登录社区云,与社区用户共同成长
邀请您加入社区
7月3日消息,7月2日,一则人事变动在AI圈引发关注:1997年出生的孙天祥正式加入百度,出任基础模型研发部(BMU)负责人,同时进入百度模型委员会(BMC)。腾讯方面,除引入姚顺雨担任首席AI科学家外,2026年3月正式启动“青云计划”实习生招聘,面向AI大模型相关技术领域的顶尖本硕博同学,开放大语言模型、多模态、智能体等六大技术领域。其中,薪酬政策上不封顶。2026届秋季校园招聘计划发放超70
Gunicorn 应用入口错误坑:配置成app:app,但项目用的是应用工厂解决:严格对应项目的启动入口Nginx 反向代理地址不匹配proxy_pass写了但 Gunicorn 监听的是解决:保证proxy_pass和 Gunicorn 的-b地址完全一致SELinux 导致 502 错误坑:Nginx 配置正确,但返回 502解决:执行开放网络权限访问端口错误坑:浏览器输入(Nginx 监听的
A5数据通过以上步骤,我们在 Ubuntu 22.04 上成功部署了一个使用 Gunicorn 和 Nginx 的 Django Web 应用。部署完成后,我们配置了 Gunicorn 作为应用服务器,并使用 Nginx 作为反向代理服务器处理请求。通过使用 Gunicorn 的多进程和 Nginx 的压缩优化,我们提高了 Web 应用的性能和响应速度。这种部署方式适用于高并发场景,并且能够有效扩
本项目为 Flask 工厂函数模式开发的校园众筹平台,需部署在 CentOS 系统中,实现的生产环境能力。
当时访问静态文件依然403,后来发现上级目录的权限不对。配置环境中遇到的一个小问题 访问 访问静态文件403。此前已经修改了静态目录权限。
本项目是基于 Django 开发的,包含首页、个人介绍、静态页面展示、后台管理等功能,可作为课程作业、个人作品集展示使用。
2. 执行静态文件收集 在项目根目录执行命令: ```bash python manage.py collectstatic ``` 终端会提示`You have requested to collect static files...`,输入`yes`回车确认,执行成功后会显示: ``` 127 static files copied to 'D:\Code\djangotutorial\sta
以上步骤完成后,你的Flask应用将通过Nginx和Gunicorn在阿里云ECS服务器上运行。,查看Flask应用是否运行正常。,应能看到Flask应用的页面。
通过合理的配置(如工作进程数、worker 类型、超时设置)和 Nginx 的配合,Gunicorn 能高效、稳定地运行 Web 应用。Gunicorn(Green Unicorn)是一个用于 Python Web 应用的 WSGI HTTP 服务器,广泛用于生产环境中部署 Flask、Django 等框架的 Web 应用。五、Gunicorn 与 Nginx 配合生产环境中,Gunicorn 通
自动类型推导auto和decltype的出现,减少了冗余的类型声明,让代码更加简洁。学习现代C++时,建议从C++11的核心特性开始,如auto、智能指针和Lambda表达式,然后逐步掌握移动语义和更高级的模板特性。每个版本都解决了一些长期存在的痛点,并引入了全新的编程范式,使得C++在保持高性能的同时,也能编写出更为简洁、安全和可维护的代码。从自动类型推导到更强大的容器,从并发编程支持到元编程的
计算公式为: $$ \text{圈复杂度} = E - N + 2P $$ 其中,$E$为边数,$N$为节点数,$P$为连通分量数。计算公式为: $$ \text{测试覆盖率} = \frac{\text{覆盖代码行数}}{\text{总代码行数}} \times 100% $$ 未覆盖区域导致回归缺陷率上升,平均每月$5$个新缺陷。:数据处理模块存在延迟问题,平均响应时间$ \geq 500\t
跨模态交互是瓶颈,需避免全连接交叉计算: $$ \text{Efficiency} = \frac{\text{Task Accuracy}}{\text{FLOPs}} \propto \frac{1}{| \mathbf{V} \times \mathbf{L} |_F} $$ 其中 $\mathbf{V}$ 为视觉特征矩阵,$\mathbf{L}$ 为语言特征矩阵。通过分层优化和硬件协同设计
优先选择近期的技术文档、官方手册或高评分社区(如 Stack Overflow、GitHub 讨论),避免过时或未经验证的内容。尝试组合多个关键词或使用引号限定精确短语,例如“Python 多线程性能优化”而非简单的“Python 多线程”。将检索内容按逻辑分类(如原理、代码、案例)可提升效率。借助翻译工具或跨平台搜索(如 arXiv 论文)扩展信息来源。对于复杂问题,记录解决过程便于回溯,例如使
以下是为“DeepSeek”项目制定的前后端协作规范与代码风格指南。本指南基于行业最佳实践,旨在提升团队协作效率、代码可维护性和系统可靠性。结构分为三大部分:引言(概述目的和范围)、前后端协作规范(定义接口、错误处理等)、代码风格指南(分前端和后端)。内容真实可靠,参考了主流技术栈(如前端使用React/TypeScript,后端使用Node.js/Python)。
DeepSeek Forums: A Haven for Knowledge SeekersIn the vast expanse of the digital world, there exists a platform that has become a beacon for those in pursuit of knowledge and meaningful discussions: D
web服务器网关接口,只是一个规范,是一个协议,不是服务器,只是服务器和应用程序通信的接口规范。WSGI 协议 规定了Web服务器与Python Web应用程序或框架之间的建议标准接口,以促进跨各种Web服务器的Web应用程序可移植性。WSGI的目标是促进现有服务器和应用程序或web框架的轻松互连。就是一个工具,可以把想跑的程序、库文件、配置文件都一起打包。然后在任何一个计算机的节点上,都可以使用
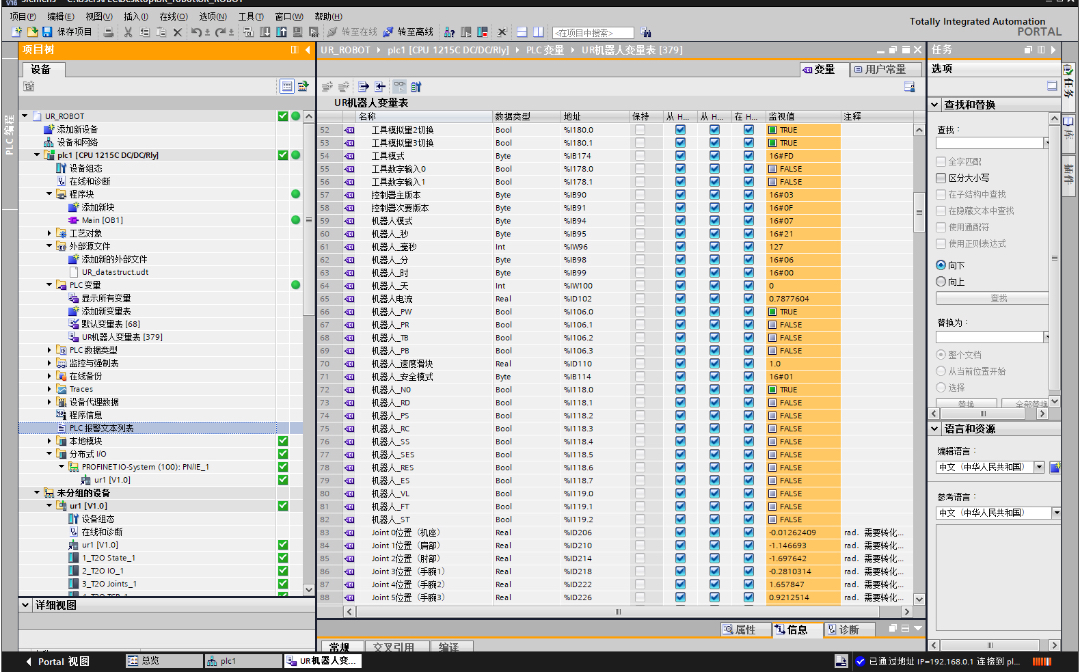
西门子plc博图与优傲UR机器人进行Profinet通讯,s7-1200/1500与UR机器人通讯,实际应用案例使用中,可提供GSD配置文件,设置说明书,和博图plc程序,目前版本为v15或以上,程序只提供配置好的内容配置在自动化控制领域,西门子PLC与优傲UR机器人的协同工作越来越常见,通过Profinet通讯实现二者高效协作能大大提升生产效率。今天就来聊聊S7 - 1200/1500与UR机器
公共安全:能加强安防监控,通过图像识别和数据分析技术,实时监测公共场所,发现异常行为和安全隐患;实现智能物流配送,优化物流路径规划和货物调度,提高配送效率和准确性。- 高速发展与广泛应用(21世纪初至今):深度学习算法广泛应用,AlphaGo战胜围棋世界冠军李世石,自然语言处理、图像识别等领域取得显著进步,AI产品如IBM Watson、苹果Siri、亚马逊Echo等涌现。- 低谷期(20世纪70
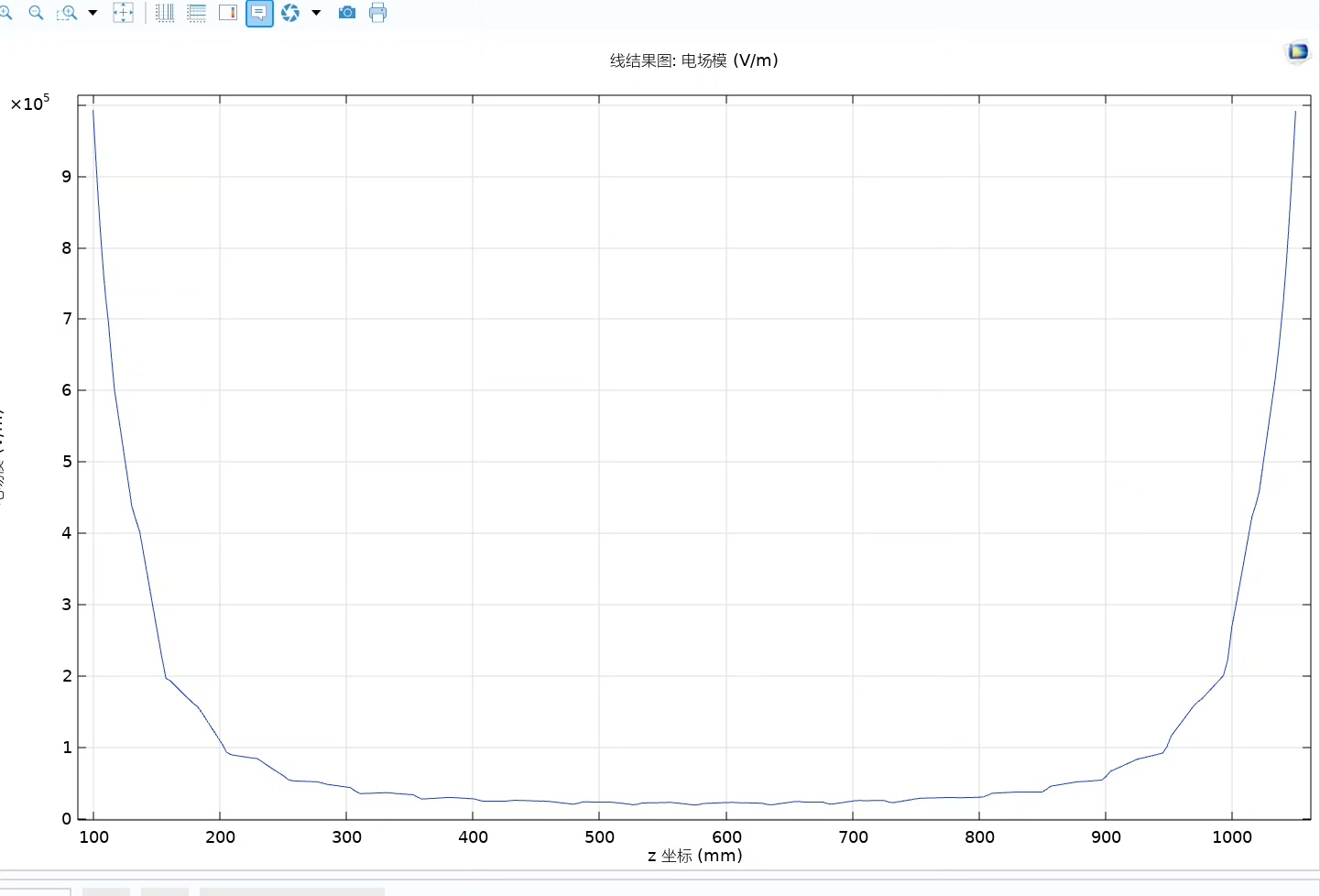
仿真结果显示,最大场强出现在第三片伞裙根部,达到9.8kV/mm,比光滑绝缘子结构降低了约42%。计算发现,这处的电场强度能达到18.7kV/mm,接近硅橡胶的击穿阈值。有意思的是旋转角参数用了π/6而不是直接写30度,毕竟COMSOL内部计算都用弧度制,这么写能避免单位转换带来的计算误差。等软件启动的间隙,突然想起上次变电站老师傅念叨的110kV复合绝缘子电场畸变问题,这次干脆用有限元法扒开它的
本文深入探讨了云原生微服务架构下高并发计算节点的性能优化策略。文章首先分析了Gunicorn预派生多进程模型如何通过内核级套接字复用和信号机制实现高效负载均衡,突破Python GIL限制。然后重点阐述了如何利用NumPy连续内存块与操作系统共享内存机制(SharedMemory)实现零拷贝进程间通信,将传统IPC开销从O(N)降至O(1)。文中提供了企业级共享内存矩阵引擎实现,通过mmap系统调
在你的环境中,你可以使用conda或pip来安装所需的包。conda create --name 环境名 python=3.10。conda remove --name 环境名 requests。conda env remove --name 环境名。在conda 命令窗口中输入命令创建永久源。conda activate 环境名。如果实在安装不上,则可以离线安装,在。仅删除环境里的request
《工业级AI特征工程的三重防御体系》 摘要: 本文系统阐述了构建高可用AI特征工程的核心技术体系。在数据预处理层面,通过NumPy的连续内存布局和SIMD指令集实现两个数量级的计算加速;在流程控制层面,基于Scikit-Learn的状态机协议确保训练/预测环境的数据一致性;在质量保障层面,采用Pytest构建自动化测试矩阵,覆盖空值填充、维度校验等12类边界场景。实践表明,这种融合底层优化(计算效
Gunicorn是一款流行的Python WSGI HTTP服务器,兼容Django、Flask等主流框架,支持同步/异步工作模式。最新v25版本新增HTTP/2支持和工作进程优化功能,适用于不同负载场景。其特点包括:多种工作进程类型选择(sync/gthread/gevent/asgi)、优雅的进程管理、低资源消耗。通过pip安装后,可简单命令行启动或配置文件管理。该项目采用MIT协议,由社区维
本文概述了Python Web应用的典型分层架构:Nginx作为反向代理层处理SSL和静态文件,转发动态请求至Gunicorn;Gunicorn作为WSGI服务器管理多进程Worker处理请求;应用层(Flask/Django等)遵循WSGI规范响应;数据层通过ORM/SDK访问各类存储。对比了Unix Socket与TCP通信的适用场景,并建议使用systemd管理服务以实现高可用。核心要点包括
本文介绍如何使用Gunicorn+Nginx+Docker部署Django项目。首先解析三者的作用:Gunicorn作为WSGI服务器运行Python应用,Nginx处理反向代理和静态文件,Docker解决环境差异问题。然后通过示例项目演示部署流程:编写Dockerfile配置Python环境并启动Gunicorn;使用Docker Compose编排web和nginx服务,通过共享卷处理静态文件
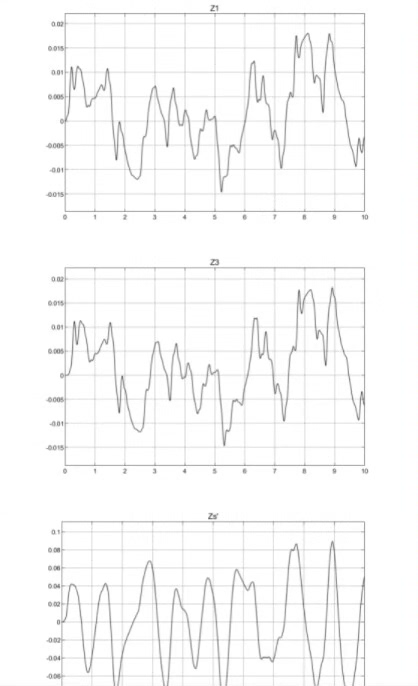
本项目基于TCN-Transformer融合架构,实现了一套完整的时序预测解决方案,具备高精度、易扩展、工程化的特点。技术层面:融合TCN与Transformer的优势,解决“局部特征+全局依赖”的双重建模问题。工程层面:模块化设计、超参数集中管理、完善的评估体系,便于快速适配不同时序预测场景。
以上种种验证码只是当前验证码市场的一小部分,针对图像验证码,可以根据机器学习技术对大量的训练集进行学习,进一步达到破解的目的,亦或是接入人工打码平台,而对于简单的字符数字识别验证码,则有对应的成熟的第三方库可以轻易破解,网站应用加入验证码的目的只是提高或者延长攻击者的破解周期和成本代价而已。是谷歌推出的免费人机识别技术,使用图像验证码/用户行为评分来区别当前网站应用的用户是机器人还是正常人类。,即
在2026年这个被算法、流量和碎片化聆听定义的时代,他们的合作像一座孤岛,或更准确地说,像一片精心呵护的雨林——里面充满了古老律动的呼吸、未来电声的光晕,以及将两者无缝缝合的、属于这个时代的工匠精神。当84岁的大师在录音室里感到“孩童般的快乐”,当全能制作人动用一切技术只为捕捉那一丝“极致的真实”时,音乐便超越了娱乐与商品,回归到它最原始的形态:一次灵魂的寻根,一场跨越半个世纪的、温暖的握手。在为
步骤输入输出关键函数/对象1TCP 字节流HTTP 请求结构2HTTP 请求WSGIenviron3environ响应体迭代器4响应状态/头/体HTTP 响应字节流write()核心思想:Gunicorn 充当HTTP 协议 ↔ WSGI 接口的“翻译器”。通过这个过程,任何符合 WSGI 标准的 Python Web 应用(Flask、Django、FastAPI 等)都能在 Gunicorn
到这里,这套FastAPI路线已经形成完整闭环:1. 单体CRUD、分层架构与统一异常工程底盘2. SQLite -> MySQL/PostgreSQL持久化与迁移能力3. JWT/OAuth2身份与权限治理4. pytest与TestClient可回归质量护栏5. Uvicorn/Gunicorn +配置 +监控日志上线稳定性按这五步执行,你得到的不只是能跑的FastAPI项目,而是一个可以持续
FastAPI 作为 Python 高性能异步 Web 框架,部署上线却是很多开发者的痛点。本文从环境准备开始,手把手带你完成 FastAPI 生产环境部署,包含 Uvicorn/Gunicorn 启动、Docker 容器化、开机自启、日志配置等全套流程。从零到一,一篇吃透,看完直接照着部署,告别各种坑!
参考文献方面,王老2018年那篇《多体动力学在座椅设计中的应用》给了关键理论支撑,而张工的博士论文第五章提到的耦合振动分析方法,帮我们少走了至少三个月弯路。最后说个冷知识:5自由度模型计算出的最佳阻尼比,在实际装车时反而要下调15%左右。因为仿真时没考虑的真皮座椅的蠕变特性,会偷偷吃掉部分振动能量——所以说,搞仿真不接地气,分分钟被现实打脸啊!详情请csdn搜索博客:3、5自由度座椅悬架,以及5自
FastAPI、Uvicorn和Gunicorn构成了Python Web开发的黄金组合,采用分层架构设计实现高效协作。FastAPI作为业务层处理逻辑,Uvicorn作为ASGI服务器处理协议解析,Gunicorn作为管理层实现多进程管理。开发环境可直接用Uvicorn运行FastAPI,生产环境则由Gunicorn管理多个Uvicorn工作进程,实现高并发和负载均衡。这种组合充分发挥了Fast
显示机组的运行数据,如机组的瞬时发电功率、累计发电量、发电小时数、风轮及电机的转速和风速、风向等,用风玫瑰图、曲线或图表的形式直观地显示出来,显示风电机组的运行状态。显示机组的运行数据,如机组的瞬时发电功率、累计发电量、发电小时数、风轮及电机的转速和风速、风向等,用风玫瑰图、曲线或图表的形式直观地显示出来,显示风电机组的运行状态。风机序号、故障类型、负责人、处理状态、处理时间、描述等,其中故障类型
1 雾计算/边缘计算的网络服务特点边缘计算网络服务主要由几个特点:1)局域网内的请求(可以不用考虑使用SSL)2)并发量和连接数并不会太大(相对于公网的网络请求,千万的并发请求)3)数据请求是固定的,并且数据量不大(可以使用短链接)4)服务器硬件的能力相对有限,没有固定独立的机房。2 适用的网络框架http://python.jobbole.com/87666/3 ...
部署环境: python3.6 +腾讯云服务器开始用uwsgi部署,不太通用,坑贼多,阻碍了很长时间。最后还是选择了gunicorn。安装django,编写代码,调试运行通过。ip:port访问成功安装gunicorn & 配置gunicorn安装gunicornpip install gunicorn设置gunicorn的软连接ln -...
一直在调试的环境下运行 runserver, 加载图像识别模型以及接口测试一切就绪,换到gunicorn就开始timeout, 单个gunicorn启动依然报错,最后再gunicorn配置文件中,修改调timeout的时间,将这个时间加大,模型加载需要很长的时间,这个时间一定要加大,否则模型还没加载完,gunicorn已经达到了延时时间,根据具体情况具体修改此数值...
问题描述:所有依赖都安装了,但是启动项目的时候依旧是出现上面的错误.第2步:当前使用的gunicorn命令的venv环境与项目的是否对应。如果启动成功则说明之前启动命令时,没有用到当前环境的依赖。第3步:如果以上没问题,则强制使用当前环境启动项目。第1步:当前的venv环境与项目的是否对应。
本文将详细介绍如何将Django项目从本地开发环境完整地部署到云服务器生产环境,涵盖从服务器初始化到最终上线的每一个步骤。通过以上完整的8个阶段,您已经成功将Django项目部署到生产环境。记得定期备份数据库和重要文件,并保持系统和依赖包的更新。第七阶段:SSL证书配置(可选但推荐)3.1 PostgreSQL设置。1.2 生成依赖文件和环境配置。2.3 系统更新和基础软件安装。第五阶段:Guni
TOC/TOC。
关于django中几个重要的gunicorn worker的配置 一、worker_class worker_class 是 Gunicorn 的配置参数之一,它指定了工作进程(worker)的类型。不同的 worker_class 提供了不同的并发模型,适合不同类型的应用场景。sync 和 gevent 是两种常见的 worker_class,它们的作用和区别如下: 1. sync(同步 wor
介绍。
为了使用Celery,你需要安装并配置相应的消息中间件(如RabbitMQ或Redis),然后在Django项目中设置Celery。它并不直接提供执行异步任务的功能。想要在使用gunicorn运行的Django项目中执行异步任务,需要将以上提到的异步任务解决方案之一集成到你的项目中,并确保它们可以独立于你的web服务器进程运行。这是一个简化的后台任务库,它将任务存储在数据库中,然后定期通过管理命令
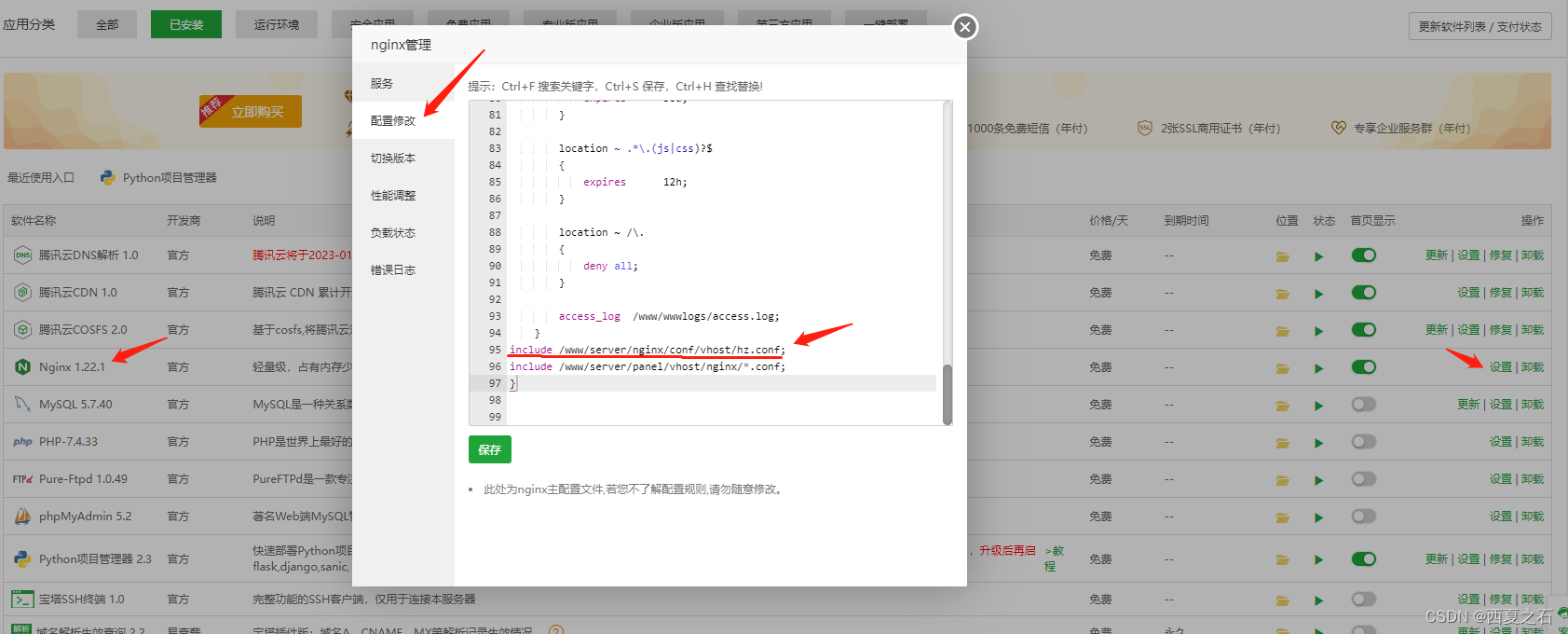
然后在宝塔面板中执行python manage.py collectstatic 收集静态资源文件,此时会将所有静态资源文件收集到static文件夹中。在2023.12.5日我在做另一个项目时出现还是访问不了,还需要在主得urls.py文件中增加以下语句。欢迎大家多多交流,这个问题困扰了我很久,我当时都想花钱请教别人了,没有想到自己摸索出来了。hz.conf是我自己创建的,也是在网上看到的,方便n
【代码】docker uvicorn-gunicorn-fastapi 启动自己的fastapi应用。
本文详细介绍了如何配置 Django 以在 Docker 上运行 Postgres。对于生产环境,我们将添加 Nginx 和 Gunicorn。我们还将了解如何通过 Nginx 提供 Django 静态和媒体文件。建立项目创建一个新的项目目录,然后开始 Django 项目:$ mkdir django-on-docker ...
本文从nginx快速掌握到使用,gunicorn快速掌握到使用,实现小白快速搭建django项目,并对可能出现的报错进行了分析
gunicorn
——gunicorn
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI编程社区
AI编程社区





 AI Agent技术社区
AI Agent技术社区


 DAMO开发者矩阵
DAMO开发者矩阵




 openEuler 社区
openEuler 社区

 AtomGit开源社区
AtomGit开源社区



 全球具身智能开发者社区
全球具身智能开发者社区


 脑启社区
脑启社区



 腾讯云开发者社区
腾讯云开发者社区