- @2508_94224053
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
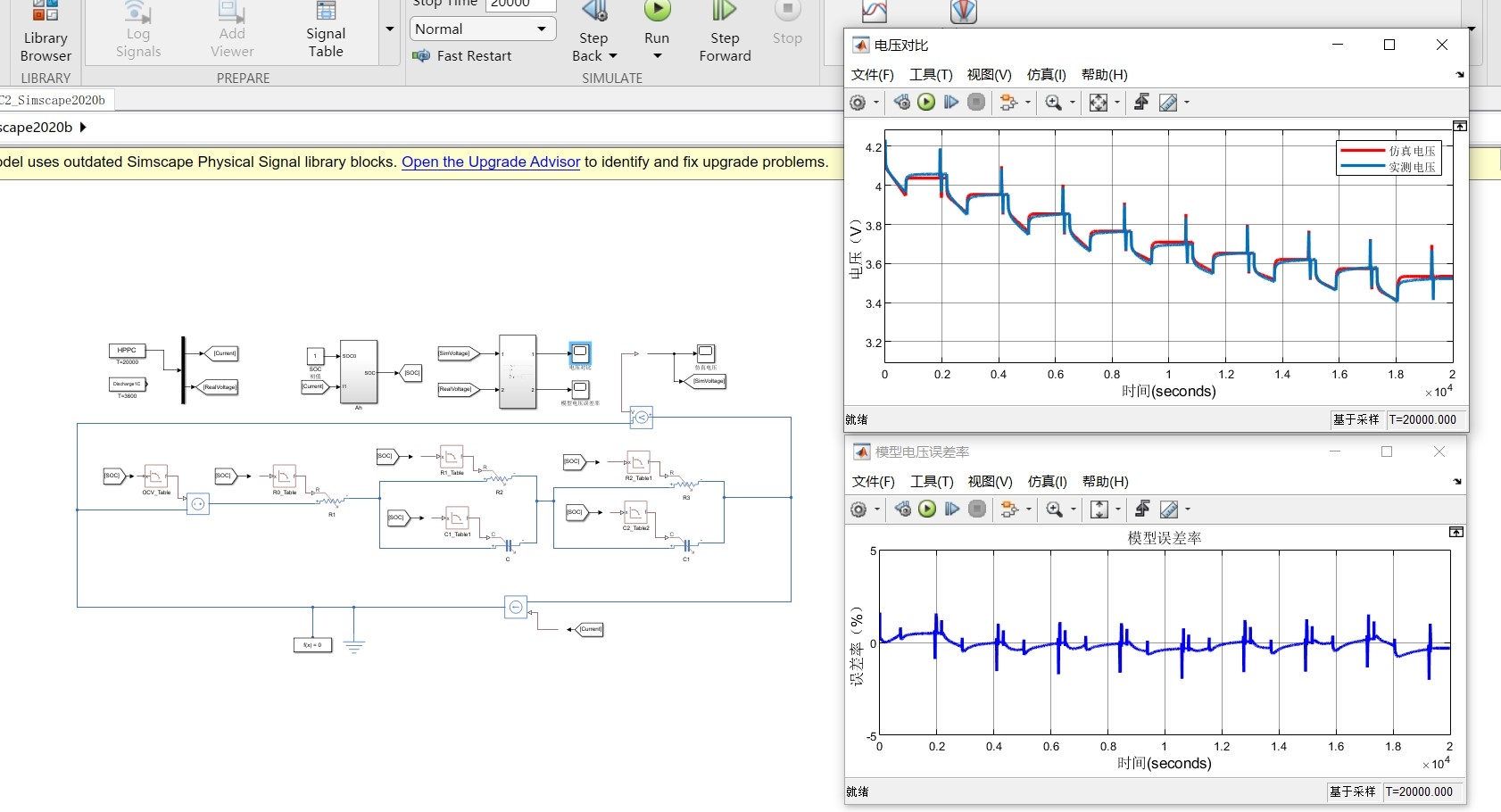
这段代码有几个骚操作值得注意:SOC计算直接把电流对时间积分(真实项目里要加库仑效率补偿),Vocv-SOC关系用了个线性近似(实际得用查表法)。状态方程求解用的是欧拉法,虽然精度差点但计算量小,实时仿真时特别香。锂电池仿真领域的老司机都明白,等效电路模型这玩意儿就像打游戏的作弊器——不用它也能玩,但用了效率直接翻倍。今天咱们不整那些虚头巴脑的理论推导,直接上手拆解最常见的RC等效模型,顺便用Py
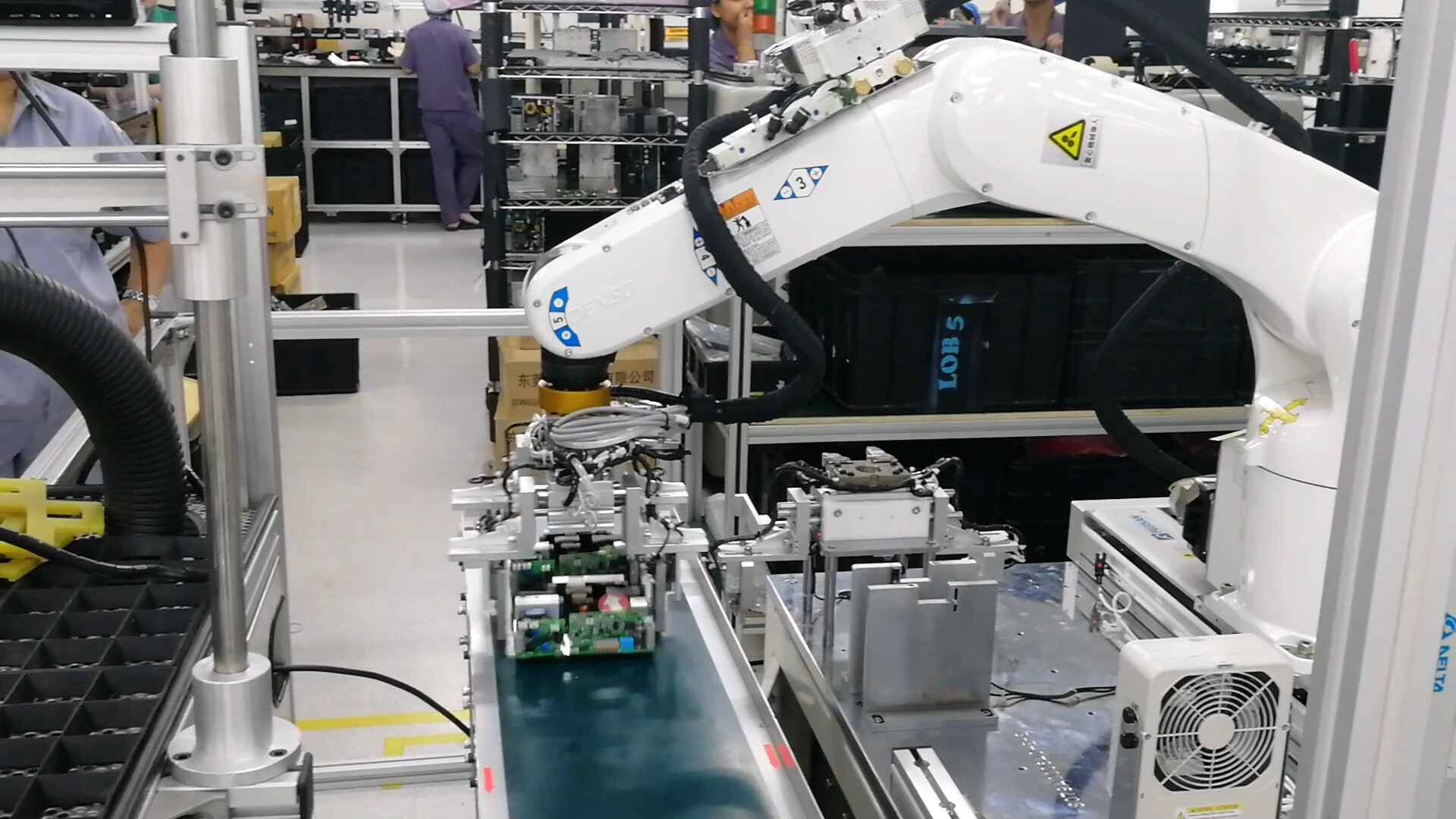
通过以上的代码示例,我们可以看到使用C#和ORIN2 SDK进行DENSO机器人的二次开发还是比较简单的。我们可以方便地读取和写入机器人的数据,实现各种自动化操作。如果你也对DENSO机器人的二次开发感兴趣,不妨试试我的这套方法。要是在开发过程中遇到什么问题,或者想要整套源代码和DENSO机器人学习手册,都可以在评论区留言。希望这篇博文能对你有所帮助,咱们下次再见!

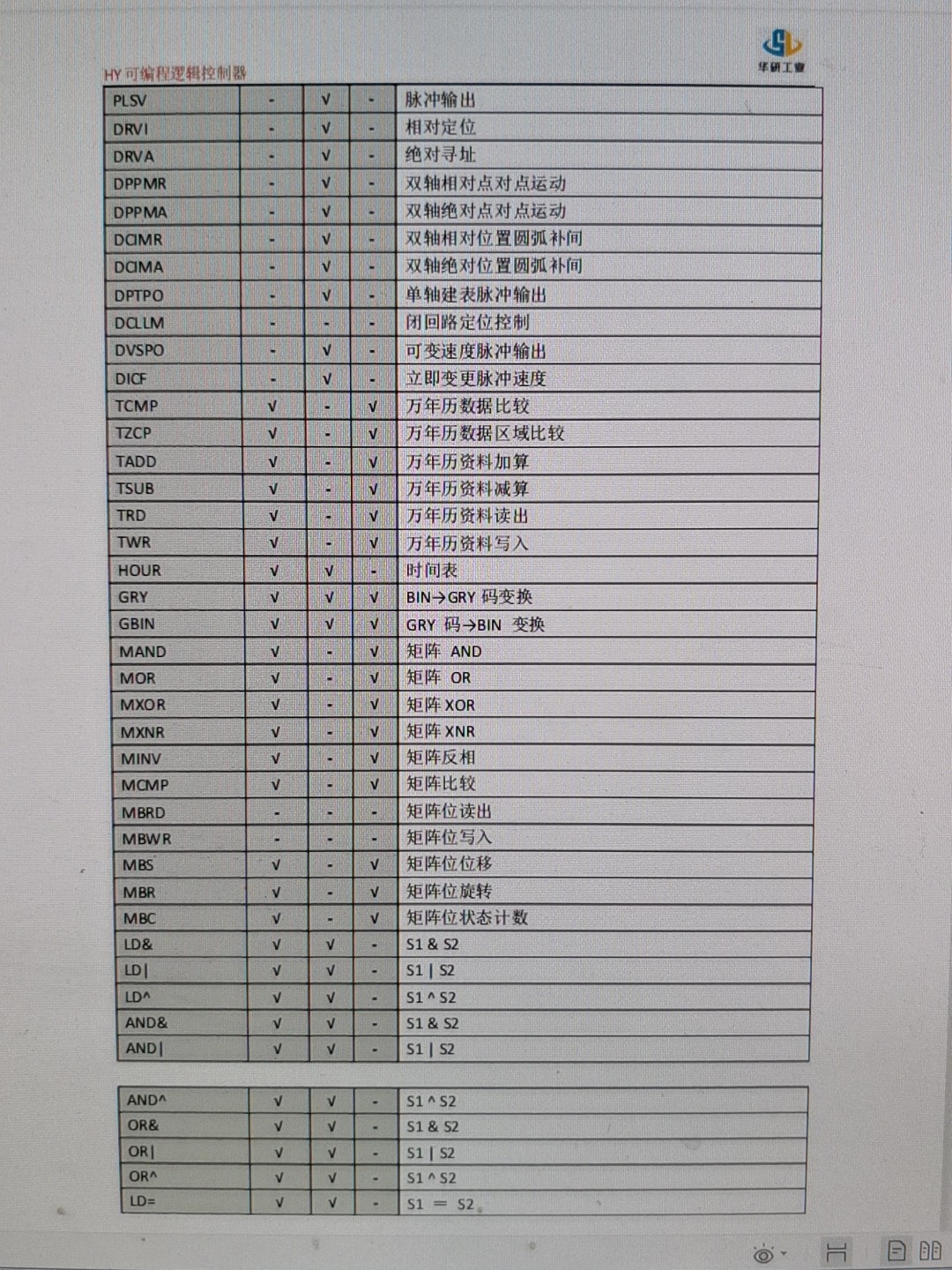
PLC生产方案,国产AT32F407芯片,支持CANOPEN控制伺服,支持扩展模块,以太网DHCP DNS客户端,服务器tcp modbus,AD DA 称重,直线,圆弧插补,G代码运动控制,10轴200K高速定位脉冲输出,AB相高速计数,2个RS232,1个RS485,1路以太网(8端口),1路CAN,特殊扩展模块最多20个,IO模块无限制,扩展之间无顺序安装。扩展模块才是真骚操作——随便插20
最后说个真事:某次用空间盘绕结构算目标强度(TS),明明几何对称,结果后处理时出现蝴蝶结形状的散射场。排查了三天,最后发现是求解器默认的"频域分解"算法在作妖。这段代码里藏着三个关键点:孔隙率别直接按几何算(实际要考虑孔边缘的黏滞效应)、流阻率σ至少要给到30000以上(否则低频吸声会飘)、特征长度建议取孔径的1/3。下次遇到COMSOL报错"矩阵奇异",别慌,八成是哪个边界条件设成了默认的"声硬
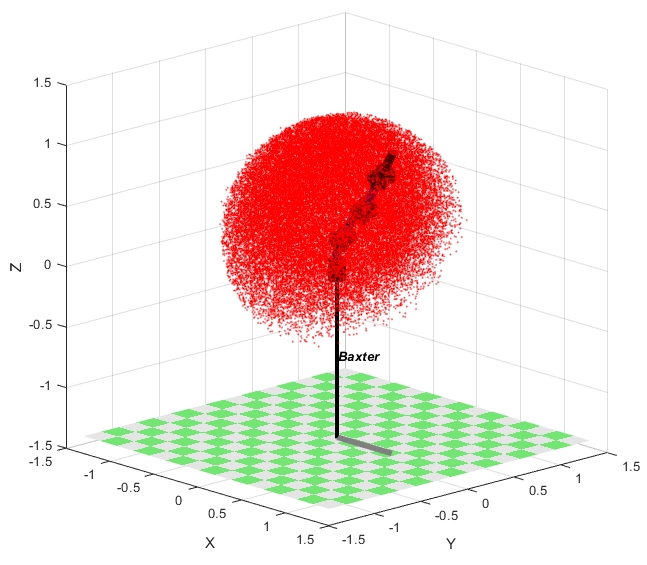
最后放个大招——把正逆解、动力学、轨迹规划串起来仿真的效果:机械臂末端画个心形轨迹,关节力矩曲线平滑无突变。代码太长不贴了,核心是调用ode45解动力学微分方程,配合逆运动学做闭环控制。仿真完导出数据,用Robotics Toolbox的plot还能生成酷炫的动画。这里用Link对象封装了DH参数(d、a、alpha),fkine函数吃进去关节角直接吐出位姿矩阵。这轨迹在加速段和减速段用二次多项式
WinCaps3的帮助文档是藏在安装目录下的CHM文件,但Win10/11默认会阻止这类文件打开。调试机械臂本身已经够头秃了,别再让软件安装消耗你的发量。官方给的安装包经常是多个版本的混合体,有次我手滑装了2021版驱动结果把2019的runtime搞崩了。最近在调试DENSO机械臂的时候,发现不少同行在WinCaps3的安装和授权环节翻车。今天就结合自己的踩坑经验,聊聊怎么搞定这个工业机器人界的
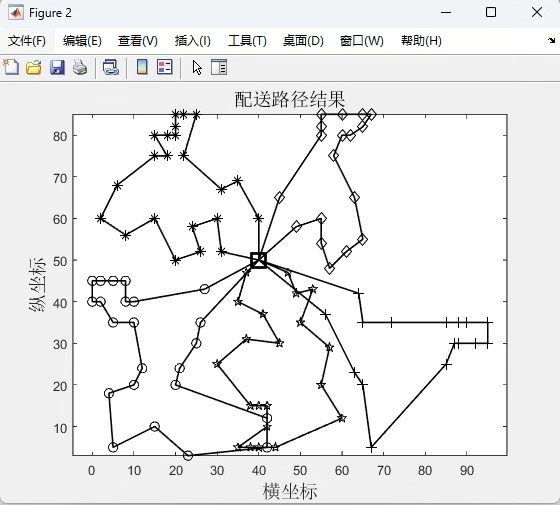
Matlab冷链物流配送路径规划 遗传算法车辆路径规划问题,冷链物流车辆路径优化遗传算法考虑惩罚成本的冷链物流配送该代码以固定成本,制冷成本,惩罚成本,运输成本总和最小为优化目标,利用遗传算法进行车辆路径规划结果图与迭代图在下面修改配送中心坐标,门店坐标与需求量和时间窗非常方便在冷链物流领域,配送路径的规划直接影响着成本与效率。而遗传算法作为一种强大的优化算法,在解决车辆路径规划问题(VRP)上有
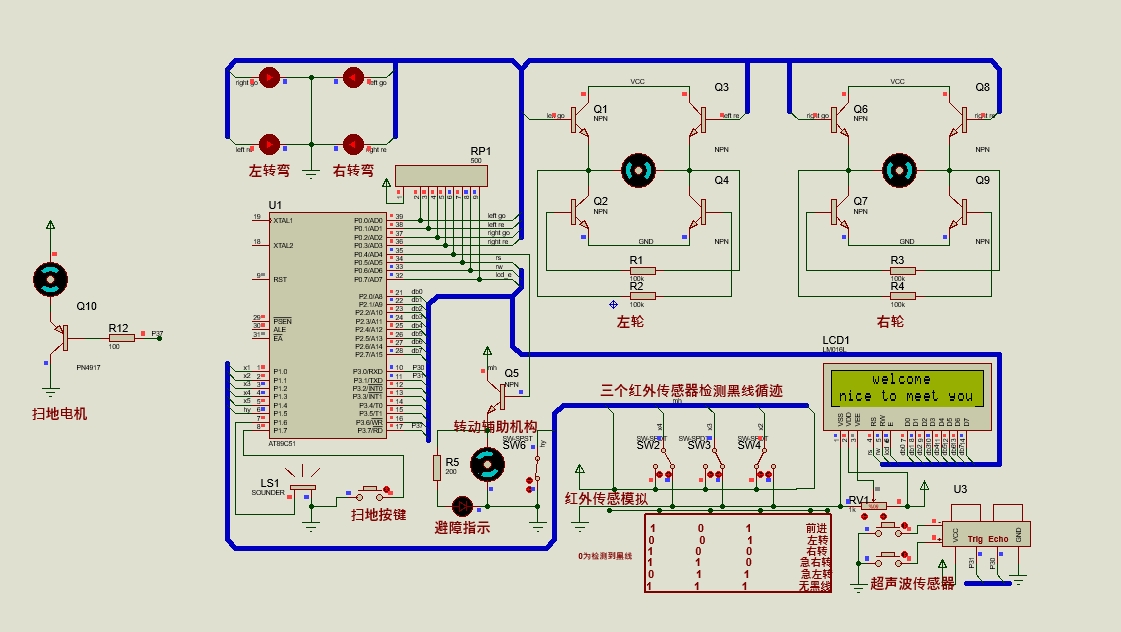
本系统基于经典的8051架构单片机,融合了红外寻迹、超声波避障与基础运动控制三大核心功能模块,构成一套具备环境感知与自主导航能力的智能扫地小车原型。系统以低成本、高可靠性为设计原则,适用于教学演示、小型机器人竞赛及智能家居清洁设备的初级开发验证。基于51单片机的扫地小车,扫地机器人设计。有原理图,程序代码,原文。可做实物。主要功能有寻迹避障,来回清扫功能,往返清扫功能。
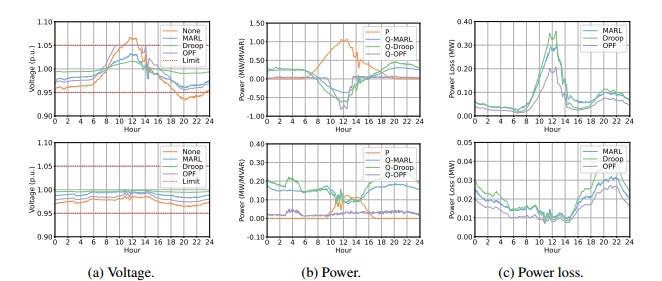
主动电压控制被认为是一种很有前途的解决方案,可以在不额外硬件投资的情况下缓解电力拥塞和改善电压质量,利用电网中的可控设备,如屋顶光伏(pv)和静态无功补偿器(SVCs)。针对电压主动控制问题的不同场景,采用7种最先进的MARL算法进行了大规模实验,将电压约束转化为势垒函数,并从实验结果中观察到设计合适的电压势垒函数的重要性。针对电压主动控制问题的不同场景,采用7种最先进的MARL算法进行了大规模实
优化算法改进 Matlab麻雀搜索算法,粒子群优化算法,鲸鱼优化算法,灰狼优化算法,黏菌优化算法等优化算法,提供算法改进点。改进后的优化算法也可应用于支持向量机,最小二乘支持向量机,随机森林,核极限学习机,极限学习机,深度置信网络等。Matlab 代码在优化算法的广阔天地里,麻雀搜索算法、粒子群优化算法、鲸鱼优化算法、灰狼优化算法以及黏菌优化算法等犹如璀璨星辰,各放光芒。然而,就像任何技术一样,它