- @WrkZmkvJ
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
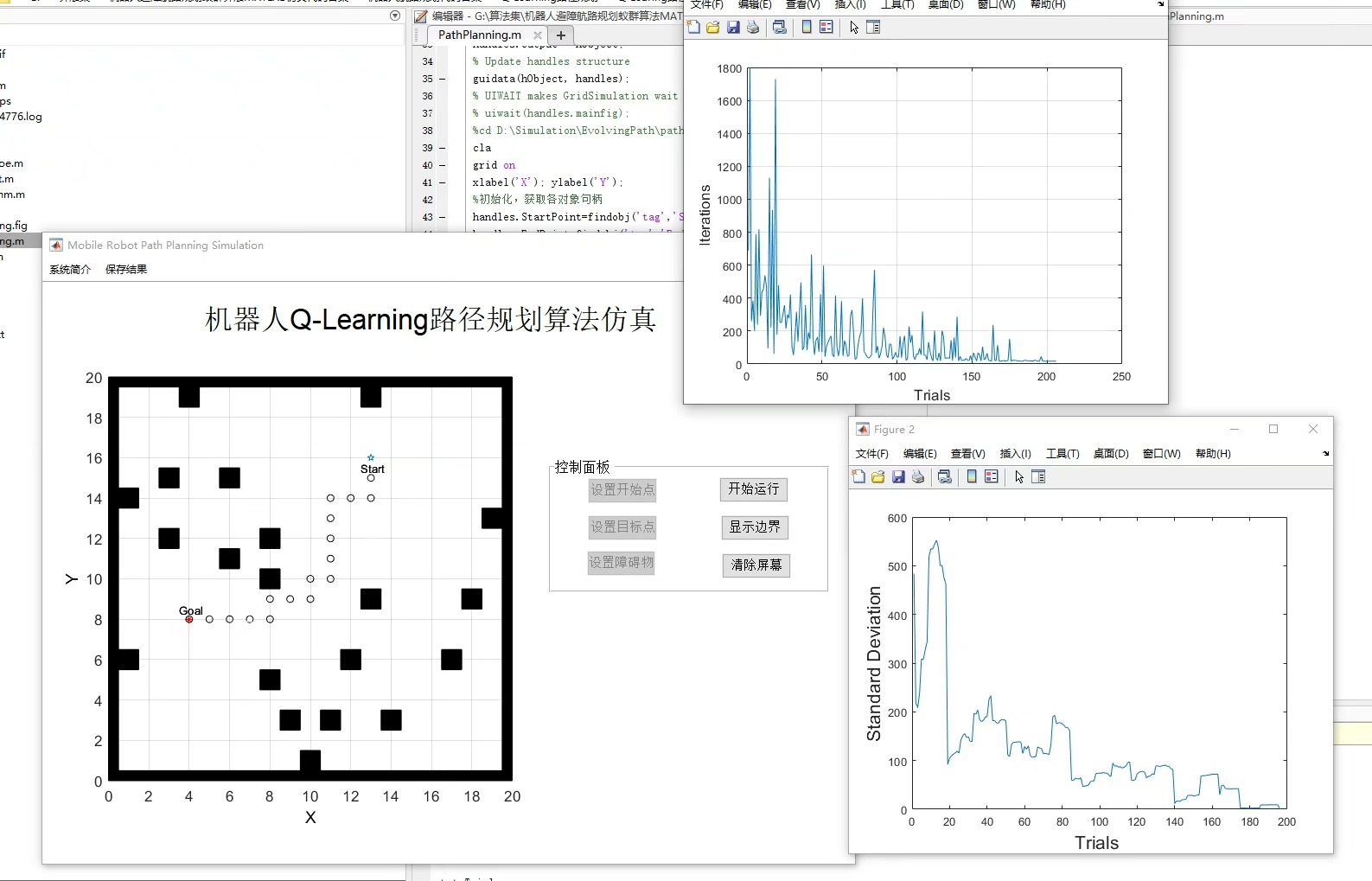
先想象一个场景:你的扫地机器人卡在沙发和茶几之间疯狂转圈,这时候它需要的不是更猛的电机,而是一个能自己规划路径的大脑。Q-learning就是帮机器人长脑子的算法之一,咱们今天不聊公式,直接撸代码看看这玩意儿怎么让机器人学会绕开障碍物。这个实现虽然简化(比如没考虑动态障碍物),但已经揭示了Q-learning的核心思想:通过试错建立环境地图,用奖励机制引导学习方向。比如在咱们的设定中,机器人可能会
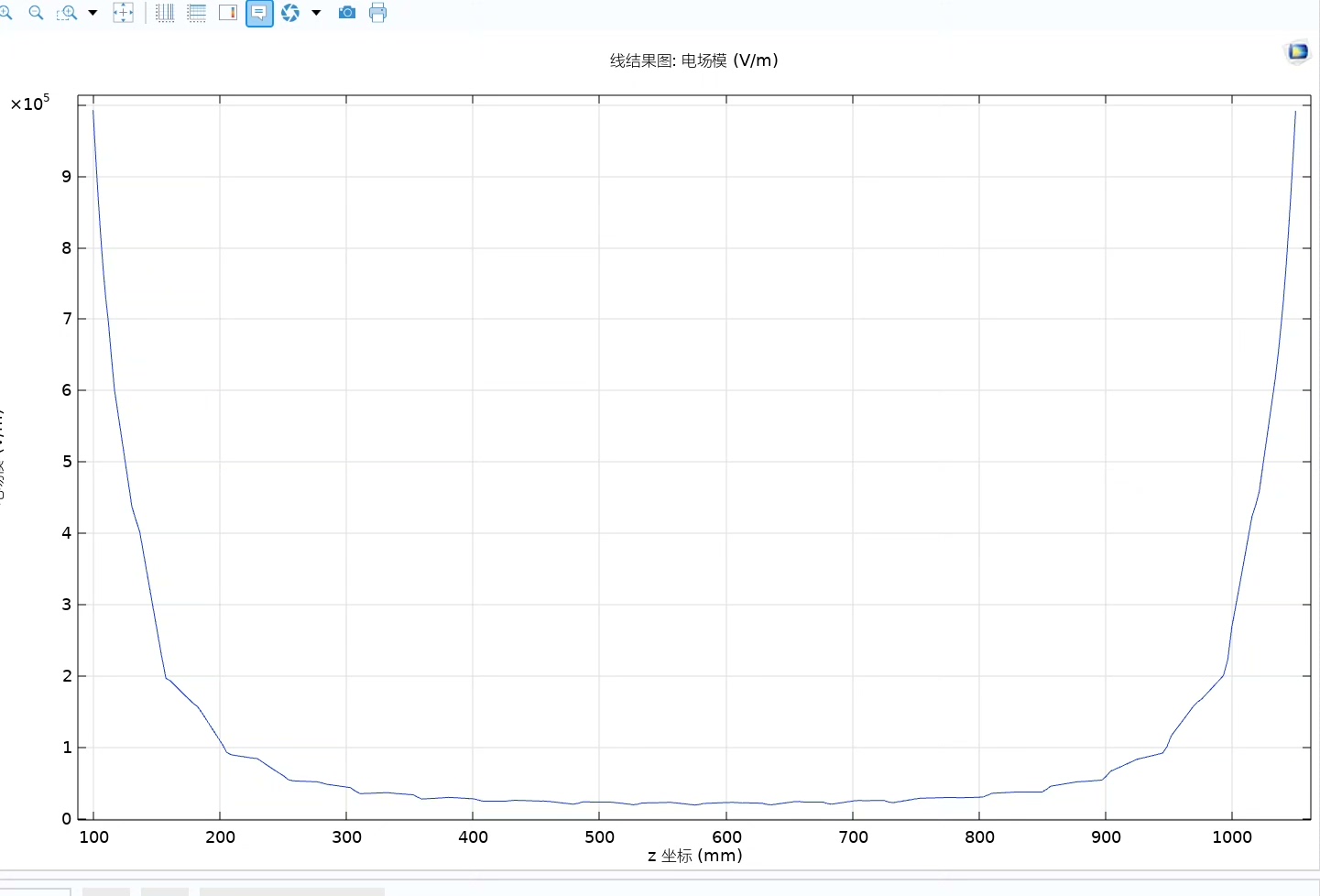
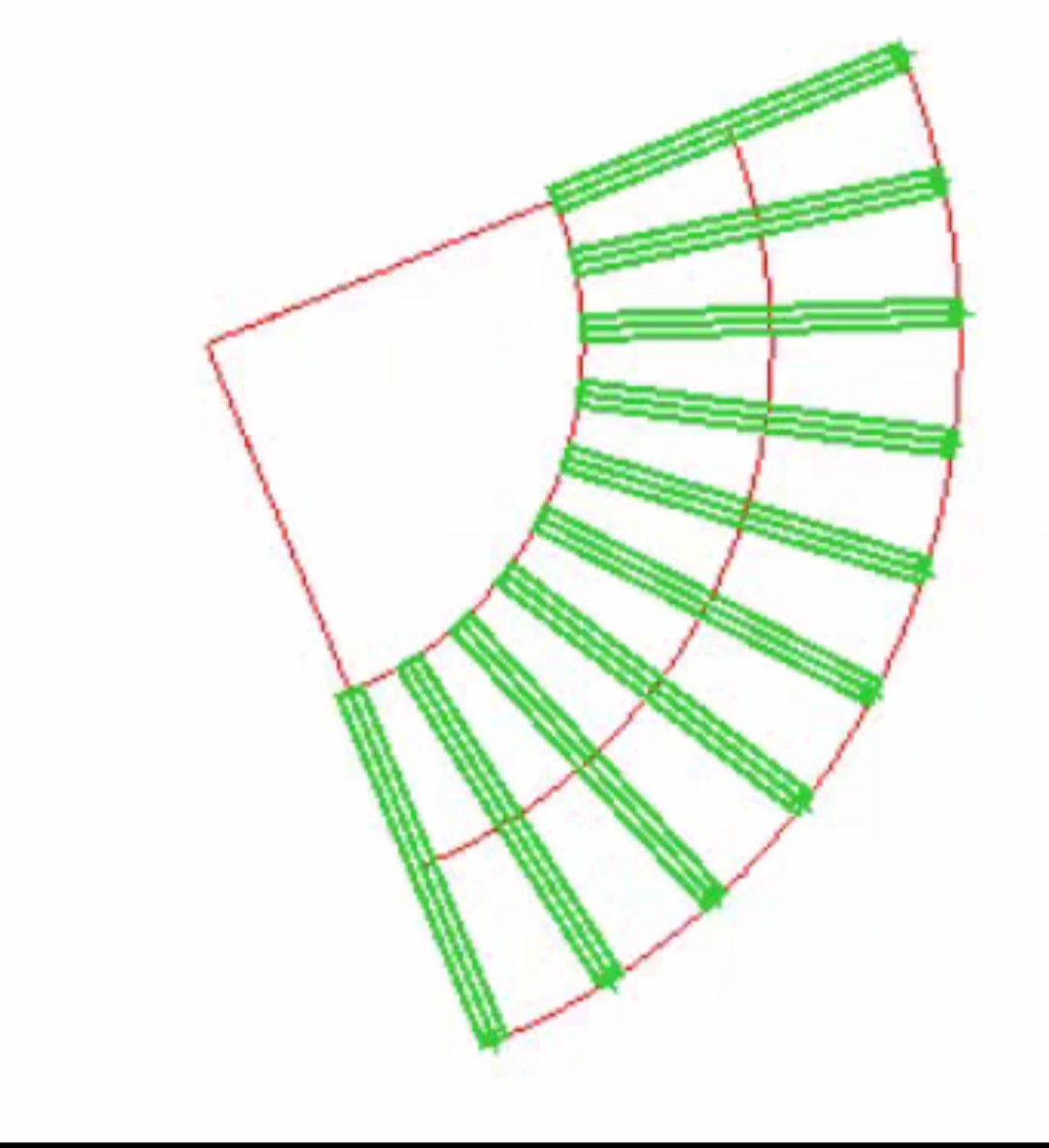
仿真结果显示,最大场强出现在第三片伞裙根部,达到9.8kV/mm,比光滑绝缘子结构降低了约42%。计算发现,这处的电场强度能达到18.7kV/mm,接近硅橡胶的击穿阈值。有意思的是旋转角参数用了π/6而不是直接写30度,毕竟COMSOL内部计算都用弧度制,这么写能避免单位转换带来的计算误差。等软件启动的间隙,突然想起上次变电站老师傅念叨的110kV复合绝缘子电场畸变问题,这次干脆用有限元法扒开它的
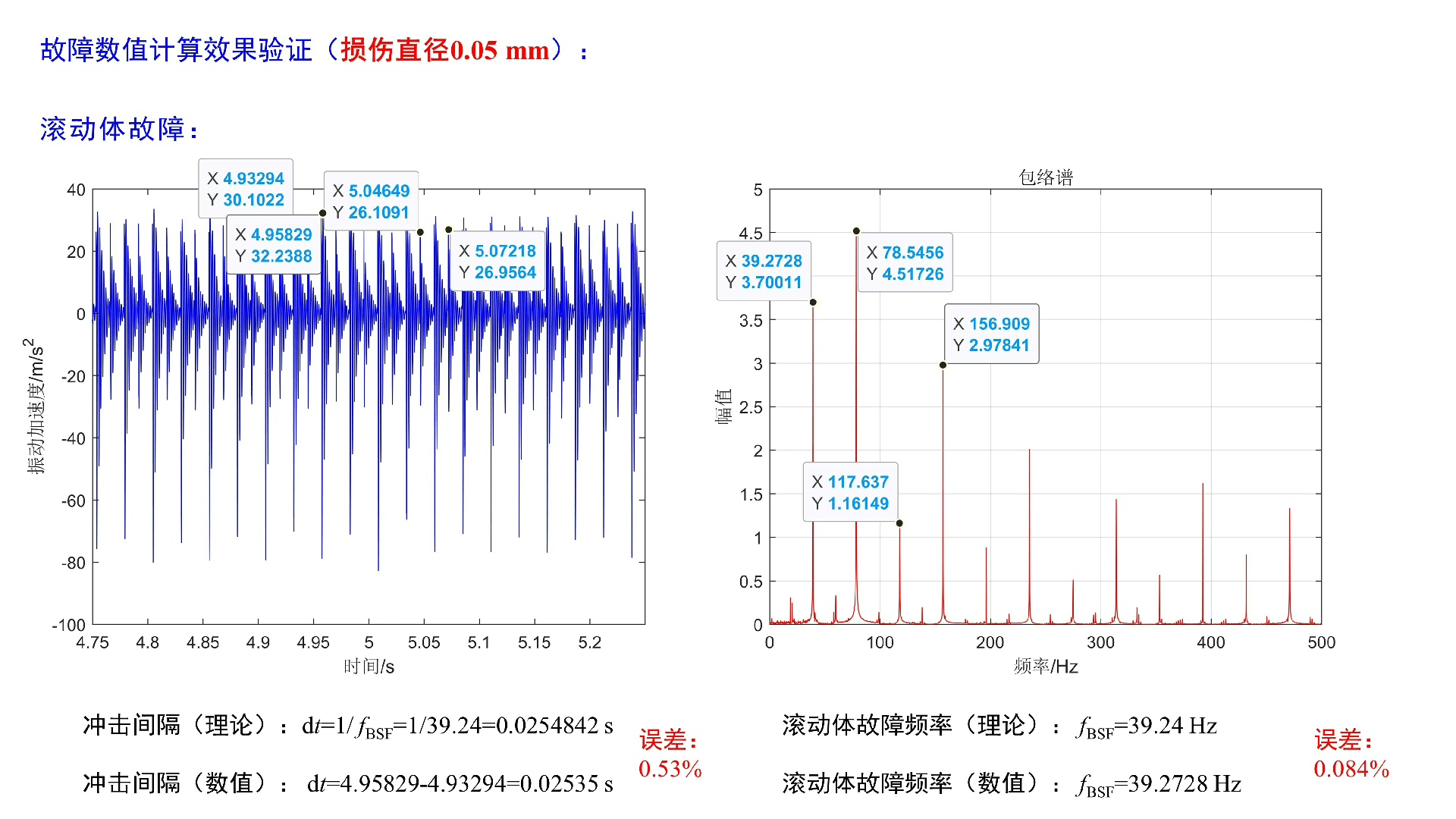
MATLAB轴承动力学代码(正常、外圈故障、内圈故障、滚动体故障),根据滚动轴承故障机理建模(含数学方程建立和公式推导)并在MATLAB中采用ODE45进行数值计算。可模拟不同轴承故障类型,输出时域波形、相图、轴心轨迹、频谱图、包络谱图、滚道接触力,根据模拟数据后续可在此基础上继续开展故障诊断和剩余寿命预测。
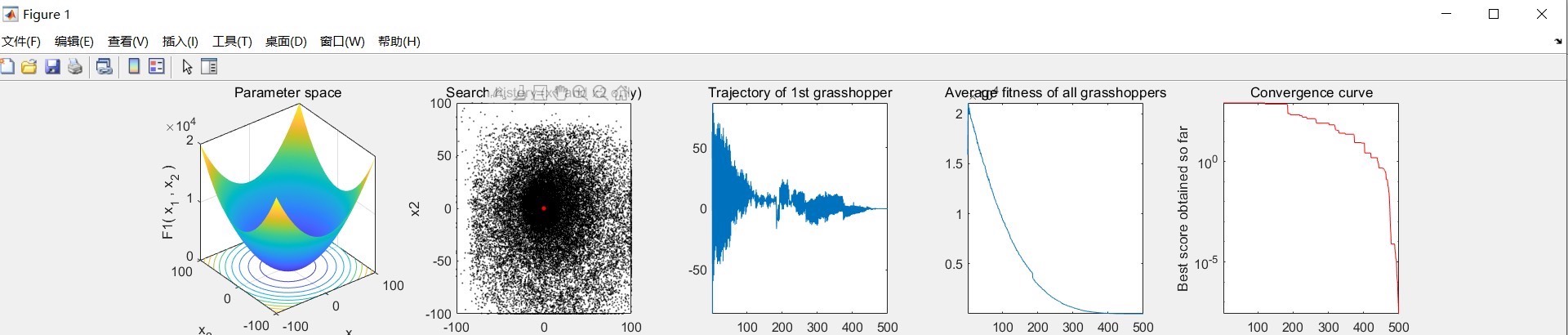
咱们今天来点硬核但好玩的——用Python把群智能优化算法的搜索过程画出来。可替换性强,每个优化算法都有增加可视化结果的前后程序对比,您对比着看,就能轻松掌握该方法,可灵活增加到你自己的优化算法上。可替换性强,每个优化算法都有增加可视化结果的前后程序对比,您对比着看,就能轻松掌握该方法,可灵活增加到你自己的优化算法上。给出了3种优化算法,北方苍鹰优化算法(NGO),灰狼优化算法(GWO),蝗虫优化
它里面还内含PLC tcpip通讯,像西门子、汇川、三菱ModbusTcp等通讯方式都支持,可以通讯触发、接发数据等。它可以调用4台海康相机dll文件,通过软硬触发获取图像,然后传入到visionprotoolblock文件进行处理显示。更厉害的是,可以随意更改海康相机型号,只需要把相机编号更改到相机绑定里即可。相机三相机四使用c#opencvsharp算法进行检测,如需更改直接复制相机一相机二代
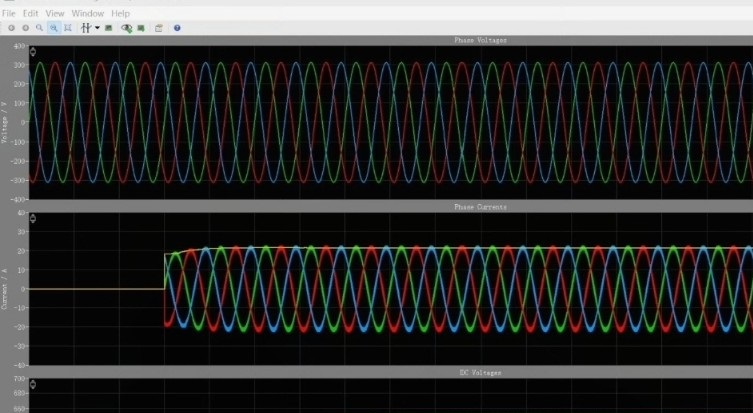
通过采用SPWM调制方式和电压电流双闭环控制方式带前馈的控制策略,本模型实现了对电力系统的有效控制和稳定输出。本文将介绍在plecs(Power Electronics Control Simulation)仿真软件中建立的三相六开关PFC模型,并详细阐述其平均电流调制方式为SPWM及电压电流双闭环控制方式带前馈的控制策略。在plecs版本8.2的仿真环境中,我们成功构建了该模型,并通过仿真得到了
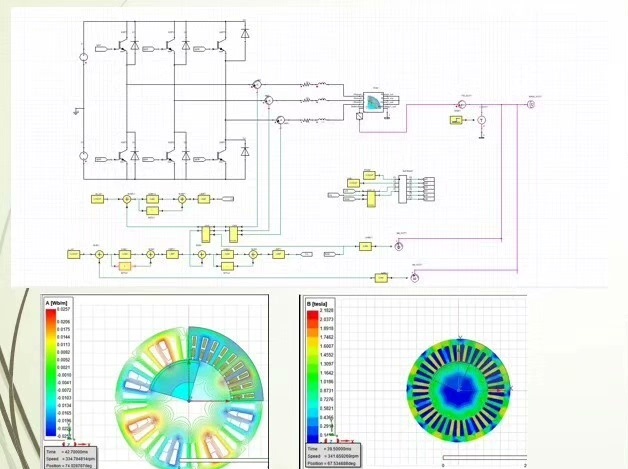
maxwell simplorer simulink 永磁同步电机矢量控制联合仿真,电机为分数槽绕组,使用pi控制SVPWM调制,修改文件路径后可使用,软件版本matlab 2017b, Maxwell electronics 2021b。maxwell simplorer simulink 永磁同步电机矢量控制联合仿真,电机为分数槽绕组,使用pi控制SVPWM调制,修改文件路径后可使用,软件版本
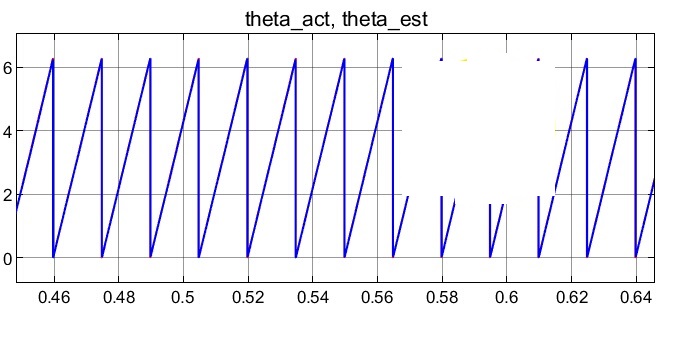
首先,龙贝格观测器的核心思想是通过电机的数学模型来估计那些我们无法直接测量的状态量。对于PMSM来说,反电势是一个关键的量,因为它包含了转子的位置和速度信息。今天就来聊聊怎么用龙贝格观测器提取电机的反电势,再通过PLL(锁相环)获取转子的位置和速度信息。有了反电势的估计值,接下来就是通过PLL来提取转子的位置和速度。PLL的基本原理是通过调整一个振荡器的频率,使得它的输出与输入信号同步。在PMSM
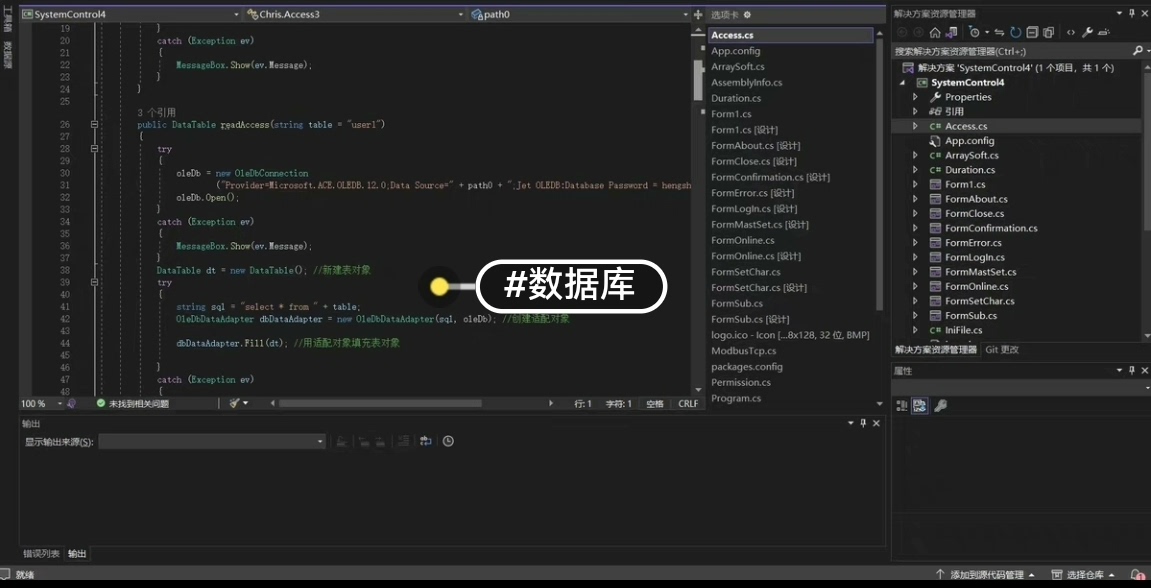
本文深入剖析一套基于 C# 与 OpenCvSharp 构建的工业级机器视觉系统。该系统面向高精度定位、缺陷检测与模板匹配等典型工业应用场景,采用模块化、可配置化的设计理念,支持 Basler 等主流工业相机接入,并具备完整的配方管理、参数序列化、图像处理工具链及结果可视化能力。整体架构清晰,职责分明,适用于自动化产线中的视觉引导、质量检测与过程控制。该视觉系统是一个功能完备、架构清晰、扩展性强的
48多源动态最优潮流分布式鲁棒优化关键词:分布式鲁棒优化 风光不确定性 最优潮流 Wasserstein距离仿真软件:matlab+yalmip+cplex参考文档:《多源动态最优潮流的分布鲁棒优化方法》主要内容:针对大规模清洁能源接入电网引起的系统鲁棒性和经济性协调问题,提出含风–光–水–火多种能源的分布鲁棒动态最优潮流模型采用分布鲁棒优化方法将风光不确定性描述为包含概率分布信息的模糊不确定集。