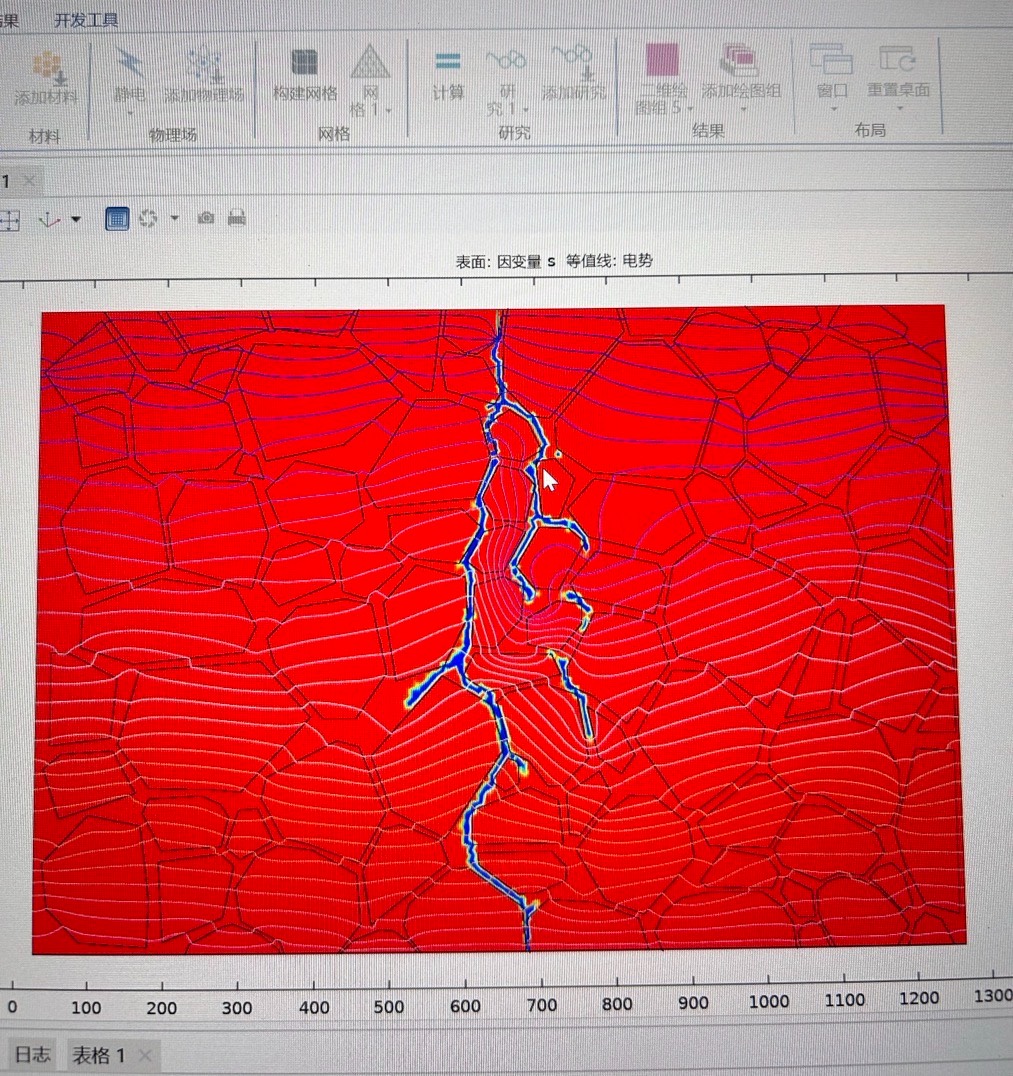
下图展示了击穿过程中电势分布的变化:初始阶段电场均匀分布(图a),随着局部击穿发生,电势线在损伤区域明显弯曲(图b),最终形成贯穿性导电通道(图c)。有意思的是,当我们在方程中加入各向异性项时,会发现电树枝分叉角度出现明显变化——这解释了实际击穿路径为何呈现60°-120°的典型分叉结构。通过参数扫描发现,当施加场强达到临界值的1.2倍时,击穿路径的分形维度会从1.6突增至1.9,这与实验观测的雪
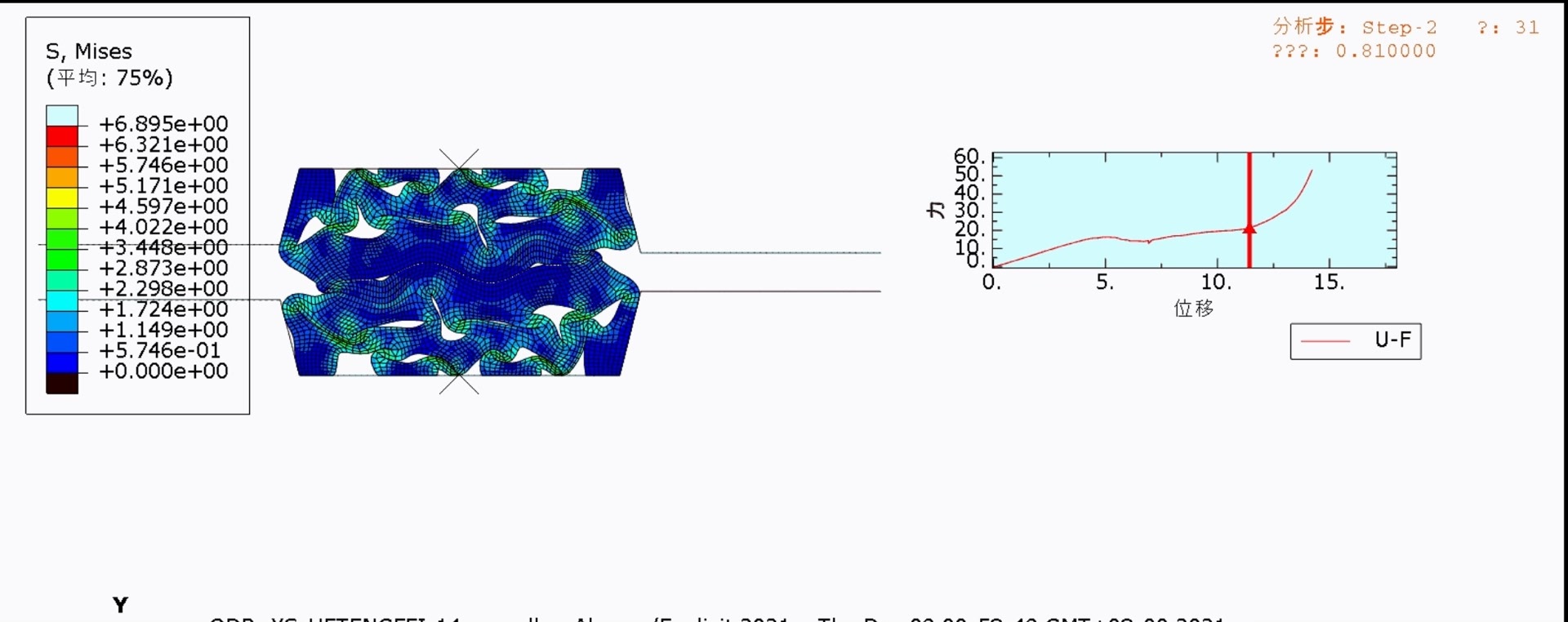
通过本次研究,我们成功利用ABAQUS模拟了复合式密封垫在压缩载荷下的变形特性,验证了Mooney-Rivlin模型在橡胶材料分析中的适用性。同时,我们也体会到数值模拟与试验结合的重要性。未来,我们可以进一步优化模型,例如考虑材料的非线性行为或更复杂的接触条件,以提高模拟的精度和适用性。总之,ABAQUS等数值模拟工具为工程实践提供了有力支持,尤其是在复杂结构和材料分析方面,其作用不可替代。
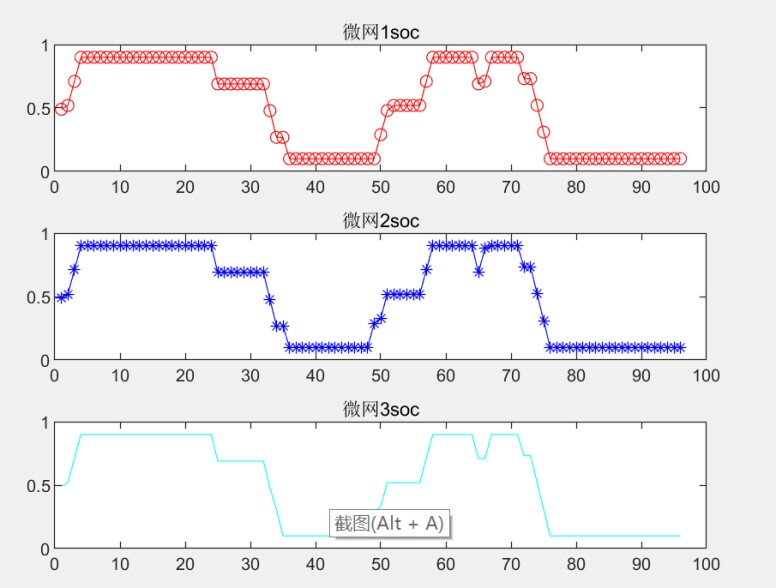
微网双层优化模型matlab采用yalmip编写三个微网的分层优化模型,考虑电价的负荷响应,综合配电网运营商收益和用户购电成本,程序运行稳定在能源领域,微网的优化运行一直是个热门话题。今天就来聊聊用Matlab结合Yalmip编写三个微网的分层优化模型,还考虑了电价的负荷响应,同时兼顾综合配电网运营商收益和用户购电成本,并且程序运行超稳哦!