- @veFuwcCVSXz
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
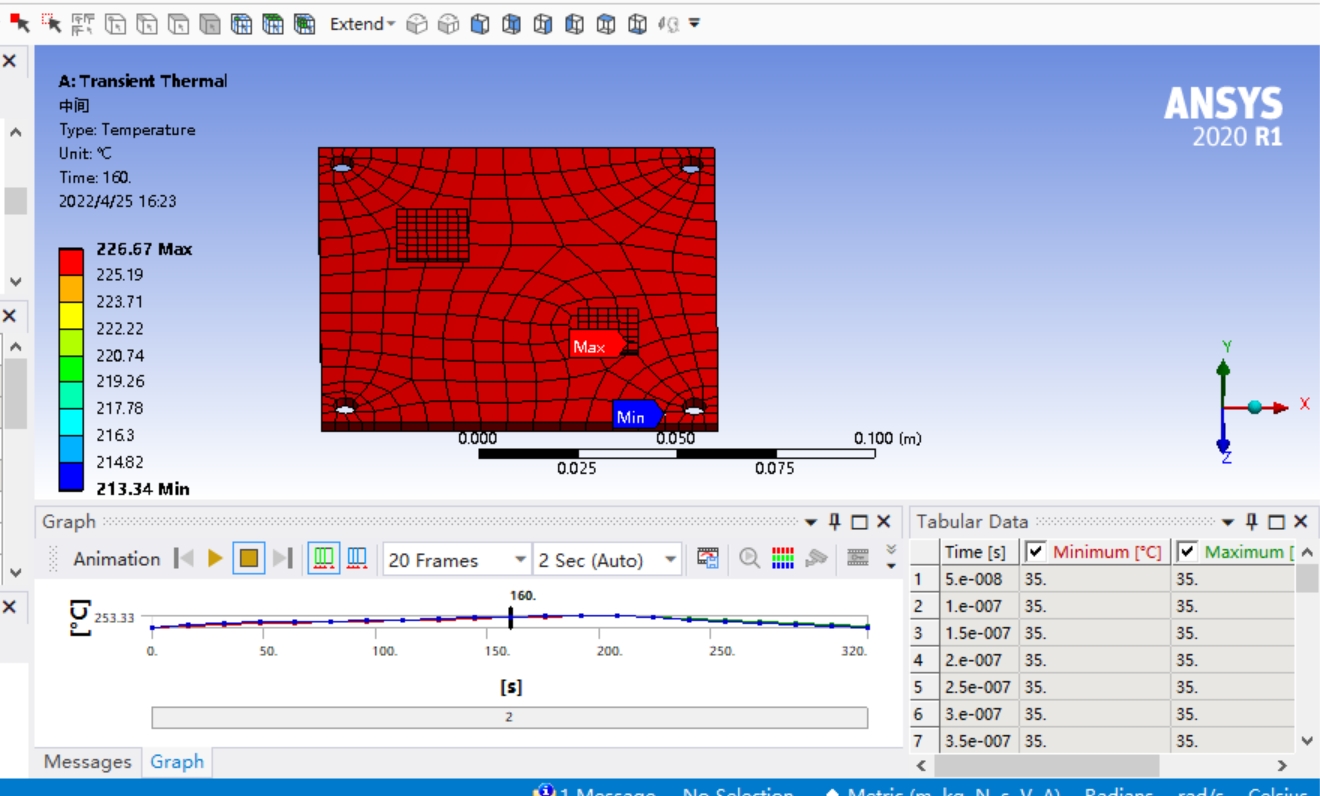
为此,团队以 ANSYS Workbench 为底座,自研一套“回流焊-温度循环”全自动热力耦合框架(以下简称本框架)。该框架通过模板化工程数据、脚本化流程驱动、参数化模型与耦合场数据自动传递,实现从炉温曲线到焊点疲劳寿命的一键式评估,显著缩短迭代周期(由 3-4 周降至 2-3 天)。本框架将“回流焊-温度循环”两大可靠性工况纳入同一数据链路,通过模板化、脚本化、参数化的设计,把繁琐的手工操作压
把库卡给的GSDML-V2.3-KUKA-PN-20190312.xml扔进去,这时候设备目录里就能看到KUKA机器人选项了。用Wireshark抓包发现PLC疯狂发诊断请求,最后在机器人配置里把Profinet看门狗时间从默认2s改成5s,世界安静了。库卡机器人与西门子PLC通讯案例中文版,有配置资料,库文件可以拿来直接用,也可以参考借鉴学习研究,送相关手册资料。库卡机器人与西门子PLC通讯案例

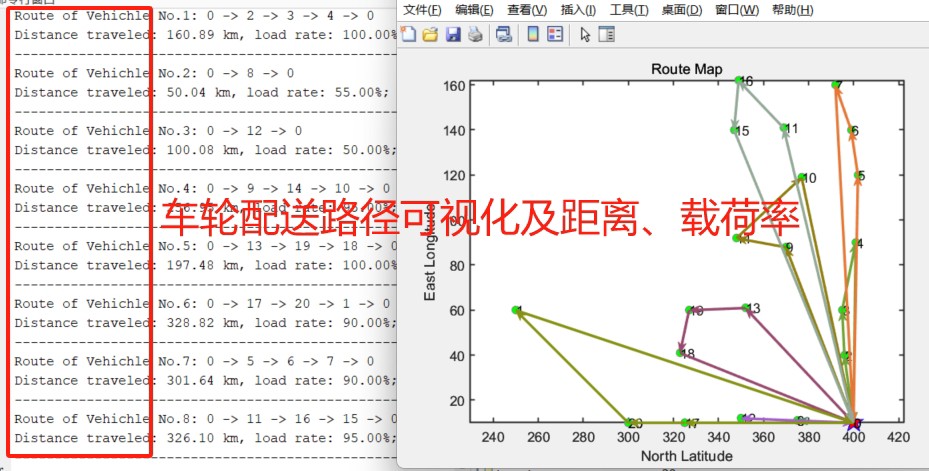
为了对这三种规划类型进行优化,它借助了好几种厉害的算法,像遗传优化算法(GA)、蚁群优化算法(ACO)、混合粒子群优化算法(HPSO)、模拟退火算法(SA)。并借助遗传优化算法(GA)、蚁群优化算法(ACO)、混合粒子群优化算法(HPSO)、模拟退火算法(SA)对三种规划类型优化,输出车辆配送路径规划结果。并借助遗传优化算法(GA)、蚁群优化算法(ACO)、混合粒子群优化算法(HPSO)、模拟退火
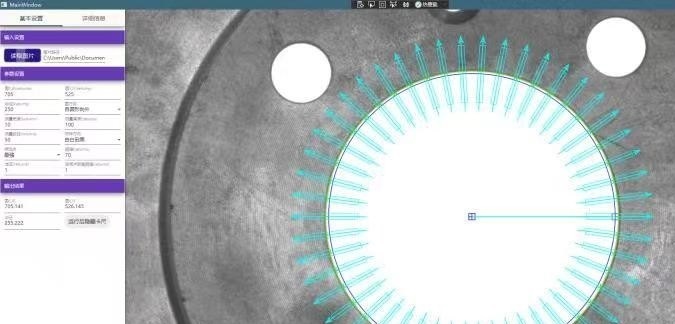
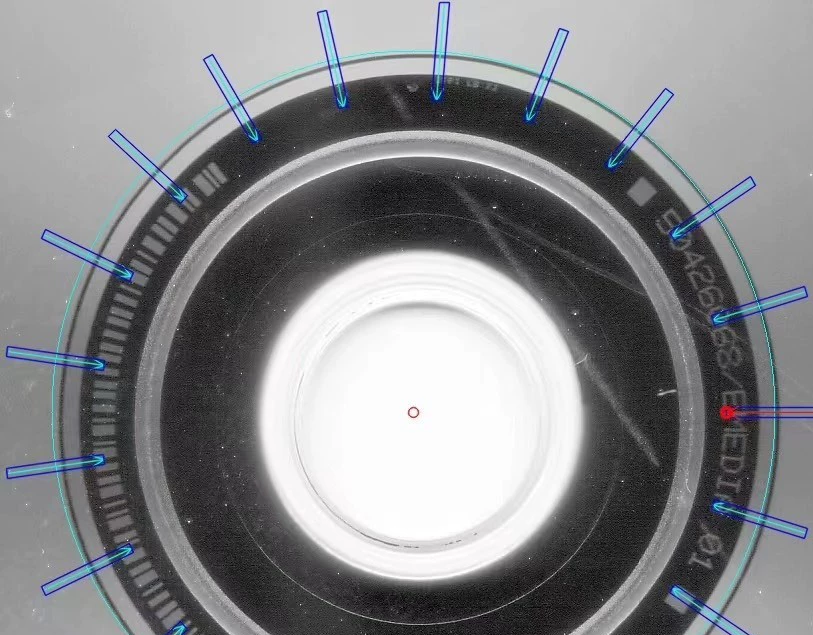
本项目是一款结合OpenCV计算机视觉库与WPF(Windows Presentation Foundation)桌面应用框架开发的卡尺找圆工具。核心目标是通过自定义卡尺算法(基于OpenCvSharp实现),从输入图像中精准提取圆形目标的边缘特征,经噪声过滤与圆拟合计算,最终输出圆形的中心坐标、半径等关键参数。项目适用于工业检测、图像测量等场景,支持参数可视化配置与结果实时展示,兼具功能性与易用
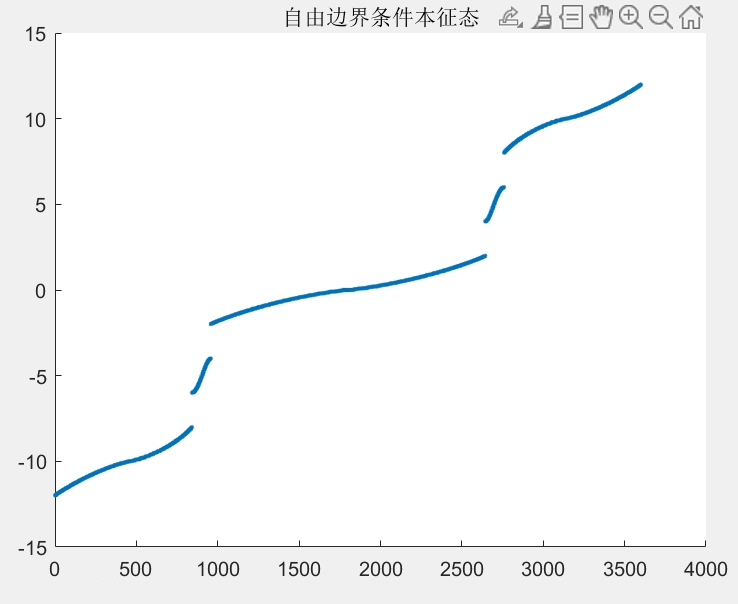
这里本征值分布会呈现明显的能隙,而靠近零能的态对应边缘态。用scatter画出的本征值图里,如果看到能隙中有孤立点,那就是拓扑保护的边界态在招手。5.x方向,y方向均自由边界条件的边界态态场分布。5.x方向,y方向均自由边界条件的边界态态场分布。6.x方向,y方向均自由边界条件的本征值分布。6.x方向,y方向均自由边界条件的本征值分布。x方向,y方向均自由边界条件的体态场分布。x方向,y方向均自由
别嫌这里只放了一小段,包里是真·全乎——从OpenCV 4.x的VS2019/VS2022配置文档(不管你是静态库还是动态库,x86/x64,Debug/Release分的清清楚楚,复制粘贴属性表路径就行),到完整的径向卡尺类定义、边缘拟合(RANSAC+最小二乘,默认开RANSAC滤掉毛刺边缘的子卡数据)、悬浮数值标签、保存图片结果,连个测试用的三个不同模糊程度的垫片图片都塞进去了。基于c++的
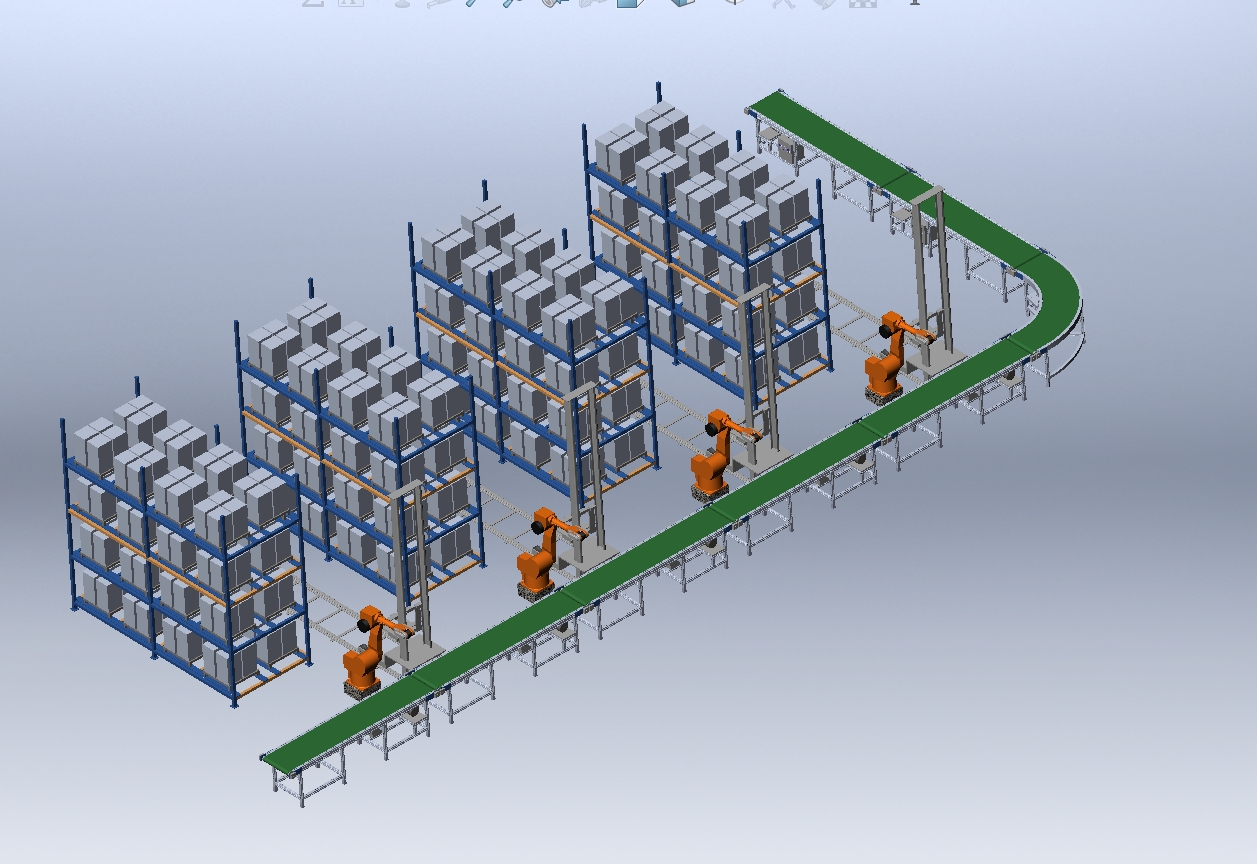
双击01号装配体,堆垛机的升降架结构瞬间撑满屏幕——这货的X型剪叉机构有点意思,导轨槽里藏着六个等距分布的滚轮组。虽然注释里写着"振动超标,已弃用",但这种非常规设计拿来当毕设课题绝对能唬住导师。不过要注意模型里的气缸参数是五年前的版本,现在可能需要更新密封圈规格。sw打开,有零部件模型,有装 配体模型,有堆垛机的详细机械结构。sw打开,有零部件模型,有装 配体模型,有堆垛机的详细机械结构。可用于
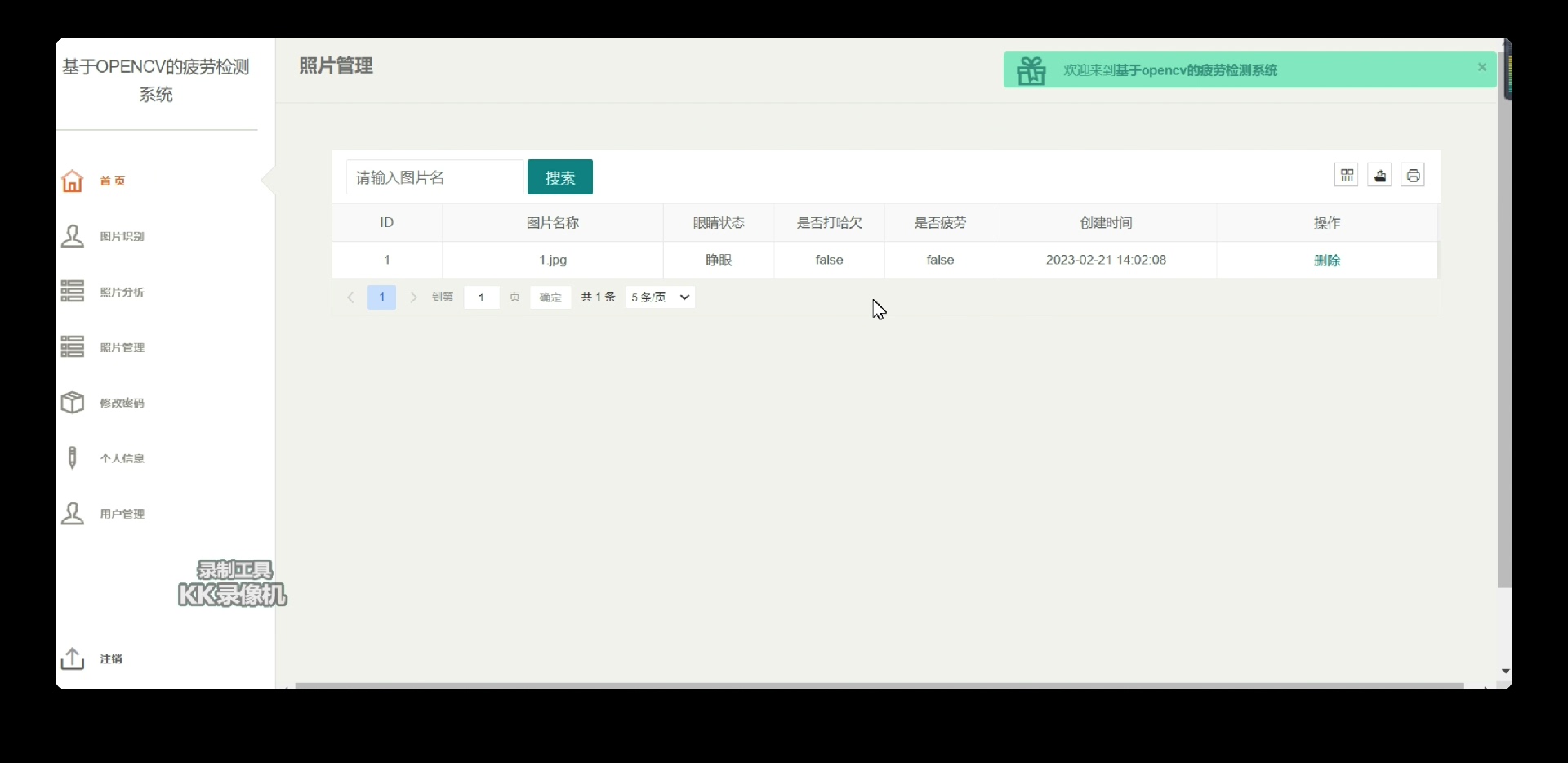
这套系统通过结合实时视频流处理、目标检测和行为识别,能够有效地监控驾驶员的危险行为,帮助提升驾驶安全性。尽管目前的实现方式还有待优化(比如在复杂光照条件下的表现不够稳定),但整体框架已经具备很强的实用价值。基于深度学习的驾驶员分心驾驶行为(疲劳+危险行为)预警系统使用YOLOv5+Deepsort实现驾驶员的危险驾驶行为的预警监测下面是对该系统的简要介绍:1. 实时视频流获取:系统使用OpenCV
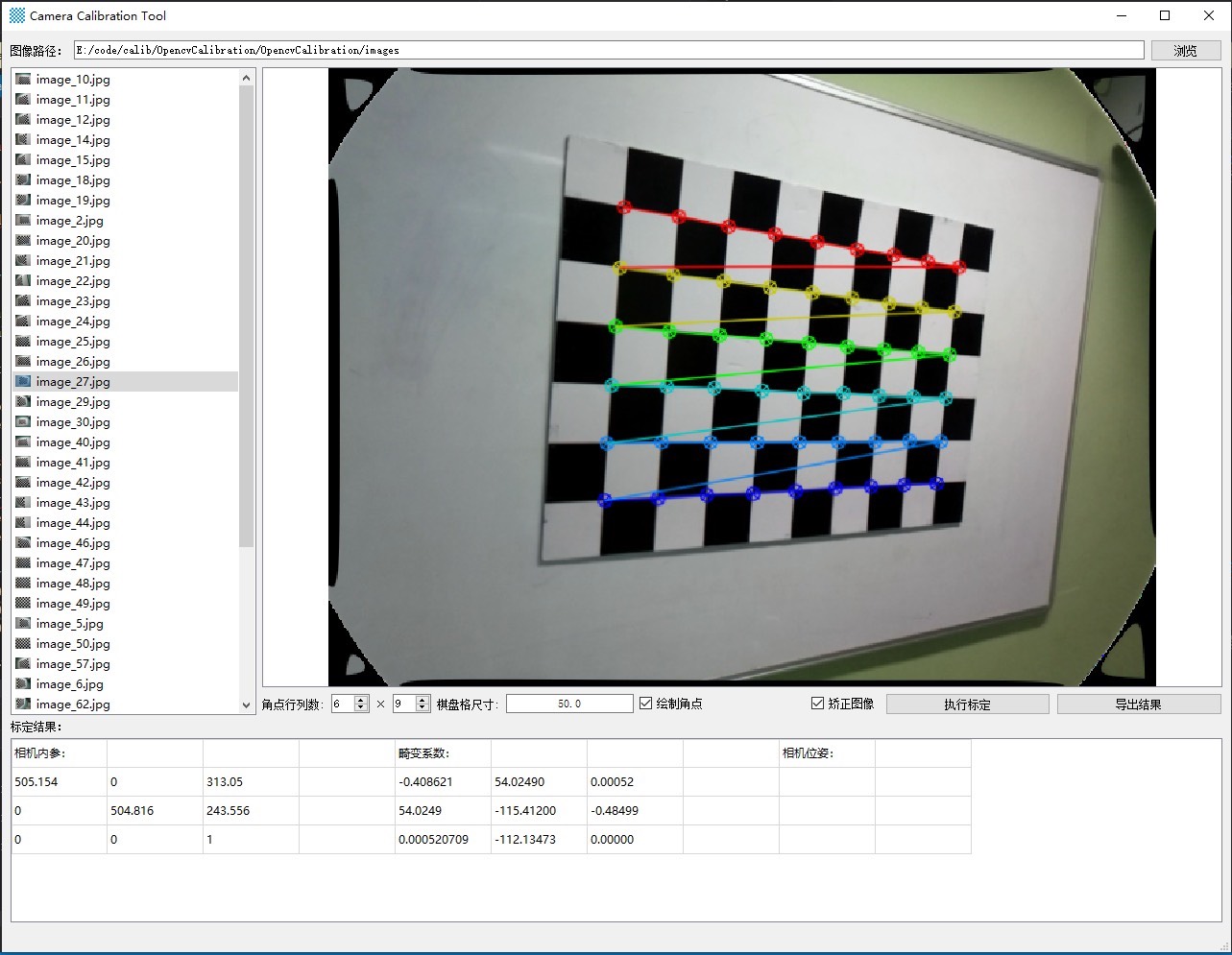
基于Opencv4.7.0开发的棋盘格标定助手资源名称:Opencv棋盘格标定助手版本信息:Visual Studio 2022、QT5.9.9主要功能:针对使用棋盘格标定板的相机内参标定。技术要求:Window10/11 x64,Opencv使用说明:导入棋盘格图像和设置相应的角点和格子尺寸就可以直接标定相机内参了,畸变系数默认使用了8个,可以在代码中自行设置,附带了结果导出。
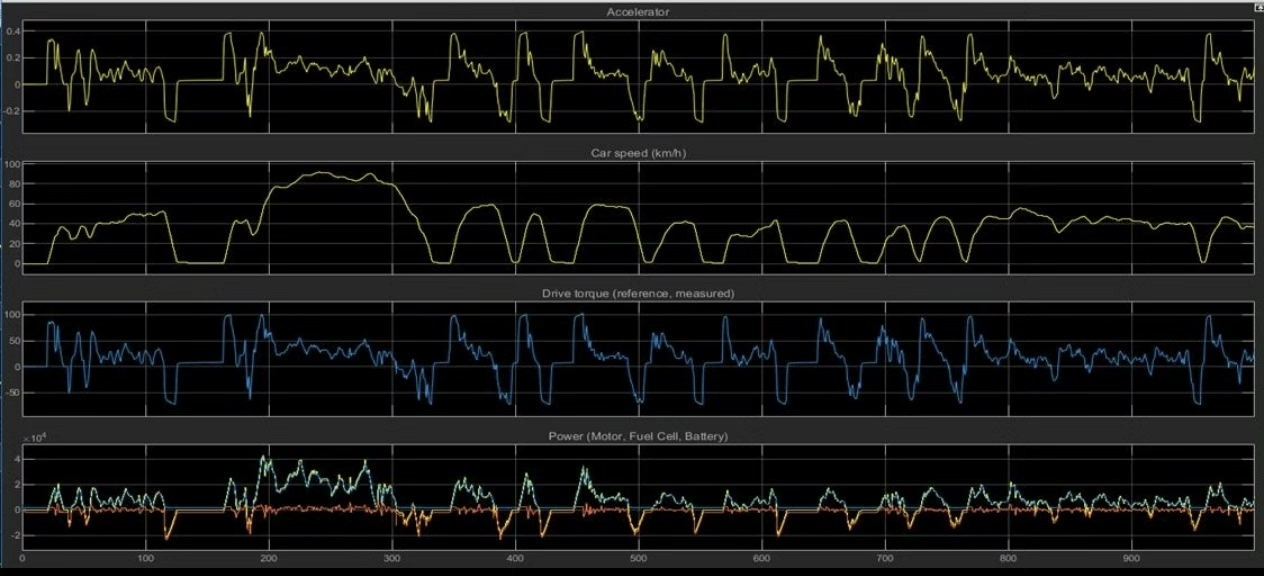
重点在于能量分配策略——就像个精明的会计,得决定什么时候让燃料电池给电池充电,什么时候让电池直接驱动电机。燃料电池汽车整车模型,simulink搭建,matlab2018以上所有版本都可运行,可做燃料电池汽车能量管理等相关设计模型可加工况附相关说明paper。燃料电池汽车整车模型,simulink搭建,matlab2018以上所有版本都可运行,可做燃料电池汽车能量管理等相关设计模型可加工况附相关说