
写文章




- @NeoZng
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
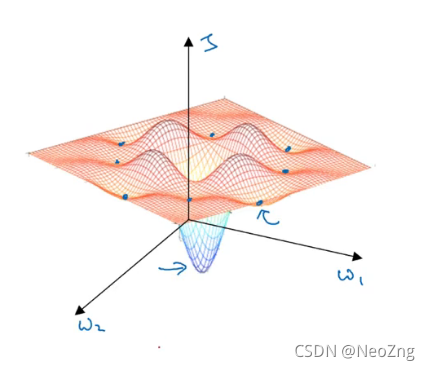
(五)比赛中的CV算法(上2)目标检测初步:神经网络及优化方法
-NeoZng【neozng1@hnu.edu.cn】attention:5.2、5.3、5.4对于新人来说可能有一定难度。若是新人或刚入门的 RMer,可以由此直接跳转道第六部分继续阅读,第六部分看完后再回来这里继续 ~~5.2.目标检测时下RM赛场上的自瞄算法分为两个流派:传统特征提取和神经网络。前一个部分已经介绍了和比赛相关的OpenCV函数,因此为了保证行文的连贯性和整体性又不重复叙述,这
记录一次腾讯实习投递经历(一)
一次腾讯的面试之旅,腾讯计算机视觉算法工程师实习面经。
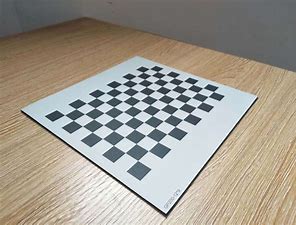
OpenCV相机标定完全指南(有手就行)
在没有任何基础的情况下利用opencv例程完成相机标定(真的是有手就行!)
计算机视觉学习知识框架(思维导图)非常详细
一张计算机视觉和Robomaster视觉组学习的框架图
《了解CV和RoboMaster视觉组》完结啦!
《了解CV和RoboMaster视觉组》完结啦!

机器人工程师入门知识框架(思维导图)
介绍了学习机器人工程和入门Robomaster的一些必备知识。
STM32 HAL I2C(IIC)通信的序列传输(restart condition)
介绍了HAL库的序列传输函数(HAL_I2C_Master/Slave_Seq_Transmit/Receive_IT/DMA)
I2C(IIC)的仲裁、时钟同步和时钟扩展
介绍了I2C使用多主机时的仲裁机制,和从机发起的时钟扩展
Windows安装OpenCV——利用MinGW+CMake从源码编译
介绍了在Windows下利用MinGW和CMake进行OpenCV的安装(不需要Visual Studio!)

Linux安装OpenCV——利用包管理器apt从源仓库安装(绝对是最简单的安装方法)
不需要编译也不需要cmake!介绍了OpenCV最简单的安装方式,利用apt/yum包管理器从源仓库安装!