- @weixin_39735688
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
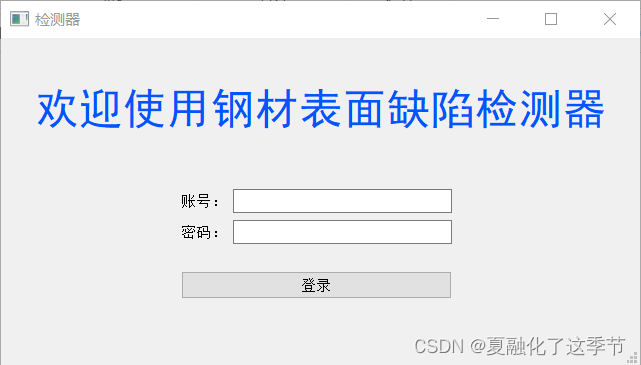
钢材缺陷检测-基于yolov5算法和qt界面
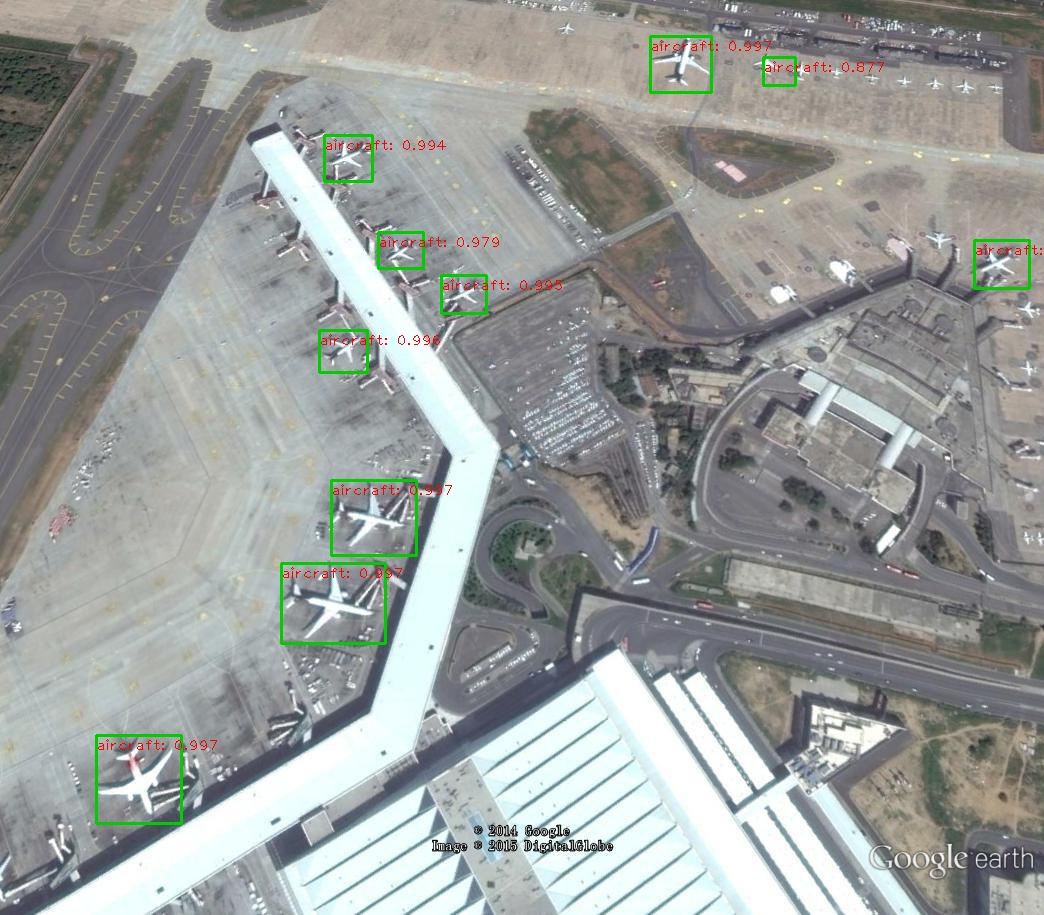
目前目标检测算法有很多,流行的就有faster-rnn和yolov,本文使用了faster-rnn框架进行训练,效果还不错,准确率,当然也可以使用更高版本的Yolov进行实战。

使用Faster-RCNN进行训练,这是一个二分类的问题,也就是检测是否存在交通标志,而未进行分类。今天我们一起学习利用flask框架将深度学习检测封装为一个界面系统。1.该界面适合所有检测目标,只需要更改界面的后台检测算法即可。2.目前算法仅仅是交通标志的检测,检测分类的话后续会进行更新。使用Flask框架进行网页的搭建。这里选用fcnet,也可选择vgg进行训练。

参考原始代码:https://github.com/tensorflow/models/tree/master/research我用的是1.x的版本所以环境必须有gpu版本的tensorflow,训练才快。(1)原始数据集必须有jpg图片和对应的xml文件。(4)以上操作都是对训练数据集,验证数据集同时操作:因为项目只有一种类别,所以长这样。若有多个则继续往后加。我这里选择ssd_mobilene

网上大部分是关于tensorflow,使用pytorch的比较少,本文也在之前大佬写的的基础上,进行了数据集的完善,和代码的优化,效果可比之前好一点。
本社区交流是为了帮助大家快速入门大模型增强强化学习应用,以实战项目为驱动进行学习,并设立有学习交流社区群,购买后即可加入,一起探讨科研问题。先说一下,下单前可以尽情了解清楚是否适合自己(包括能否跑carla,具体的效果,想学习的内容,学习目的等等),仔细看博客的介绍和交流清楚问题。下单后不给予退款处理!!!,如果下单进群后还想以自己不适合用等借口要求退款的,请滚开不要浪费各自的时间。社区群是用来学

这个deepmdp的目的,就是解决Carla_DRL中,sac等算法不加vae直接输入原始图像无法训练出很好的拟合效果的问题,所以加了一个deepmdp+sac算法的工程,这个工程可以用来跑顶会论文的baseline。单进程的RL的训练版本之一,目前主要包括三个场景,点到点导航,鬼探头,急刹车,其他场景都可以自行创建。目前Carla_DRL有三个版本,v3.0是最新的,点进去可以看到代码,下载或者

快速入门学习自动驾驶决策端到端深度强化学习Carla实战项目本课程是为了帮助大家快速入门强化学习和学会应用深度强化学习进行单智能体的算法开发。鉴于网上有许多开源的强化学习理论基础的视频,而且许多项目都是基于gym游戏进行开发的简单项目,并未涉及使用前沿的carla环境等自动驾驶仿真环境进行强化学习开发与讲解,所以本课程着重从模态化的单智能体的深度强化学习入手,以实战项目为驱动进行学习,并设立有学习

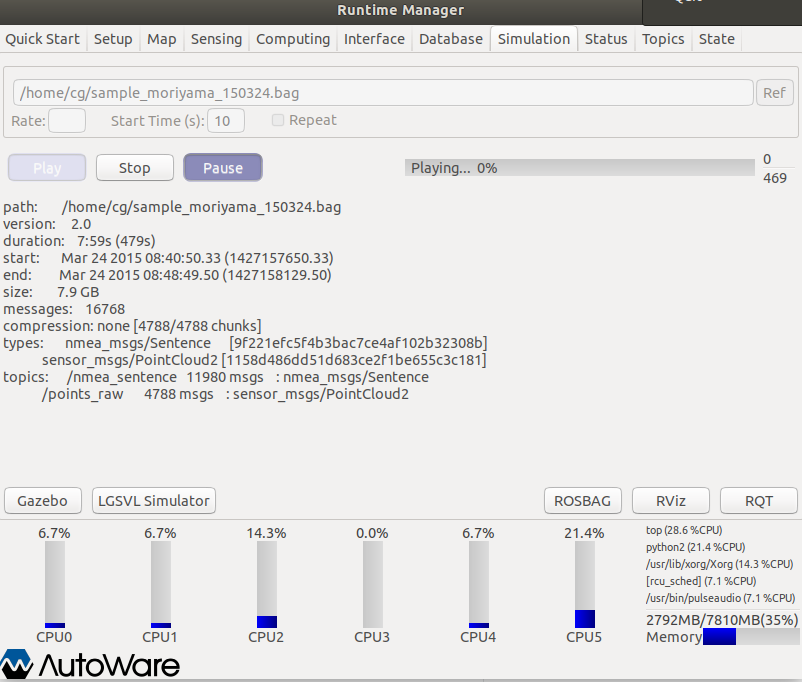
一定要注意解压文件是在.autoware/路径下的,不然后续运行launch文件时,会提示找不到文件:.autoware/data/tf/tf.launch:修改run脚本,改为正确source路径为了防止警告,找到‘state_publisher’并用‘robot_state_publisher’去代替它。
代码:https://github.com/jwyang/faster-rcnn.pytorch/tree/pytorch-1.0。