登录社区云,与社区用户共同成长
邀请您加入社区
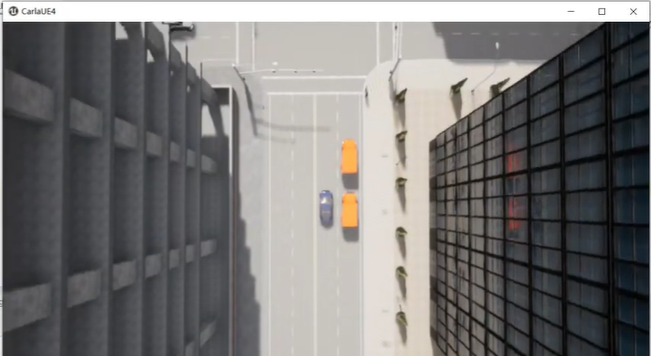
1.Carla停车场场景的搭建,我们可以利用现成的API,在Town05搭建停车场。具体来说,我们可以在目标停车位两边放静态车辆,再难点就是在周围放随机运动的行人,来模拟停车场的动态环境。2.可以搭建更困难的场景,让传统的SAC几乎失效(到达不了终点),然后自己提出的方法可以到达终点。2.深度强化学习的训练,我们可以选用常用的SAC算法进行训练,训练的效果可以如视频所示。SAC的输入观测是后视角的
本篇博客讲数学基础部分中 Frenet 坐标系和笛卡坐标系之间的坐标转换,即直角坐标和自然坐标的转换。 本节内容如果只应用,难度其实还好,但如果想真彻底理解它是怎么来,难度非常高。需要非常熟悉微积分以及向量微积分。
在此推荐另一篇文章【自动驾驶决策规划】POMDP之Introduction“The future is independent of the past given the present”未来状态的概率分布只与当前状态有关,而与过去状态无关。定义:性质:Pss′\boldsymbol{P}_{ss^{\prime}}Pss′为从状态sss转移到状态s′s's′的概率,又称一步状态转移概率。P\b
本篇博客深入探讨了自动驾驶决策规划算法中的一个关键数学概念——五次多项式。内容整理自 B站知名up主 忠厚老实的老王的视频。在车辆的决策规划中,舒适性的衡量标准是跃度(Jerk),它与加速度的三阶导数相关。为了使Jerk的绝对值最小,我们需要找到一种函数形式,使得加速度的变化尽可能平缓。这引出了最小化Jerk平方积分的数学问题。接着,探讨了二次或二次以下函数在最小化Jerk平方积分中的作用,以及实
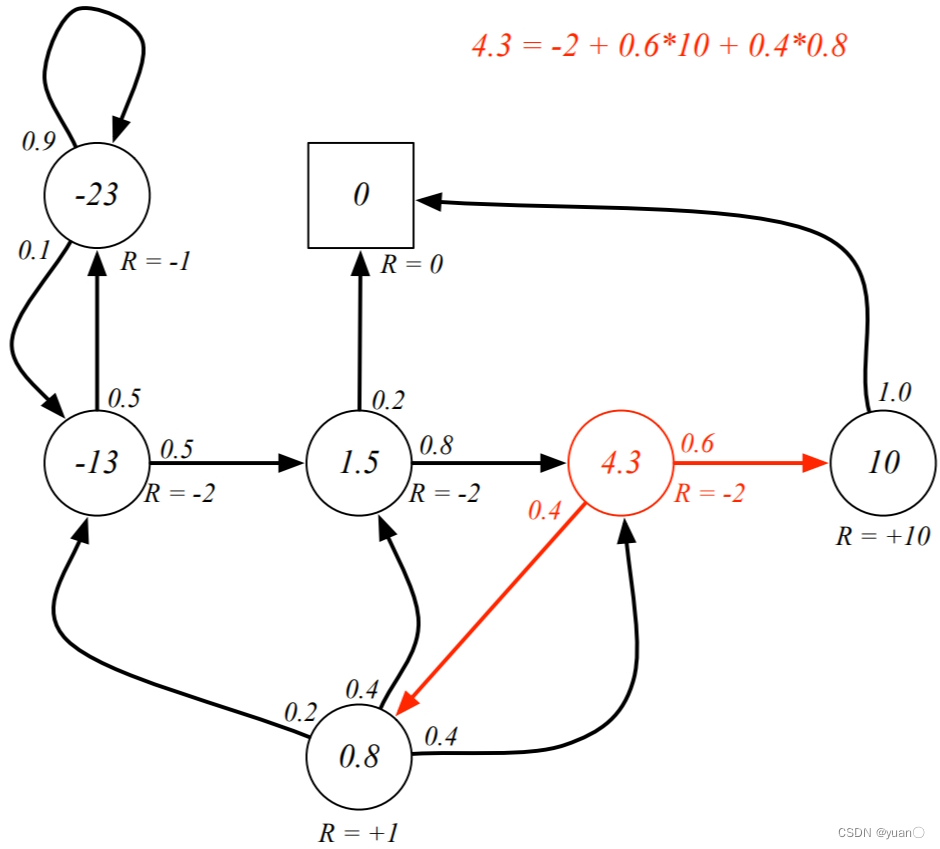
决策大模型作为新一代人工智能的底层技术,能够赋能智能体(AI agent)在数字世界做出有效决策,也能助力具身机器人在物理世界实现有效决策。它不仅推动了智能体在复杂环境中的自主决策能力,还为多领域应用提供了新的技术思路。
自动驾驶系统由四大模块组成:感知系统、预测系统、决策规划与控制系统。预测系统负责预测车辆周围交通参与者的未来行为轨迹,包括车辆、行人、骑行者等,其输出为决策规划提供关键输入,直接影响自动驾驶的安全性和平顺性。预测方式分为基于状态预测(物理运动模型和机器学习模型)和基于车道序列预测(概率图模型和深度学习模型)。决策规划层则根据预测结果生成安全、合规、舒适的行驶路径,确保自动驾驶车辆高效运行。控制系统
目前大模型,AI正火热,GPt,DeepSeek等等,曾一度火爆全网,废话少说,大家赶紧学着用起来。
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实践与【Apollo学习笔记】——Planning模块讲到……Stage::Process的函数会依次调用task_list中的TASK,本文将会继续以LaneFollow为例依次介绍其中的TASK部分究竟做了哪些工作。由于个人能力所限,文章可能有纰漏的地方,还请批评斧正。在配置文件中,我们可以看到LaneFollow所需要执行的所有
这篇文章详细介绍一下最新的ROS给出的DWA算法的结构,以及各个重要的cost function的含义,帮助你们理解DWA算法的构成。
本文介绍了决策规划框架,解耦和耦合策略
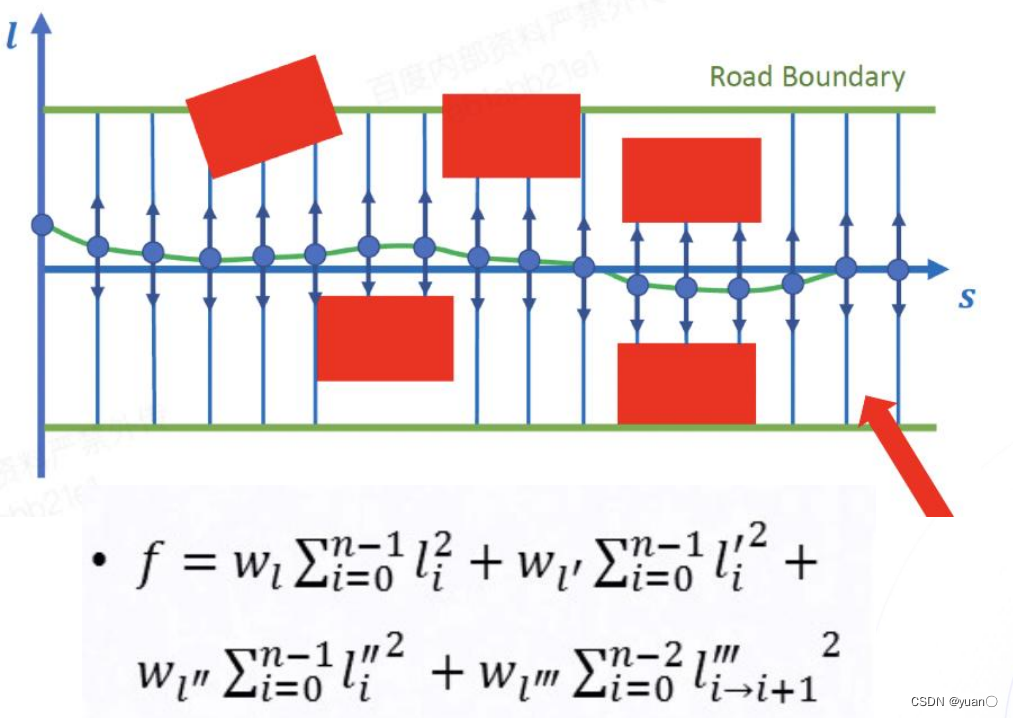
在自动驾驶决策规划算法中,参考线是解决导航路径过长且不平滑问题的关键。通过截取全局路径中的一段较短路径并进行平滑处理,简化了障碍物投影和匹配点的确定,使得规划算法能够在较小的范围内搜索最优路径。参考线的优点在于,较短的参考线投影更容易确定,且经过平滑处理后,路径更加平滑。参考线平滑算法通过代价函数来优化,代价函数包含了与原路径点相似代价、平滑代价和紧凑代价。通过将代价函数写成二次规划的形式,可以求
决策规划
——决策规划
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 全球具身智能开发者社区
全球具身智能开发者社区

 魔乐社区
魔乐社区






 葡萄城开发者空间
葡萄城开发者空间
 2048 AI社区
2048 AI社区



 北京城市开发者社区
北京城市开发者社区

