- @2508_94224262
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
人脸识别算法源码SDK开发包人证比对二次开发检测核验开发包在当今数字化时代,人脸识别技术已经广泛应用于各个领域,从安防监控到金融支付,其重要性不言而喻。而人脸识别算法源码、SDK开发包以及人证比对二次开发检测核验开发包,更是推动这一技术落地应用的关键要素。

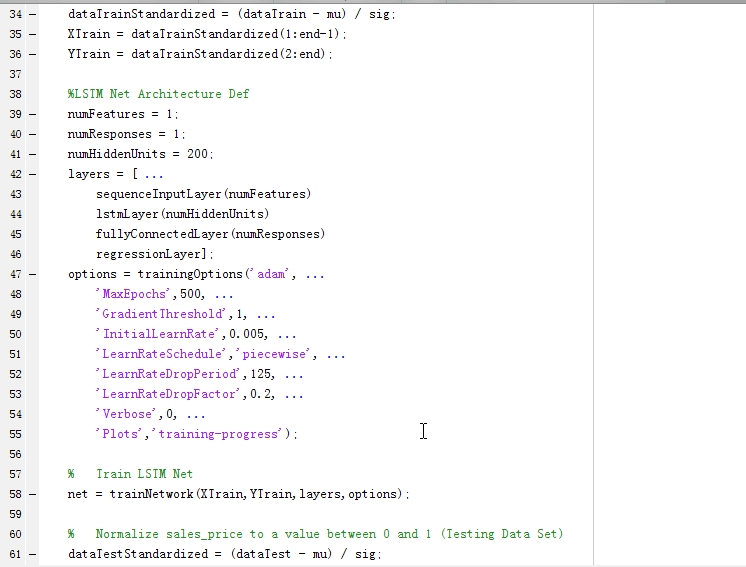
实测下来,电力负荷数据的RMSE能压到0.3以下,R²稳定在0.97左右。关键在MiniBatchSize的设置,太小会导致震荡,太大内存扛不住。我一般按时间轴切分,前80%训练,后20%验证。最近在折腾时间序列预测,试了试Matlab自带的LSTM工具箱,发现这玩意儿比想象中好用。直接上实战经验,先说清楚这货的预测效果确实能打,特别是对周期性明显的数据,误差能压到肉眼难辨的程度。LSTM算法做时
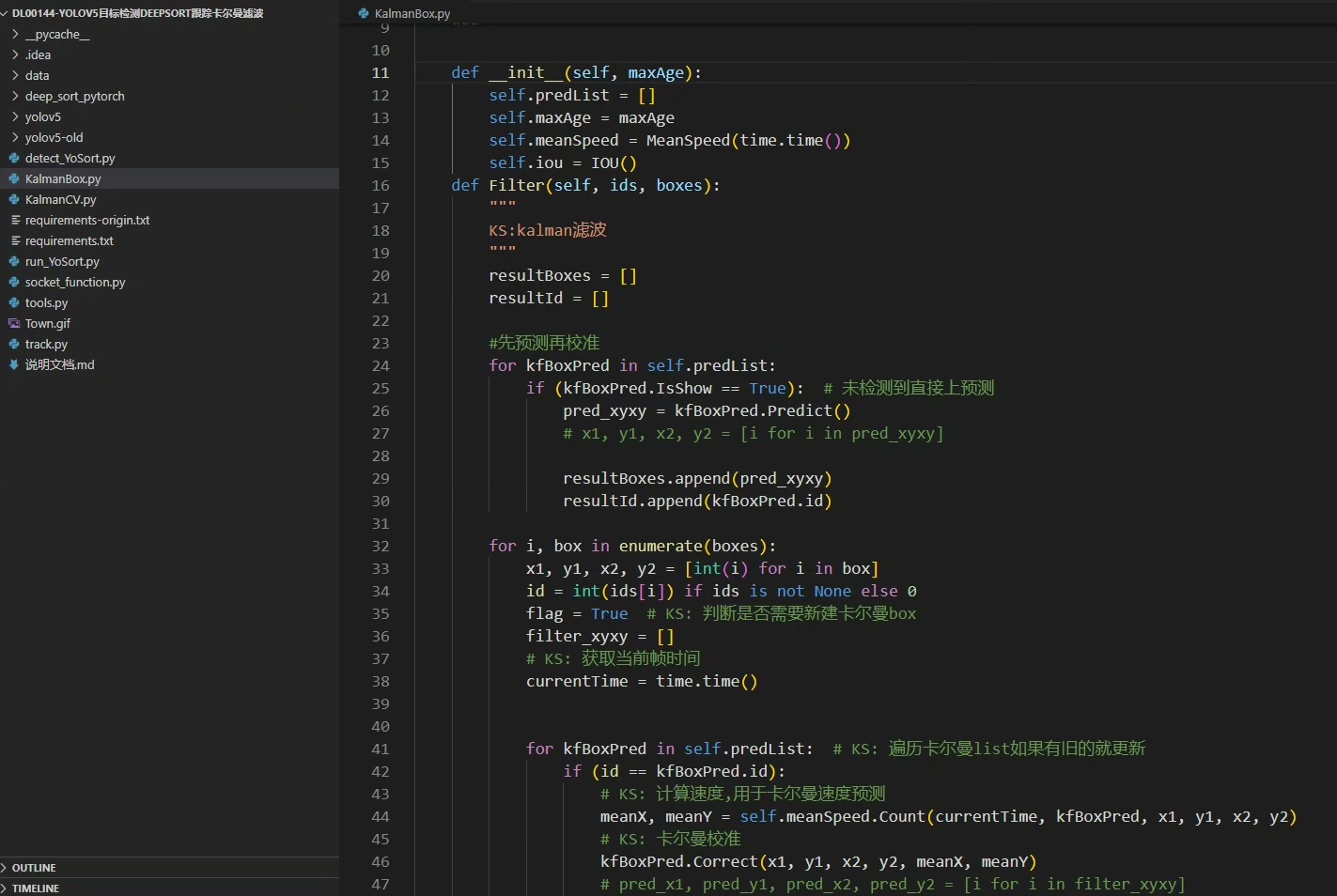
实测在无人机航拍场景中,目标ID维持准确率提升了23%,框坐标抖动幅度减少了60%以上。当目标运动速度较快时,适当增加预测值的权重,相当于给检测框加了个低通滤波器。模式时,系统每隔30帧才做一次完整检测,其余时间仅靠卡尔曼滤波进行运动推演。这样即使某个目标被短暂遮挡,当其重新出现时,系统会优先匹配运动轨迹最连贯的ID,而不是随便分配新ID。更新纯卡尔曼预测目标框, 减少检测消耗--kalman_p
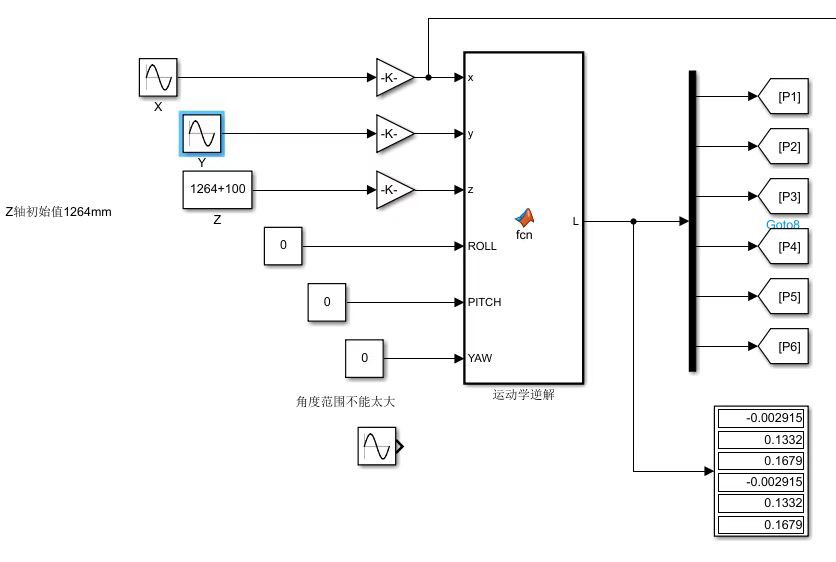
最后验证下精度:给定位姿[X=0,Y=0,Z=500mm,Roll=0,Pitch=0,Yaw=0],算法算出的杆长和Simscape实际测量值误差在0.01mm级别。先剧透下最后效果——给定位姿参数,Simulink模型能自动算出六根驱动杆的伸缩量,还能看实时运动动画。Simulink部分搭建两个关键路径:一个是算法计算杆长的MATLAB Function模块,另一个是Simscape的物理模型
"玩过机器人跟随项目的兄弟应该都见过这种场景:几台设备嘀嘀嘀互相定位,主机实时追踪从机方位。这短短二十行代码干了三件大事:把原始相位差转成角度值,处理±180度边界问题,外加一个滑动平均滤波。注意那个32768的魔数——其实对应着16位有符号数的最大值,说明原厂直接用了ADC的原始数据。配套的Windows评估工具其实是个宝藏,它的3D视图用了DirectX的粒子特效,但核心算法和Linux版本同
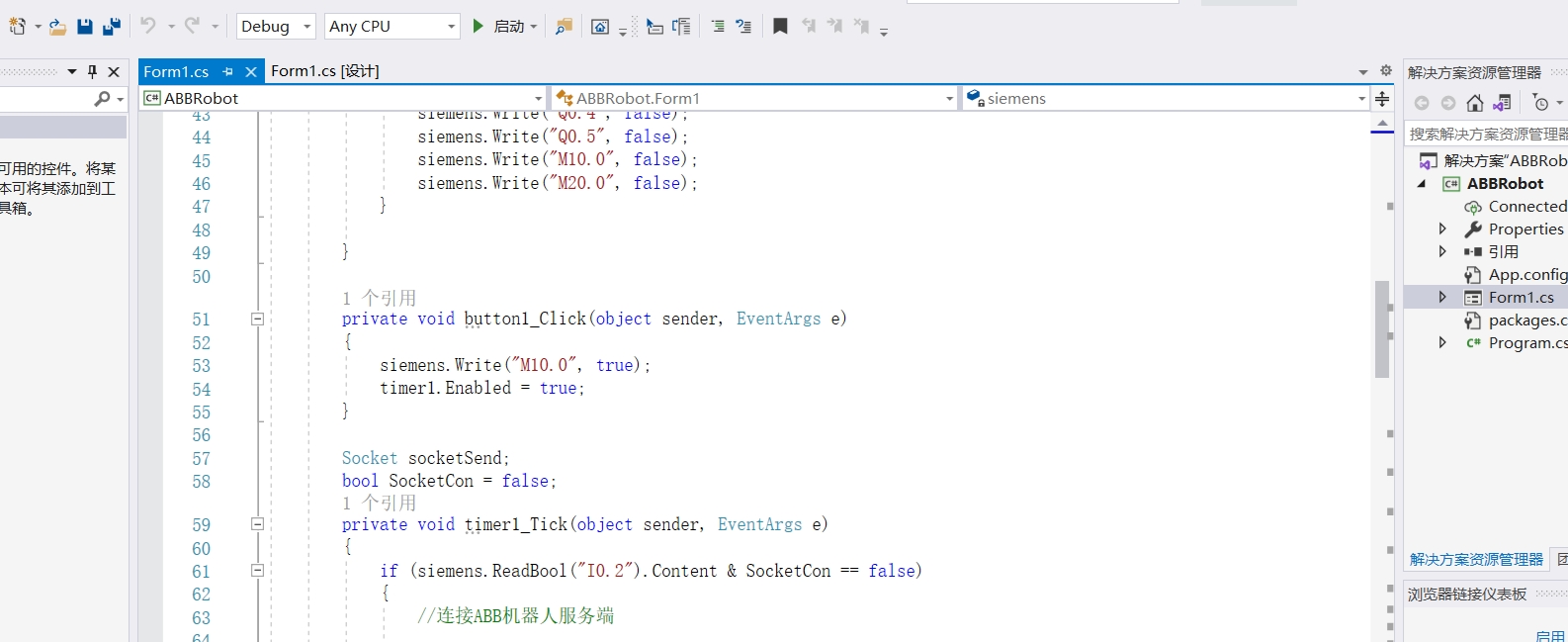
自己写的程序,也能给大伙提供部分,要是有小伙伴想自己提升学习,研究研究这个案例,说不定能收获不少呢。从ABB机器人的运动指令控制,到上位机和机器人、PLC的以太网通讯,这一套流程下来,对自动化控制这块的理解又能上一个台阶。最近搞了个项目,用到了 ABB 蜘蛛机器人,顺带把 PLC 和 C# 上位机通讯啥的都整明白了,今儿个就来给大伙唠唠。再说上位机和机器人以及 PLC 的通讯,摒弃了传统的 IO
本套MATLAB代码基于鲁棒优化理论,针对虚拟电厂日前经济调度场景,构建了计及源-荷双重不确定性的优化模型。代码分为三个核心版本,分别对应不同的不确定性处理范围,旨在通过精准的数学建模与约束求解,实现虚拟电厂在光伏出力波动、负荷需求不确定等复杂条件下的经济高效调度。MATLAB代码:计及源-荷双重不确定性的虚拟电厂日前鲁棒优化调度关键词:虚拟电厂/微网调度 鲁棒调度 源荷不确定性 日前经济调度。

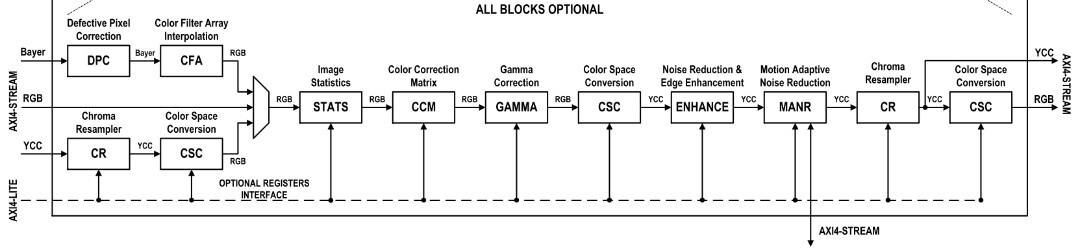
从RAW到JPG的旅程,每个环节都是算法工程师和图像信号的博弈。这些代码看着简单,但魔鬼都在细节里——比如处理边缘时的边界条件,降噪时的参数调整,白平衡的色温补偿。ISP 算法源码:Bayer、坏像素矫正、颜色插值、噪声去除、边缘增强、白平衡、 色彩矫正、gamma 校正、色彩空间转换等。ISP 算法源码:Bayer、坏像素矫正、颜色插值、噪声去除、边缘增强、白平衡、 色彩矫正、gamma 校正、
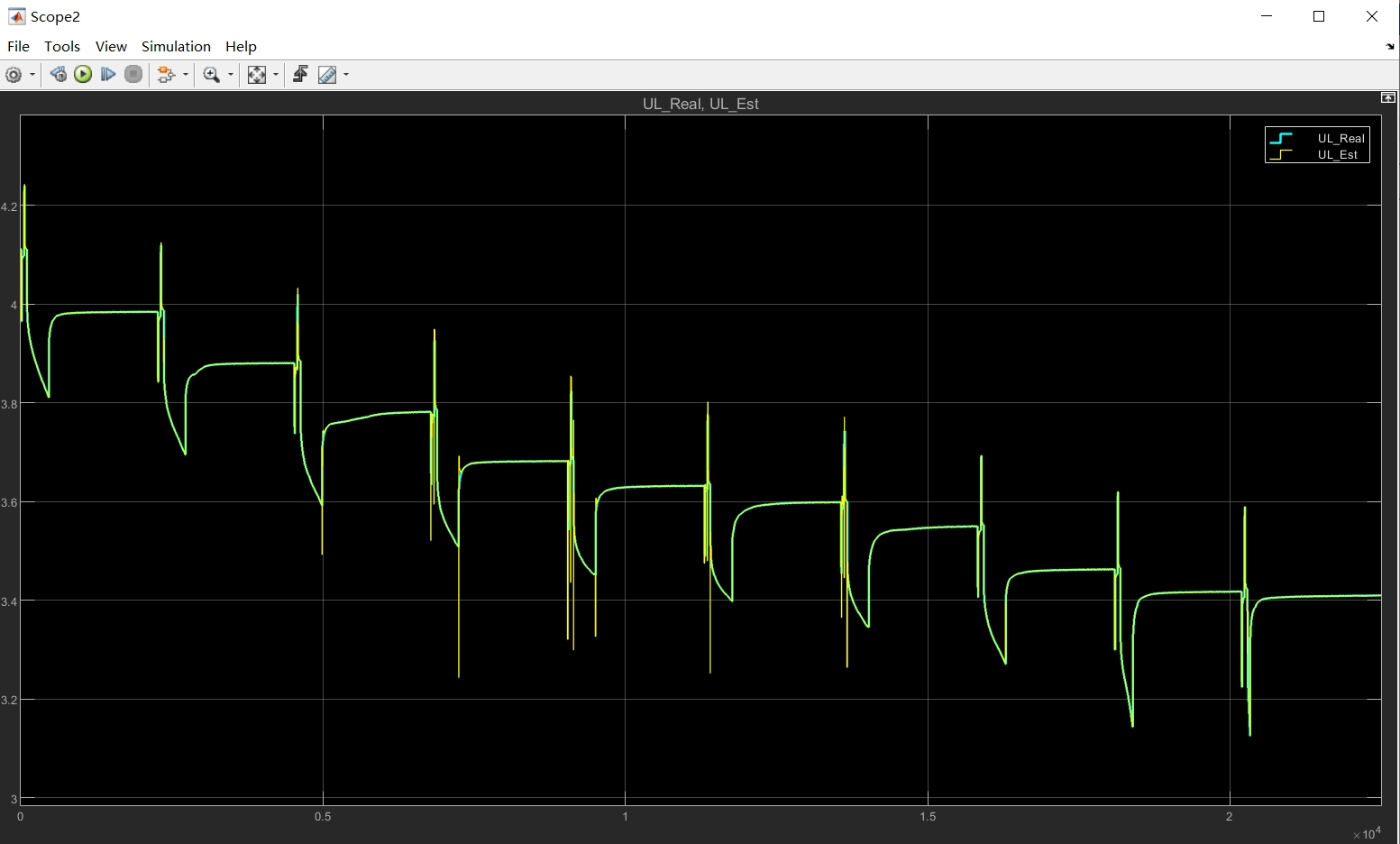
我们用二阶RC等效电路模型来模拟锂电池动态特性,这模型好比给电池做了个CT扫描——端电压表达式Vt = OCV - R0*I - V1 - V2,其中两个RC环节专门捕捉极化效应。重点来了——EKF实现。这时候状态协方差的动态调整策略就成了救命稻草——我们给SOC估计误差设置了动态阈值,超过3%就触发协方差重置,实测能把失控的估计值拽回正轨。脚本文件可以仿真在BBDST(北京公交车动态街道测试)工
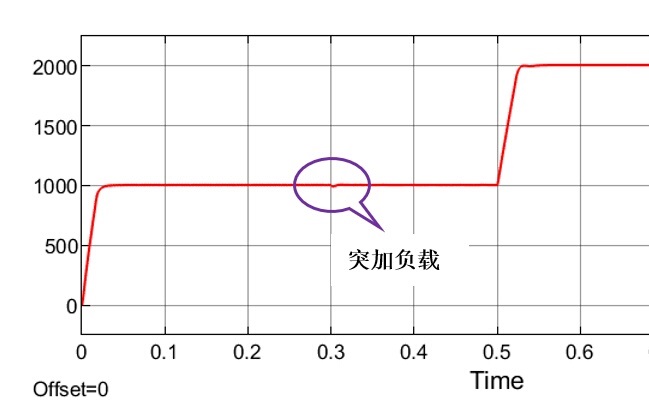
本技术说明书针对基于积分型滑模控制器(SMC)的永磁同步电机(PMSM)磁场定向控制(FOC)Simulink模型展开深度分析。该系统以永磁同步电机为控制对象,采用磁场定向控制技术构建电流环控制架构,创新性地在转速环引入积分型滑模面与指数趋近律,有效解决传统PID控制在参数摄动、负载突变场景下鲁棒性不足的问题,同时通过空间矢量脉宽调制(SVPWM)实现电机定子电压的精准调节,最终达成电机转速的高性