




- @QAMroLAYzwtU
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
有回我碰上个案例,dyr里发电机名写的是'GEN1'而raw文件里是'Gen 1',结果动态初始化直接报错,愣是排查了两小时才找到这字符差异。每个节点数据集的特殊设定——比如两区域系统里隐藏的AGC控制逻辑,或者39节点系统里发电机的特殊调速器模型——这些藏在数据文件里的魔鬼,才是真正考验工程师功力的地方。这里容易踩的坑是发电机数据列的对应关系,MATPOWER的gen矩阵有21列参数,新加机组时
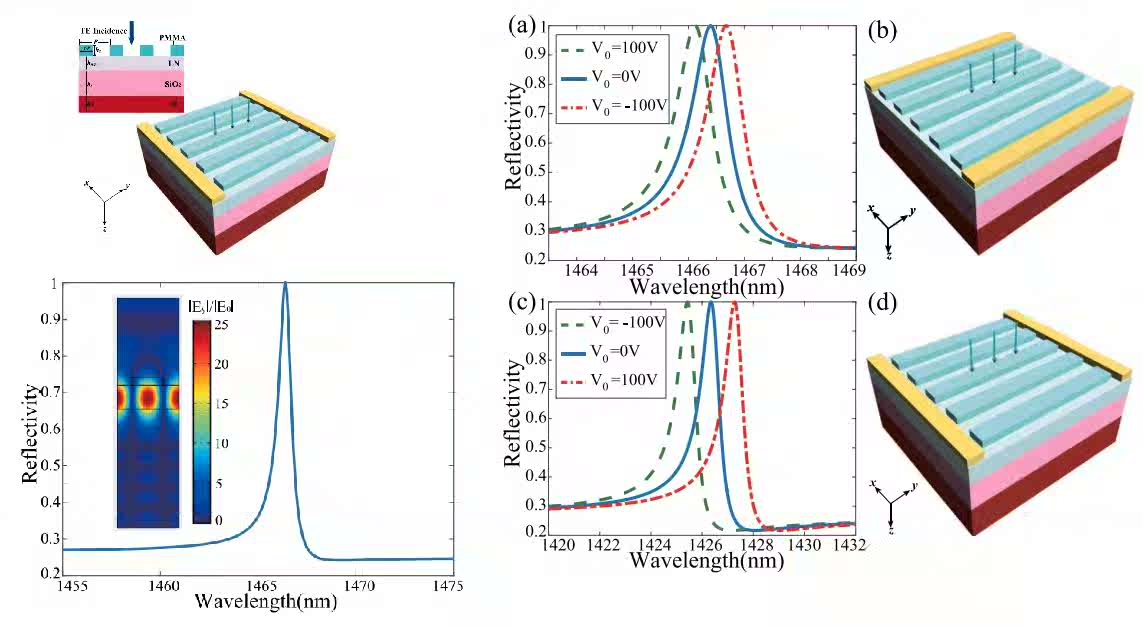
Comsol铌酸锂不同切向设置x切铌酸锂、z切铌酸锂 归一化电场强度设置、加电压计算折射率及反射率在光学与材料模拟领域,Comsol是一款功能强大的工具,今天咱就来唠唠Comsol中铌酸锂不同切向设置以及相关参数计算的事儿。
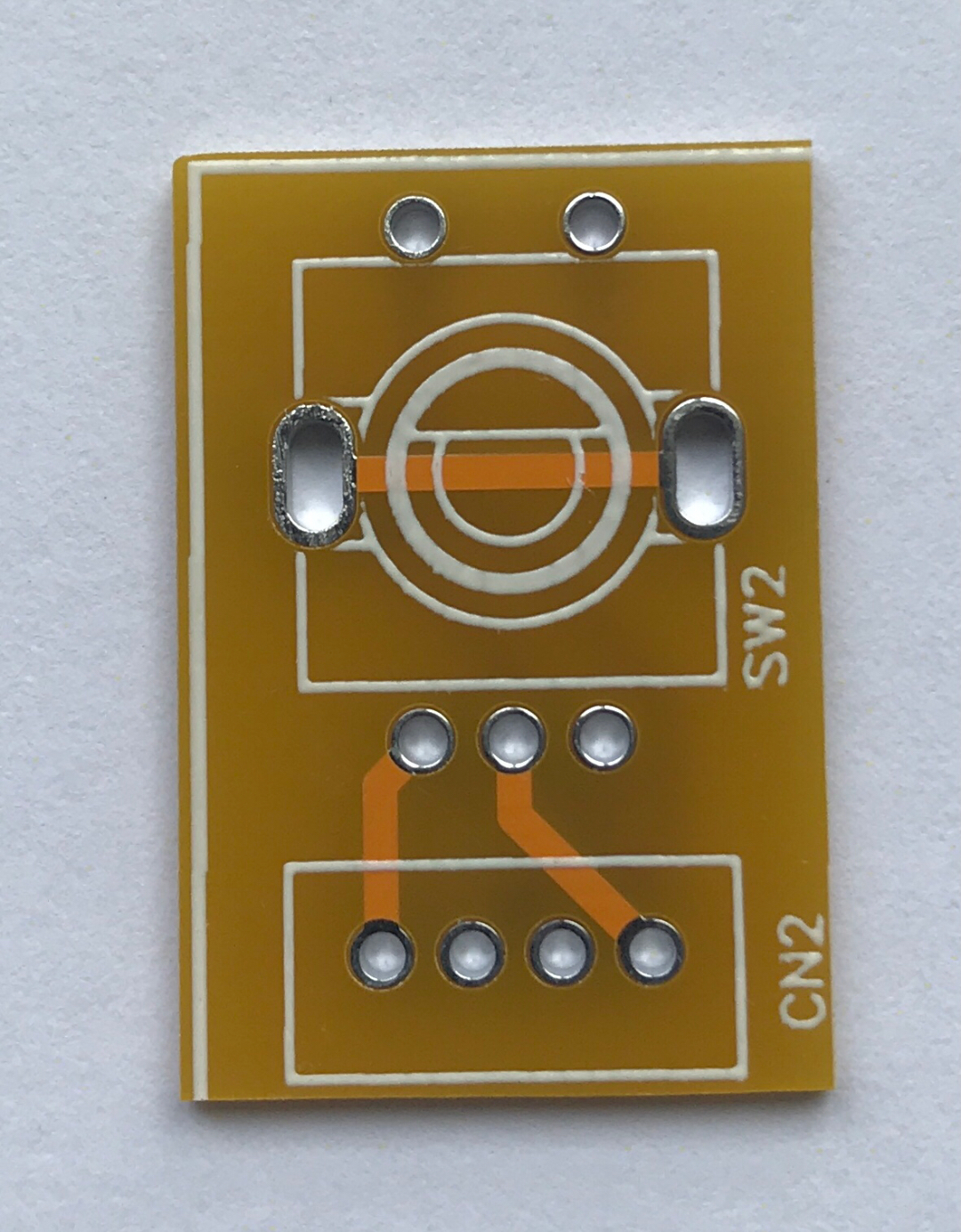
烧录好程序的单片机芯片一片,空PCB一片,旋转编码器用PCB一片,硬件电路图一份,元件清单一份,使用说明一份,大家按图索骥在PCB上焊装好硬件,插上单片机芯片即可投入使用。烧录好程序的单片机芯片一片,空PCB一片,旋转编码器用PCB一片,硬件电路图一份,元件清单一份,使用说明一份,大家按图索骥在PCB上焊装好硬件,插上单片机芯片即可投入使用。用旋转编码器进行调台操作,既有传统旋钮调台的手感与乐趣,
去魔术公式里把C参数调小点,但别怪我没提醒,抓地力降了小心推头推成推土机。说到底,这个模型就像乐高,能拼出前驱车的温顺,也能调出四驱猛兽的野性。→包含模块:转向系统,整车系统,悬架系统,魔术轮胎pac2002,车轮系统,PI驾驶员模块等。→包含模块:转向系统,整车系统,悬架系统,魔术轮胎pac2002,车轮系统,PI驾驶员模块等。→十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,四
在实际的电商前台商城里,商品展示肯定要复杂得多,但这个模板就把这些复杂的逻辑都梳理好了,比如怎么展示商品图片、名称、描述、价格,甚至可能还包括了不同尺寸屏幕下的适配,而我们只需要基于它进行调整优化就好。这个模板涵盖了电商所有核心模块,商品、订单、库存、用户、促销、运营、内容等等,真的是一应俱全。总之,这个电商前台商城原型模板真的是个宝藏,能帮我们节省大量时间和精力,强烈推荐给各位互联网产品经理和正
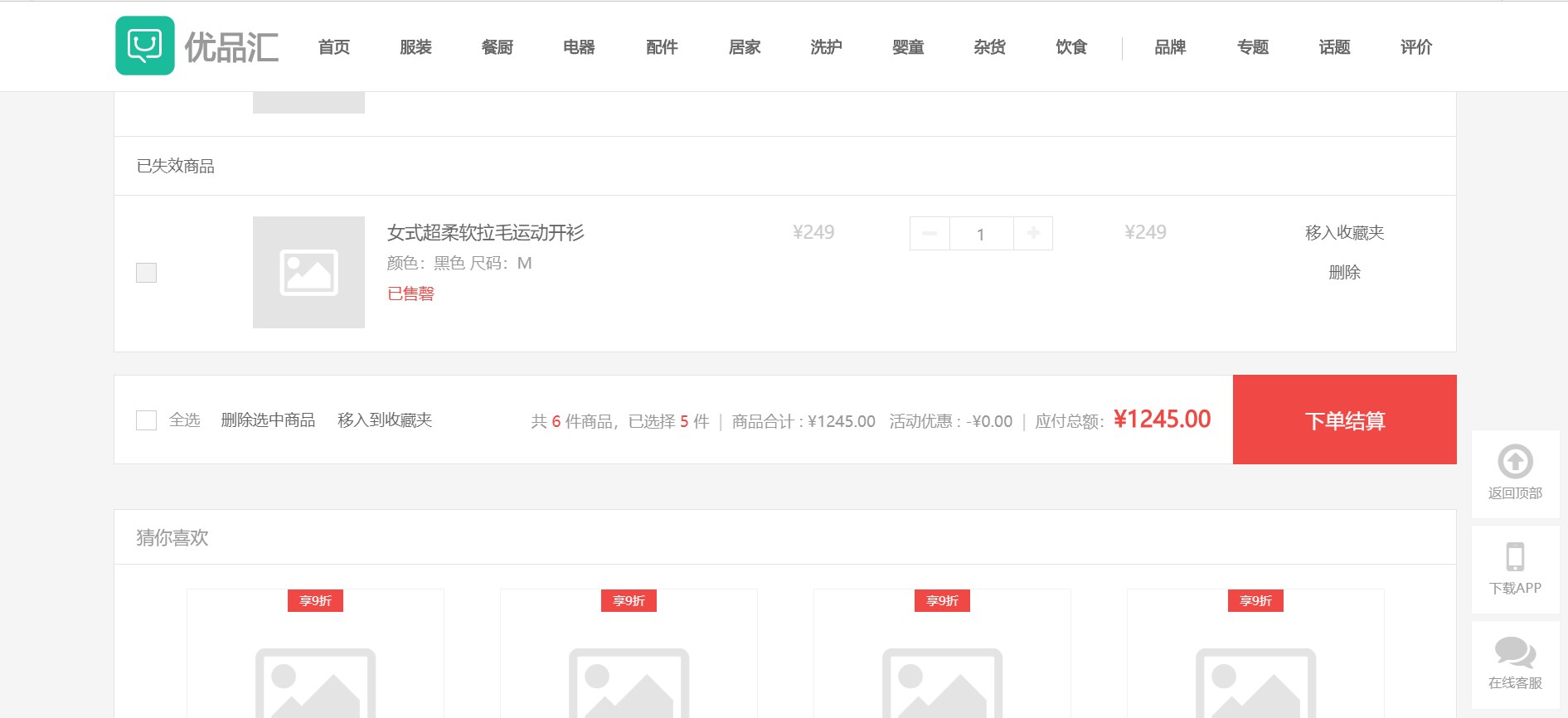
电商客户端原型模板#产品原型#Axure#文件大小8.4M,涵盖客户端常见核心模块:首页、分类、专题、评价、我的等。对于想做产品的同学或者想深入了解电商客户端系统设计的朋友,极具研究学习价值和办公使用价值!致力于让产品人专注产品本身,不受原型实现的困扰~适合人群:互联网产品经理、学习使用axure的同学最近在研究电商客户端的设计,发现了一个超棒的电商客户端原型模板,必须来给大家分享分享。

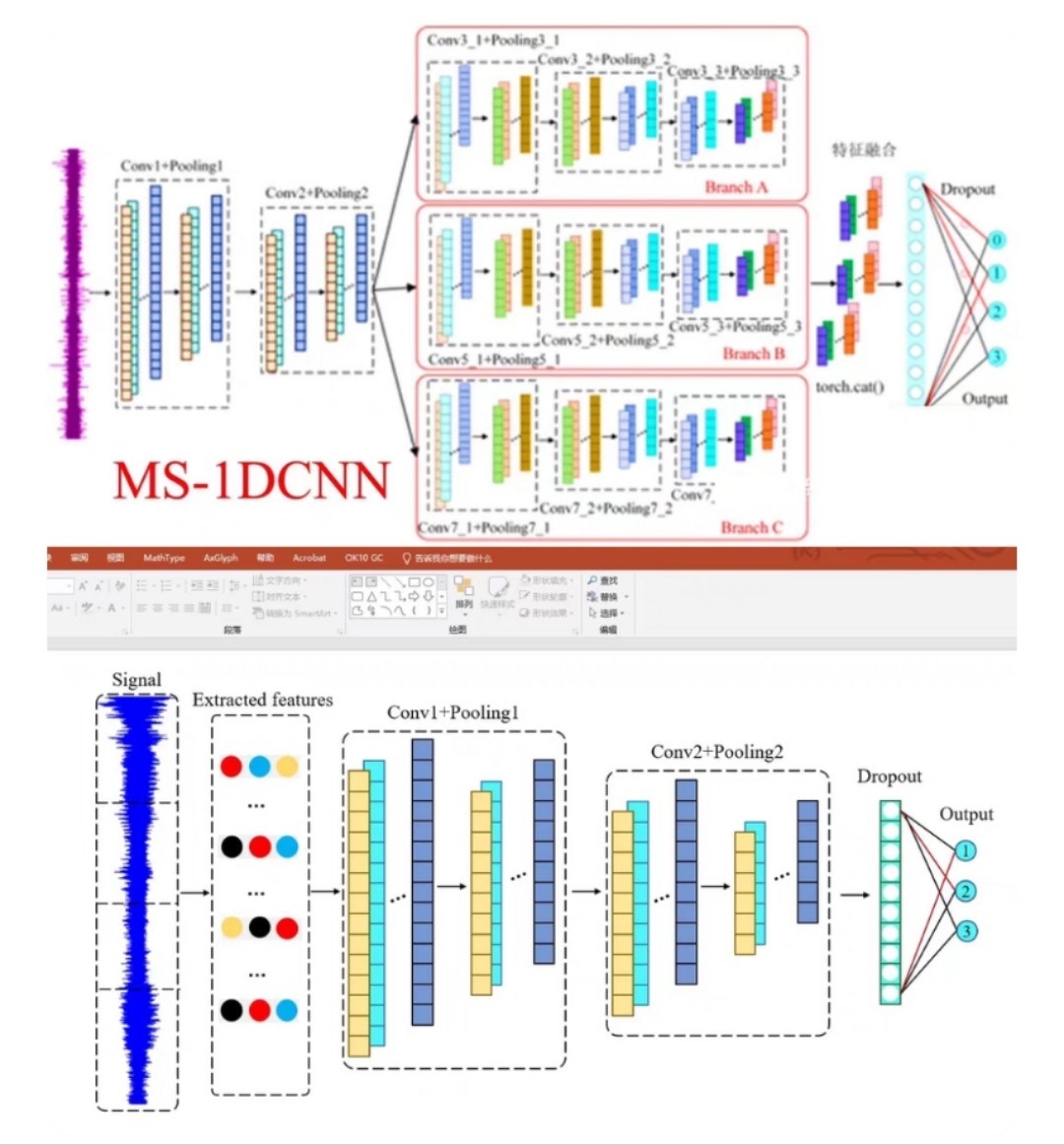
基于多尺度一维卷积神经网络(MS-1DCNN)的故障诊断方法|||研究,深度学习框架是pytorch。西储大学故障诊断识别率为97.5%(验证集)以上很好运行的适用于刚上手故障诊断的同学,就是从数据处理,到最后出图可视化完整一套流程,看完这个会对故障诊断流程有个清晰认识。数据集为凯斯西储大学轴承数据。嘿,刚上手故障诊断的同学们!今天咱来唠唠基于多尺度一维卷积神经网络(MS - 1DCNN)的故障诊
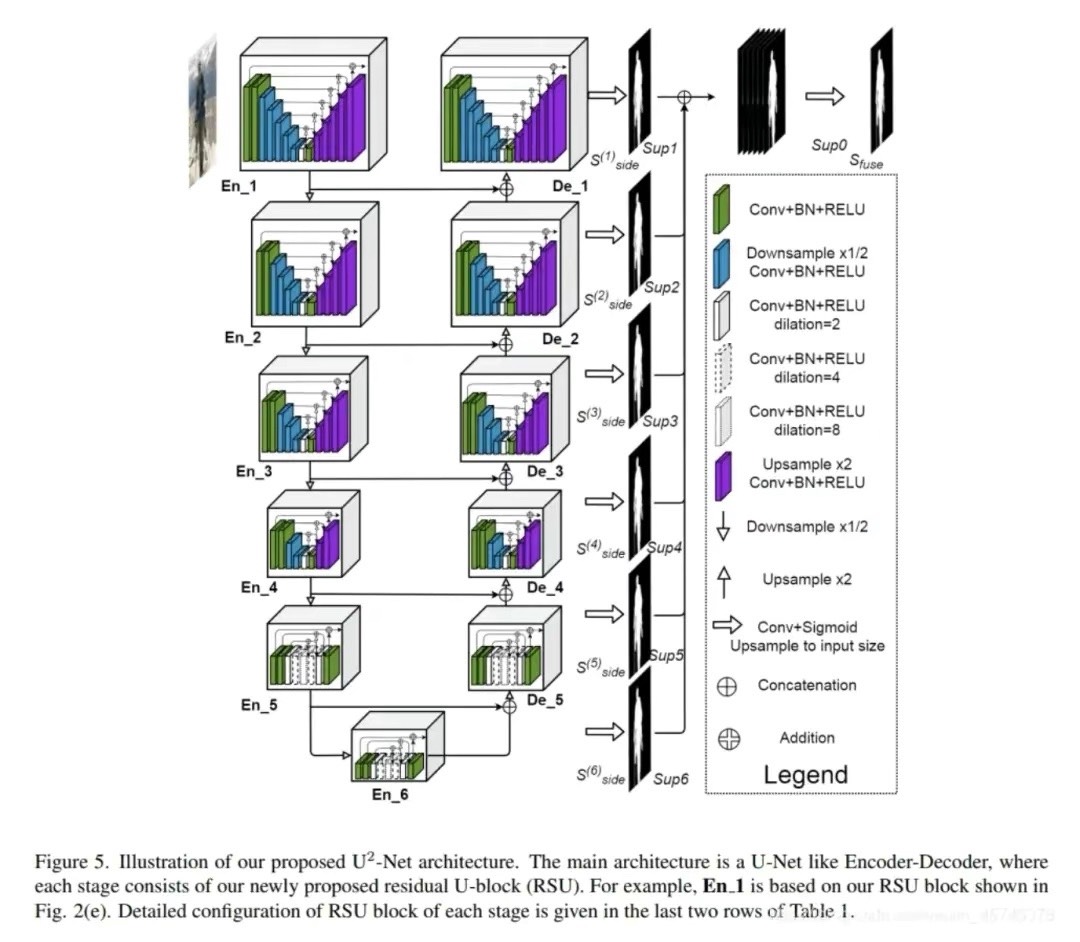
从经典的Unet到花式改款的Unet++,再到Transformer跨界选手SwinUnet,每个模型都有自己独特的"骚操作"。曾经有个项目用Unet++在验证集刷到95%的mIoU,结果在产线摄像头前直接掉到70%,最后发现是动态场景的光照变化让BN层统计量漂移了。但实际部署时发现,拼接后的通道数爆炸会导致显存占用飙升,特别是处理1024x1024的高清病理切片时,差点把显卡送走。更坑的是在实际
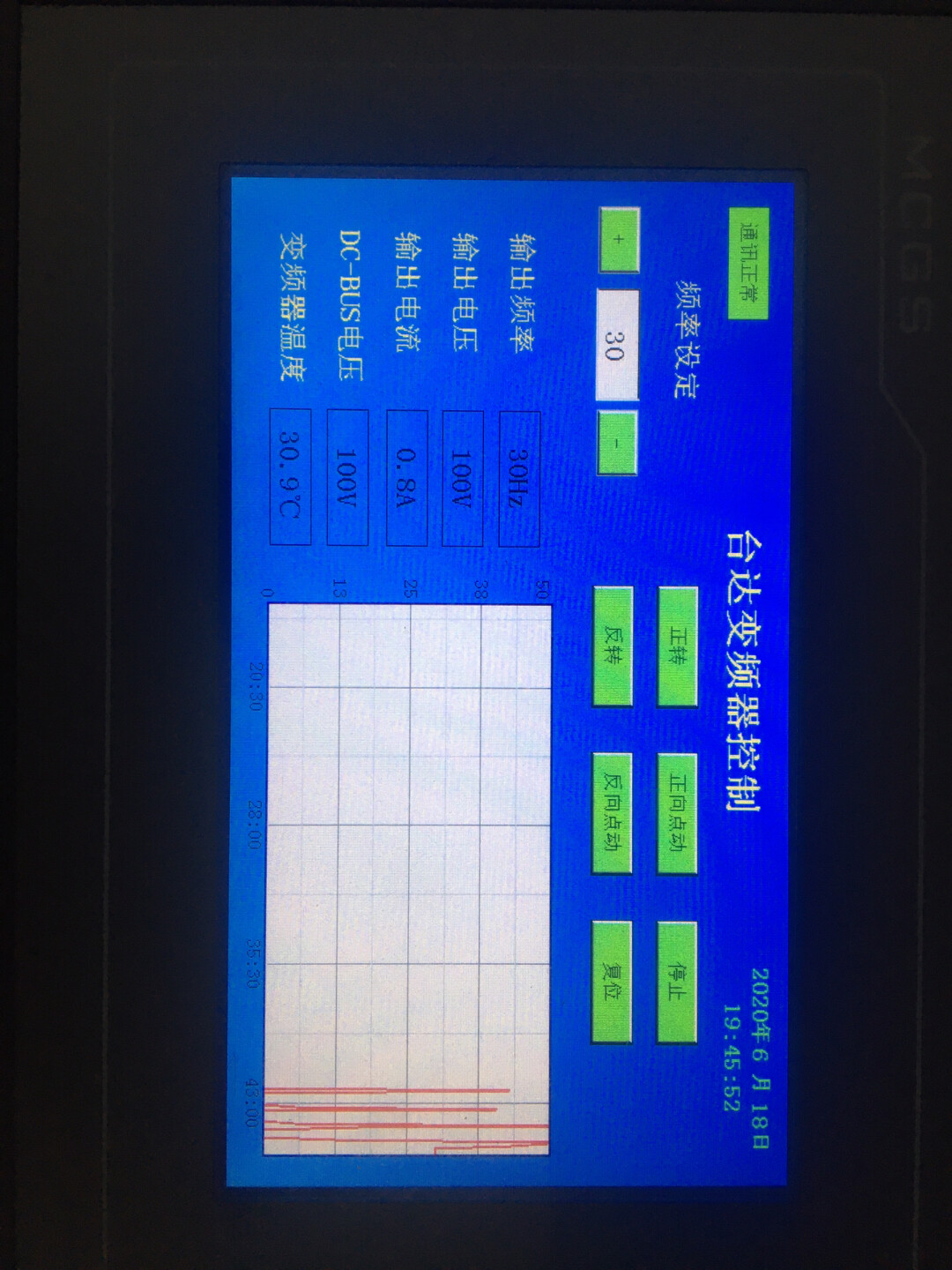
在MCGS的变量窗口中,定义一些变量来与变频器的功能对应。比如定义“频率设定值”变量,数据类型为数值型。将这个变量与设备窗口中台达VFD - M变频器的“频率设定”通道进行连接。这样,当我们在触摸屏上修改“频率设定值”变量时,就相当于向变频器发送了频率设定指令。
今儿咱们聊聊用模型预测控制(MPC)搞轨迹跟踪的实战操作,手把手带各位在Matlab里实现这个控制逻辑。注意权重矩阵Q的选择——建议先把横向误差的权重设为1,其他参数按量级调整,比如角度误差可能比位置误差小两个数量级。基于模型预测控制的无人驾驶车辆轨迹跟踪问题研究,matlab 附有MATLAB程序与详细的建模过程,研究车辆转向的同学可以作为参考。基于模型预测控制的无人驾驶车辆轨迹跟踪问题研究,m
