登录社区云,与社区用户共同成长
邀请您加入社区
三菱FX5U的以太网通讯算是工业自动化里挺常见的需求,最近刚用C#撸了个驱动库,直接上干货。这玩意儿底层走的是MC协议的三帧格式,别慌,代码里已经封装好了,咱们重点看怎么用。源码里特别处理了不同寄存器的地址映射,比如M寄存器实际对应的是0x90类型码,S寄存器是0x98。这里端口号6000是MC协议默认端口,实际用的时候记得在GX Works3里把PLC的通讯参数打开。C#与三菱FX5U以态网通讯
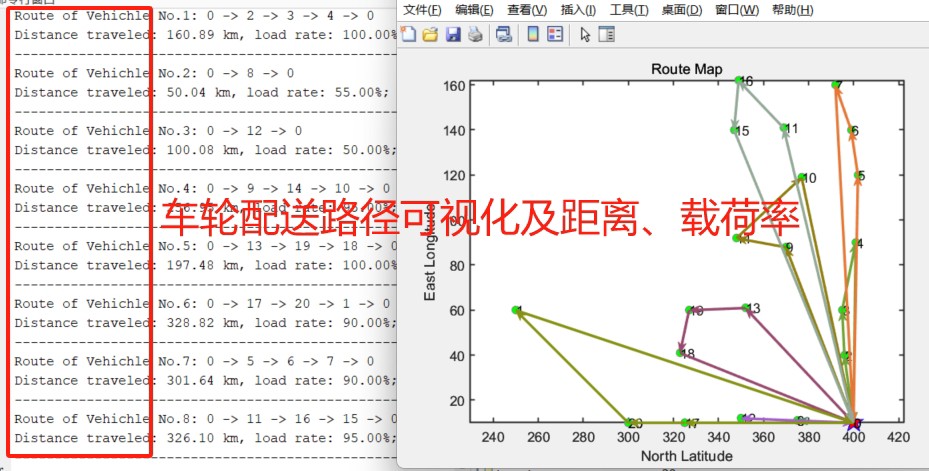
为了对这三种规划类型进行优化,它借助了好几种厉害的算法,像遗传优化算法(GA)、蚁群优化算法(ACO)、混合粒子群优化算法(HPSO)、模拟退火算法(SA)。并借助遗传优化算法(GA)、蚁群优化算法(ACO)、混合粒子群优化算法(HPSO)、模拟退火算法(SA)对三种规划类型优化,输出车辆配送路径规划结果。并借助遗传优化算法(GA)、蚁群优化算法(ACO)、混合粒子群优化算法(HPSO)、模拟退火
利用matlab和simulink搭建的纯跟踪控制器用于单移线轨迹跟踪,效果如图。版本各为2018b和2019内容包含:1、simulink模型2、纯跟踪算法的纯matlab代码,便于理解纯跟踪算法以及如何从代码到simulink模型的搭建。3、帮助文档最近在研究车辆轨迹跟踪相关的内容,利用Matlab 2018b和Simulink 2019实现了基于纯跟踪算法的单移线轨迹跟踪,效果还挺不错,给大
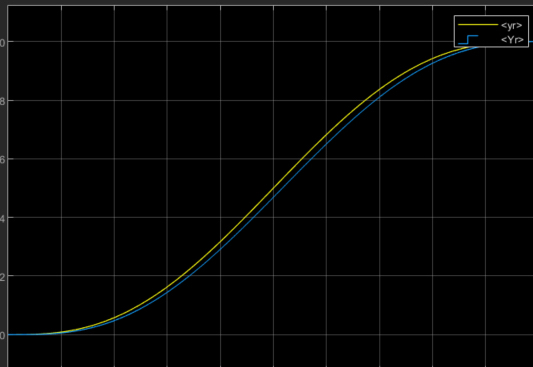
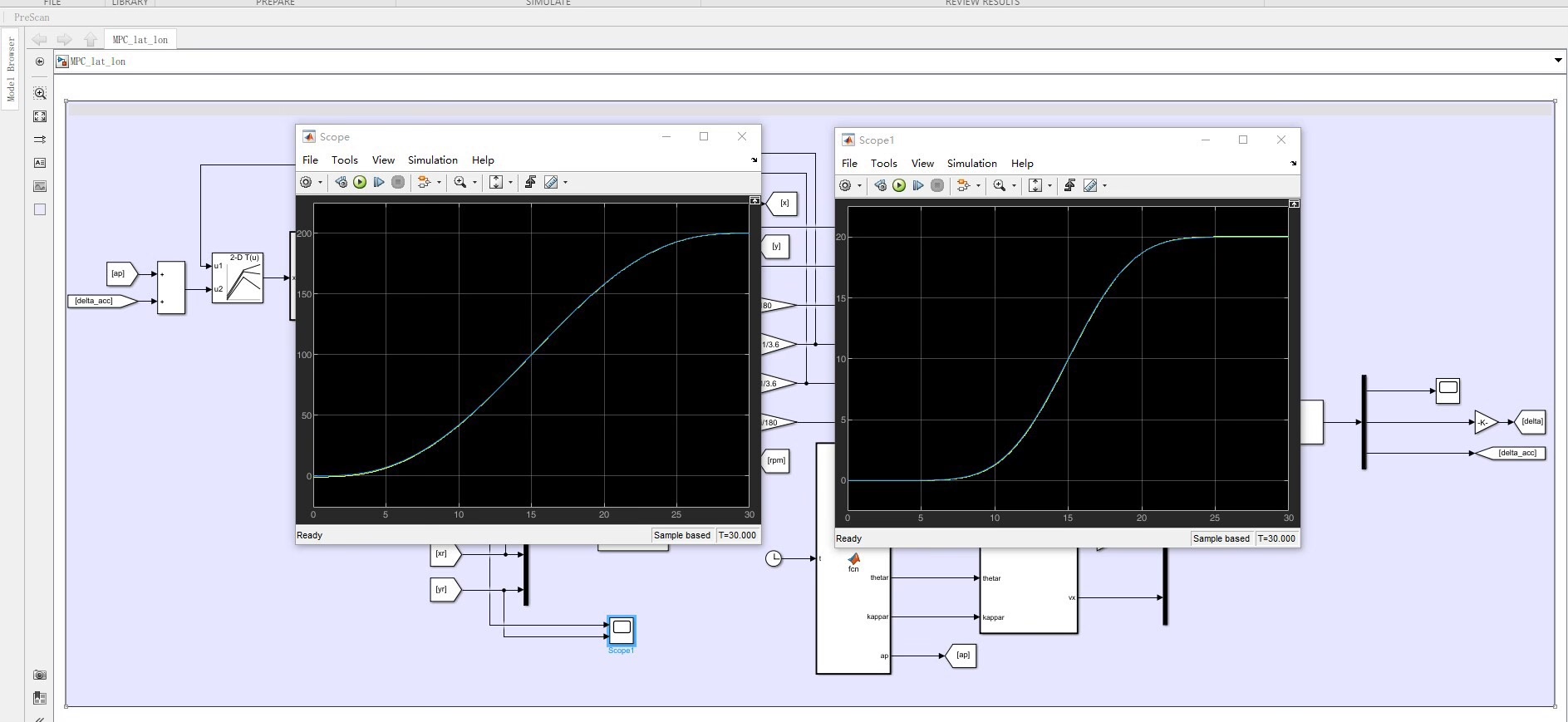
自动驾驶横纵向耦合控制-复现Apollo横纵向控制基于动力学误差模型,使用mpc算法,一个控制器同时控制横向和纵向,实现横纵向耦合控制matlab与simulink联合仿真,纵向控制已经做好油门刹车标定表,跟踪五次多项式换道轨迹,效果完美。内含三套代码,两套采用面向对象编程-一套只对控制量添加约束,一套对控制量和控制增量均添加约束,另外一套采用面向过程编程。在自动驾驶领域,横纵向耦合控制一直是个关
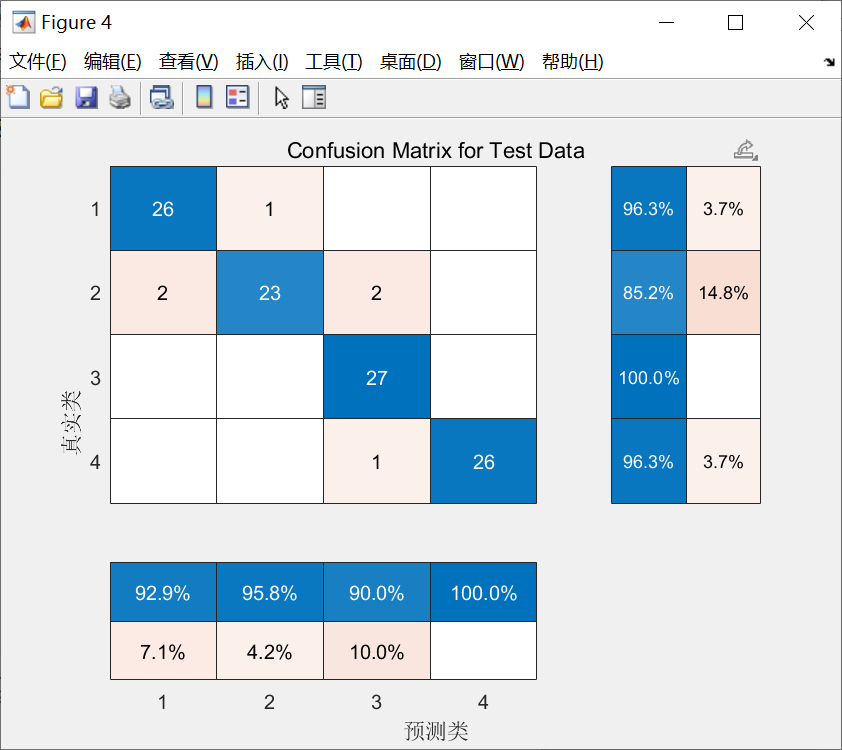
dbnunfoldtonn这一步是把预训练好的RBM堆展开成全连接网络,提取的特征相当于数据的高阶表示。最近在折腾数据分类的活,发现深度学习和传统机器学习组合拳的效果挺有意思。这个方案的核心思路是用DBN搞特征提取,再用SVM做分类决策,比单一模型多了点层次感。关键是把DBN当特征蒸馏器用,比直接用原始数据喂SVM多了抽象能力,又比纯深度学习方案省算力。当然具体效果还得看数据特性,类别太复杂时可能
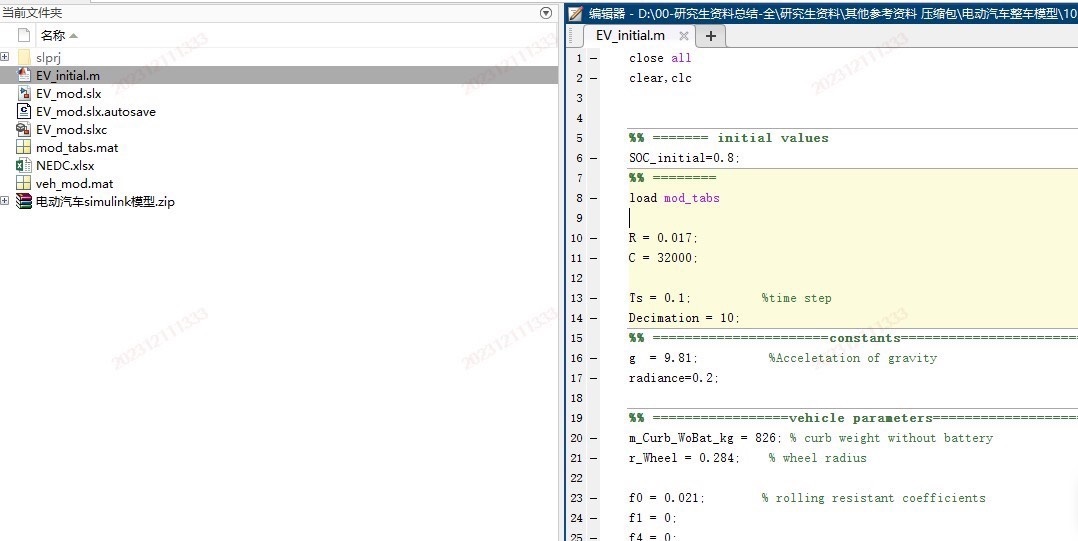
需要注意的是,参数的选择和模型的精度都会直接影响仿真的结果,因此在实际应用中,需要通过实验和测试来校准和验证模型的准确性。通过这些模型的整合,我们可以得到一个完整的整车仿真模型。Matlab/Simulink里有不同的电池模型可以选择,比如简单充放电模型,或者更复杂的电化学模型。纯电动汽车整车Matlab/simulink仿真模型(电机模型、电池模型、变速器模型、驾驶员模型、整车动力学模型)纯电动
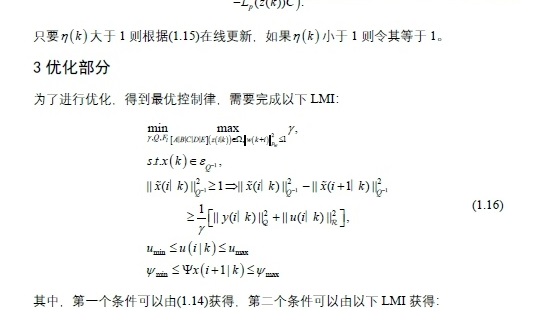
总的来说,这套的控制算法在高速行驶的路径跟踪中表现非常出色。它不仅能够适应车速的变化,还能保证车辆的稳定性。如果你对车辆控制感兴趣,不妨试试这套算法,自己调试一下不同工况下的表现。线性参变(LPV)+输出反馈鲁棒模型预测控制(OFRMPC)+路径跟踪(PTC),目前能实现20-25m/s的变速单移线,更多工况可自行调试。考虑速度和侧偏刚度变化,以及质心侧偏角的鲁棒估计,基于二自由度模型和LMI设计
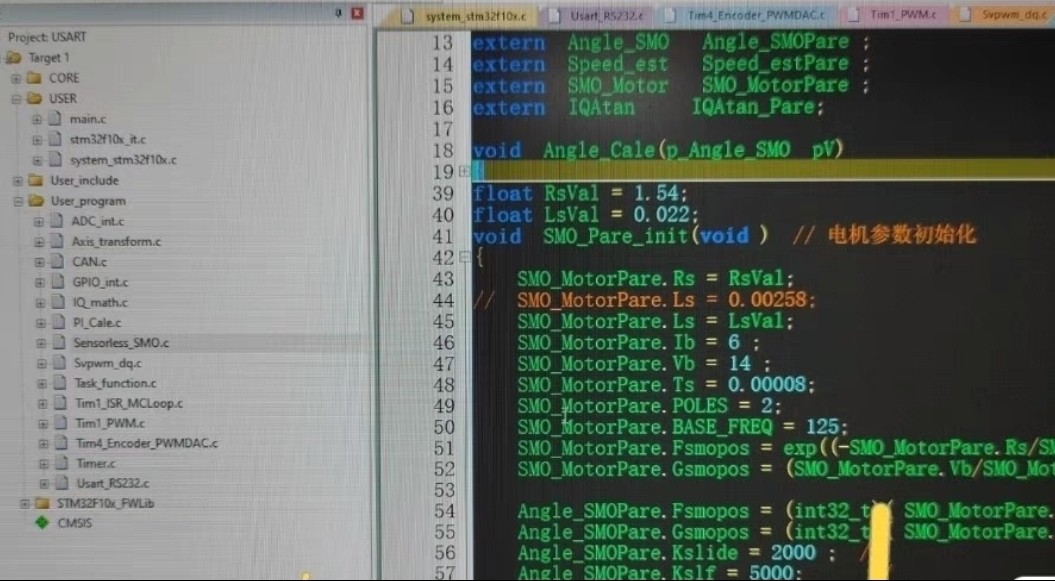
无感FOC 滑膜观测器算法采用滑膜观测器,启动采用Vf,全开源c代码,全开源,启动顺滑,提供原理图、smo推导过程及仿真模型。最近在研究电机控制领域的无感FOC(Field - Oriented Control,磁场定向控制)技术,发现其中的滑膜观测器(Sliding Mode Observer,SMO)算法很有意思,今天就来和大家分享一下。
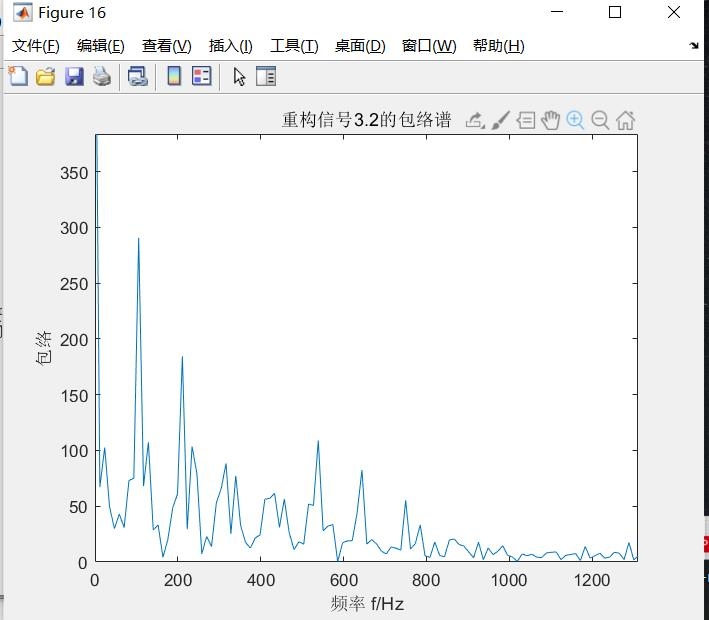
实战中注意小波基选择——轴承故障用db10,语音信号用sym8,别照搬参数。碰到非平稳信号,试试自适应小波包分解,虽然MATLAB里得自己写循环实现。先搞个仿真信号热热身:3秒时长,采样率1024Hz,弄个10Hz+50Hz的正弦波叠加,再加点高斯噪声提神。频谱图别老用FFT,小波系数能量分布更直观。小波分解用db4小波基最顺手,分解层数别瞎猜,用。小波变换,小波包变换 matlab程序。小波变换
swift5.6.3
——swift5.6.3
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI Agent技术社区
AI Agent技术社区


 快递鸟社区
快递鸟社区
 AtomGit开源社区
AtomGit开源社区

 九章云极普惠算力
九章云极普惠算力
 魔乐社区
魔乐社区