登录社区云,与社区用户共同成长
邀请您加入社区
查看方式数据类型场景普通表单或 URL 查询参数动态路由(如/edit/:id[]byte原始 JSON 请求体string单个字段调试(Evaluate 表达式)通过合理使用 Goland 断点和查看控制器中c的变量结构,你可以快速定位字段获取错误、前端数据缺失、类型转换失败等问题,是提升开发效率的重要技巧。在IDE 中 断点到任意 c 位置,使用求值表达式即可 求出表单中所有提交的值。
std::weak_ptr是shared_ptr的伴侣指针,专门用于解决shared_ptr可能产生的循环引用问题。对于需要多个智能指针共同管理同一对象生命周期的场景,C++提供了std::shared_ptr。unique_ptr几乎可以零开销地替代裸指针,是现代C++中首选的智能指针类型,尤其适用于资源仅在单一作用域或单一对象内使用的场景。为了从根本上解决这些问题,现代C++标准库引入了智能指
DeepSeek Communities: Nurturing Connections in the Digital AgeIn today's rapidly evolving digital landscape, the concept of community has taken on a new dimension. DeepSeek Communities represent a vib
把所有点位两两之间的路径都算出来后,咱们就得到了一张路径代价矩阵——这相当于给后续的蚁群算法准备了城市距离表。厨房飘着咖喱香,送餐机器人小R盯着屏幕上闪烁的八个取餐点坐标,触角天线微微颤动——今天的路径规划挑战开始了。总路径长度校验时要注意转角处的距离计算——有些时候直接相加会比实际走出来的路线短,这时候需要重新跑一遍完整路径的A。2,蚁群算法依据两点之间路径长度,规划多个目标点的先后到达顺序;1
CXL 3.0的Memory Pooling技术通过硬件级缓存池化和Token一致性协议,为Chiplet架构提供了低延迟、高带宽的全局内存视图。随着AMD Instinct MI300、Intel Ponte Vecchio等CXL-enabled芯片的落地,这场围绕缓存的“战争”已进入白热化阶段。随着摩尔定律逐渐失效,Chiplet异构计算架构凭借其灵活性、可扩展性和成本优势成为高性能计算(H
本博客github地址,欢迎大家star~前言最近在选择一门后端语言学习,之前线上付费学过几个月时间的python,但是觉得python太轻了,当爬虫或者自动化运维还不错,用它做web开发不太合适。java又感觉太重,各种开发框架层出不穷,而且java已经太成熟,学它没有任何优势。选择go语言,是因为个人觉得,以太坊和超级账本底层都是用的go语言写的,go语言并发处理能力很强,未来随着数据...
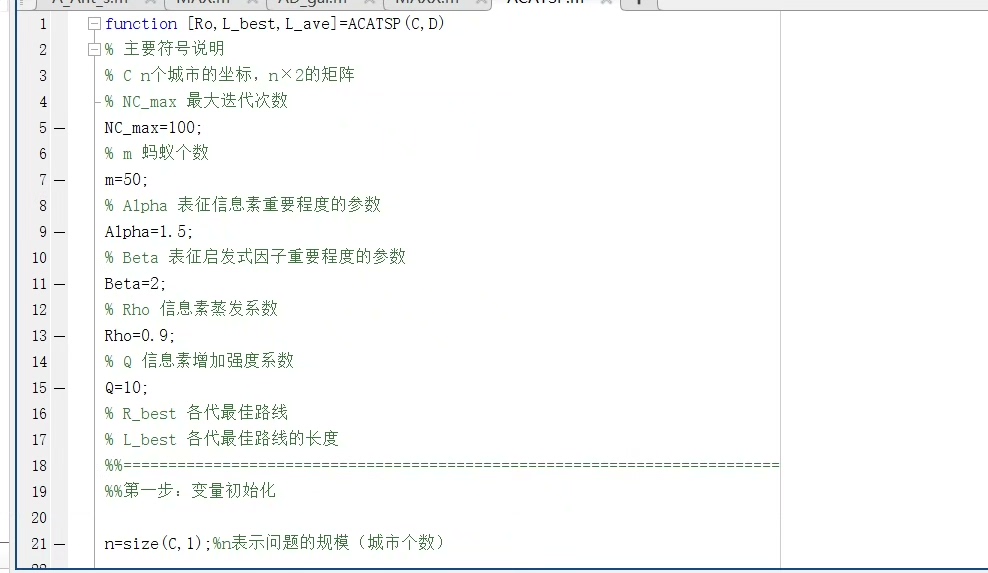
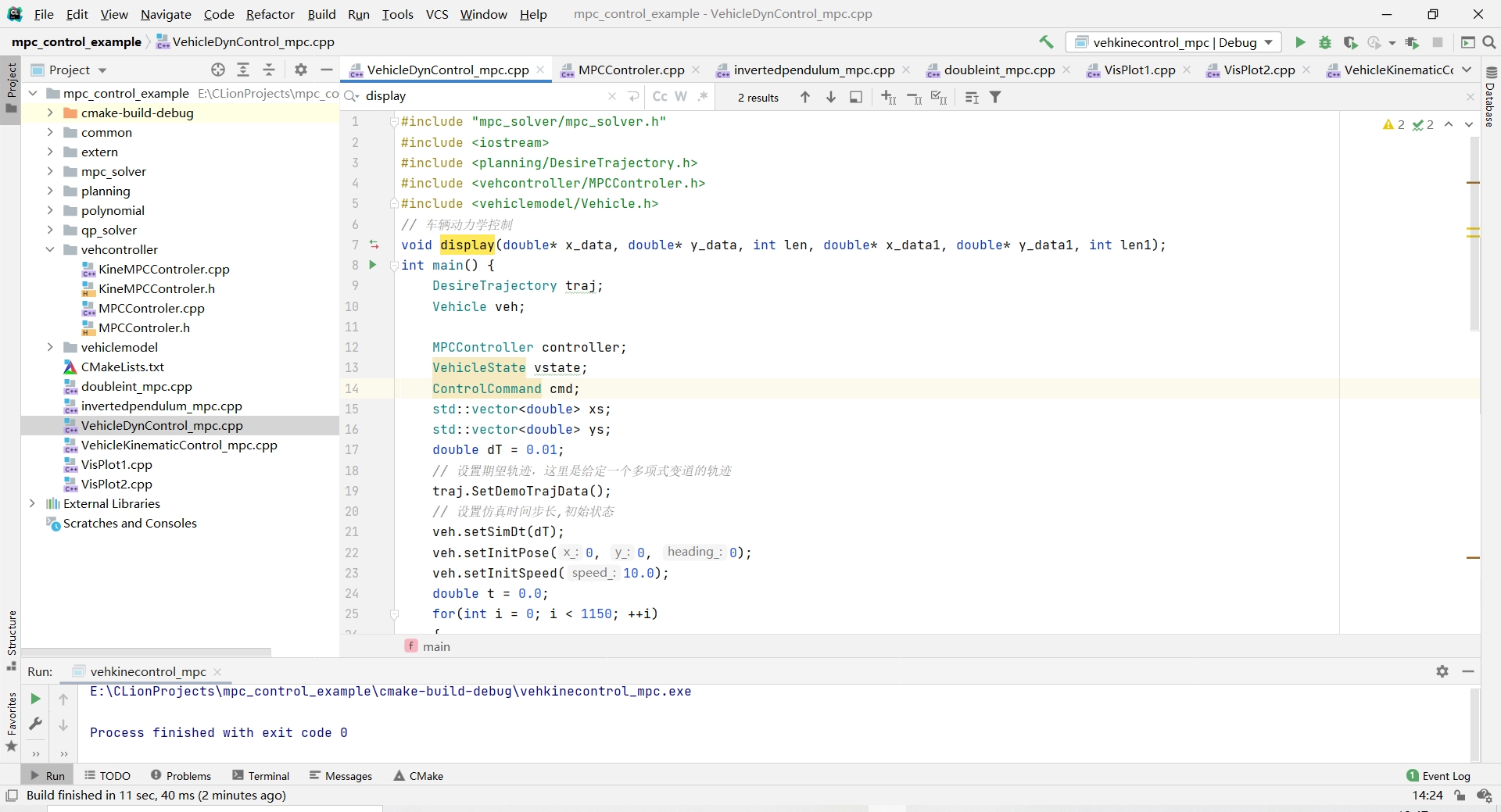
mpc模型预测控制从原理到代码实现mpc模型预测控制详细原理推导matlab和c++两种编程实现四个实际控制工程案例:双积分控制系统倒立摆控制系统车辆运动学跟踪控制系统车辆动力学跟踪控制系统包含上述所有的文档和代码。模型预测控制(Model Predictive Control, MPC)是一种先进的控制策略,它通过求解有限时域内的最优控制问题来实现系统的控制目标。本文基于MATLAB实现的多个M
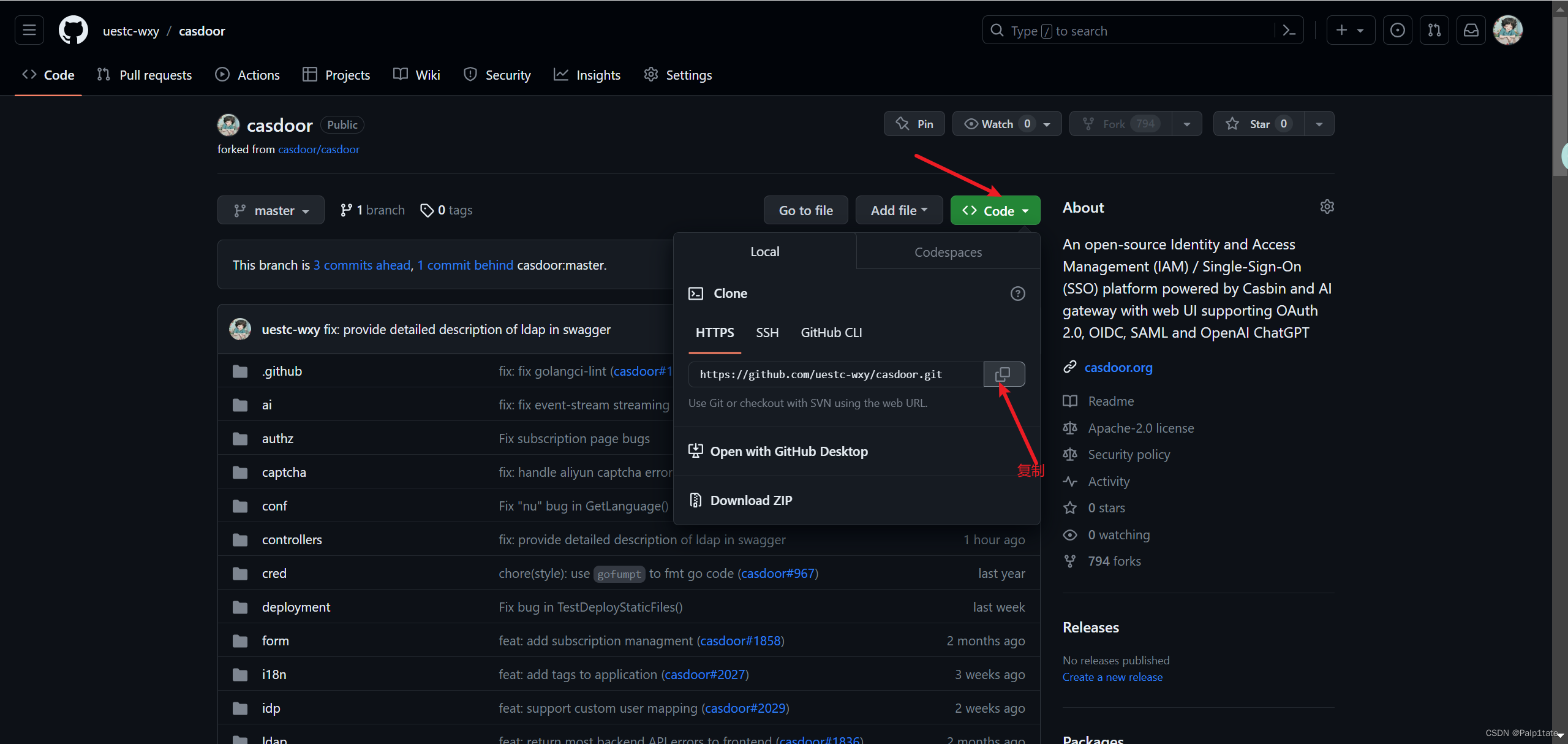
PR(Pull Request) 即`拉取请求`,是 GitHub 上进行协同开发的一种非常常用的方式。它的基本流程是:1. 开发者fork一个开源项目的代码库,将其克隆到本地。2. 在本地对代码进行修改、添加新功能等。3. 将本地修改后的代码push到开发者自己的代码库中。4. 在开源项目的代码库中,发起一个pull request,请求项目维护者将开发者的代码merge到项目主代码库中。5.
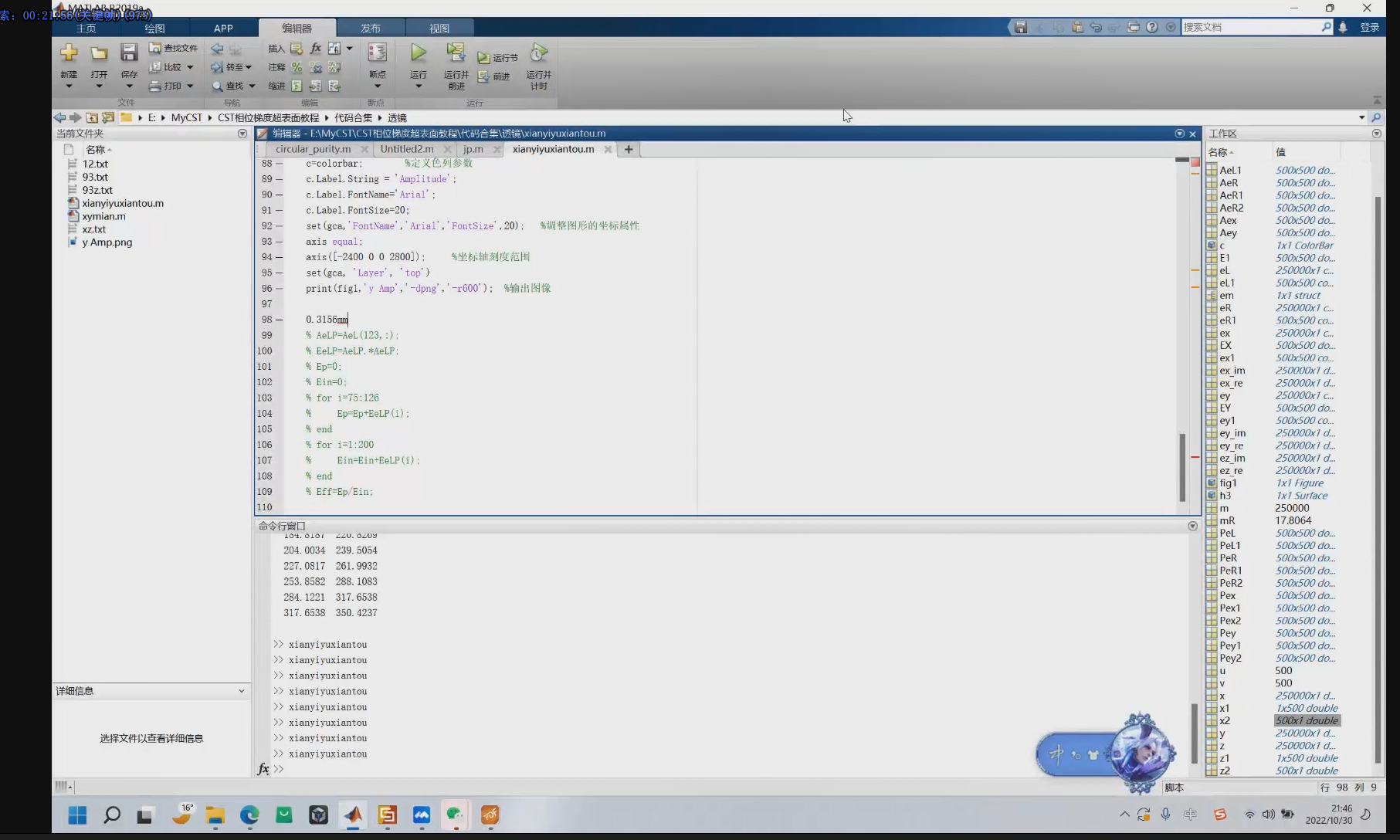
CST与Matlab联合仿真,CST仿真模型联合建模代码,相位计算代码,电场导出画图代码,以超透镜为案例有讲解视频,视频讲解,代码,文档,透镜,有联合建模代码,相位计算代码。电场观测代码在电磁学与光学领域的研究中,CST 与 Matlab 的联合仿真为我们提供了强大的分析工具。今天咱们就以超透镜为案例,来深入探讨这一联合仿真的奇妙之旅。
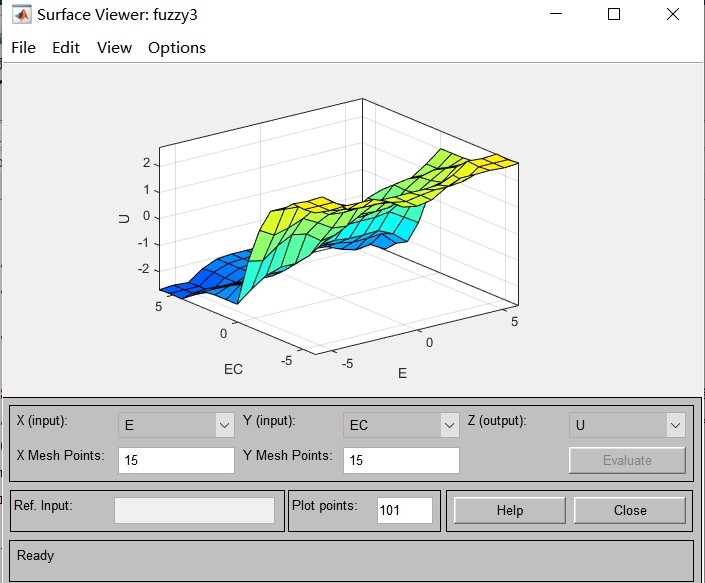
通过以上三个模型的仿真研究,我对悬架系统的控制策略有了更深入的理解。PID控制简单易用,模糊控制适合非线性系统,而天棚控制则在半主动悬架中表现出色。每种控制策略都有其优缺点,选择合适的控制策略需要根据具体应用场景来决定。未来,我计划进一步研究结合机器学习的悬架控制策略,比如深度强化学习,看看能否在复杂路况下实现更优的控制效果。同时,我也希望能在实际车辆上进行验证,看看仿真结果是否能在真实环境中复现
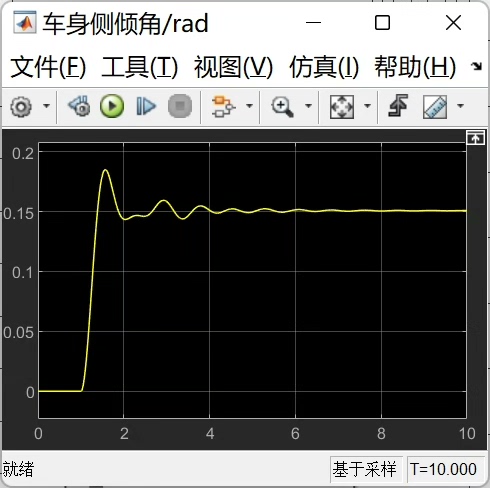
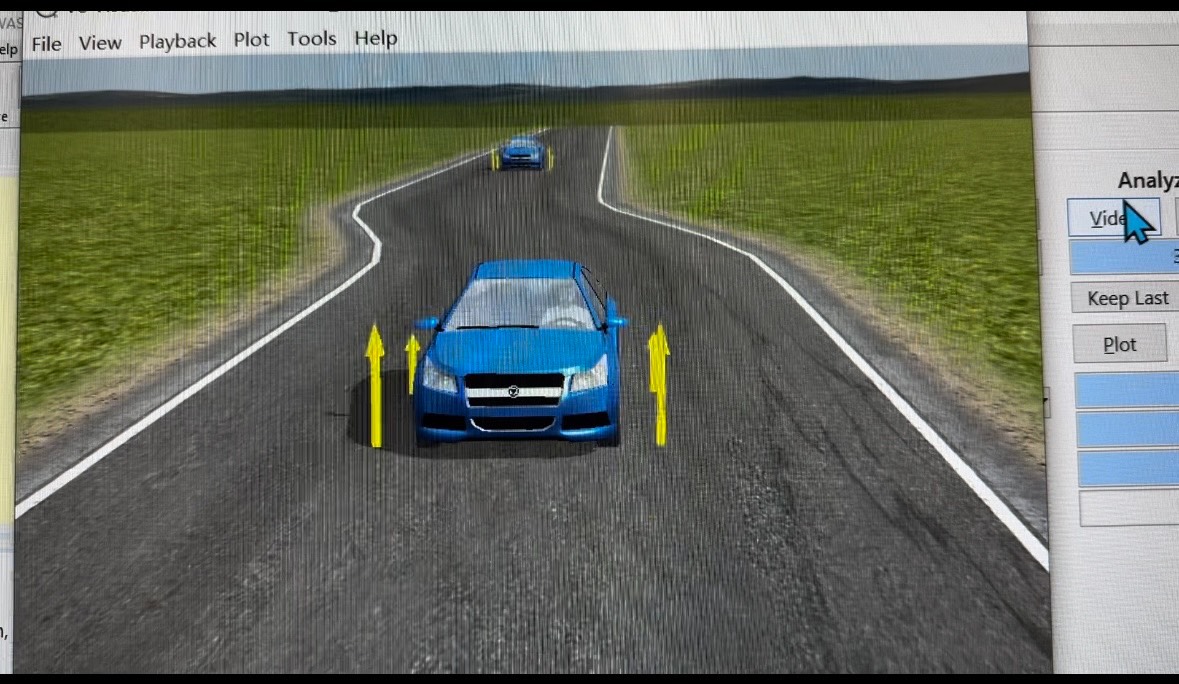
汽车动力学仿真工程师的日常,总离不开和自由度较劲。十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。包含模块:转向系统,整车车身系统,悬架系统,魔术轮胎,车轮系统
最后说点真心话:二阶模型在多数BMS场景够用了,但千万别迷信模型精度。先看模型结构:一个理想电压源(开路电压)串上欧姆电阻,后面接着两个RC并联网络。优化算法可能会在局部最优打转,这时候加些物理约束很重要,比如所有电阻电容必须为正数。两段代码对比着看很有意思:前者的odeint用了自适应步长,适合离线仿真;这段代码用了SciPy的微分方程求解器,但实际嵌入式系统里可能用不起这么高级的库。参数辨识才
pfc5.0类岩石材料在进行单轴压缩,双轴压缩、直接剪切、巴西劈裂试验时,数值模拟岩石颗粒各个角度的平均接触力,角度输出代码及后处理绘制接触力的极坐标等高线图具体内容见图片文件夹,有具体教程,很清楚不管是单轴压缩、双轴压缩、直接剪切还是巴西劈裂,我们做岩石细观数值模拟的时候,最终都绕不开接触力的分析——毕竟宏观的破坏、强度这些,本质都是颗粒之间的接触力攒出来的。尤其是想画接触力的极坐标等高线图,看
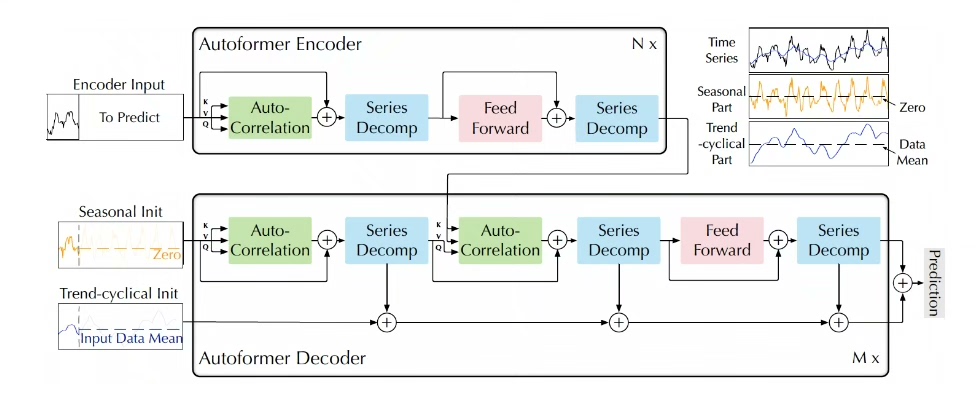
自适应 Transformer 结构: 与传统的固定结构的 Transformer 不同,Autoformer 的结构可以根据输入数据和任务的不同而自适应地进行调整,以获得更好的性能。自适应 Transformer 结构: 与传统的固定结构的 Transformer 不同,Autoformer 的结构可以根据输入数据和任务的不同而自适应地进行调整,以获得更好的性能。高效性能: Autoformer
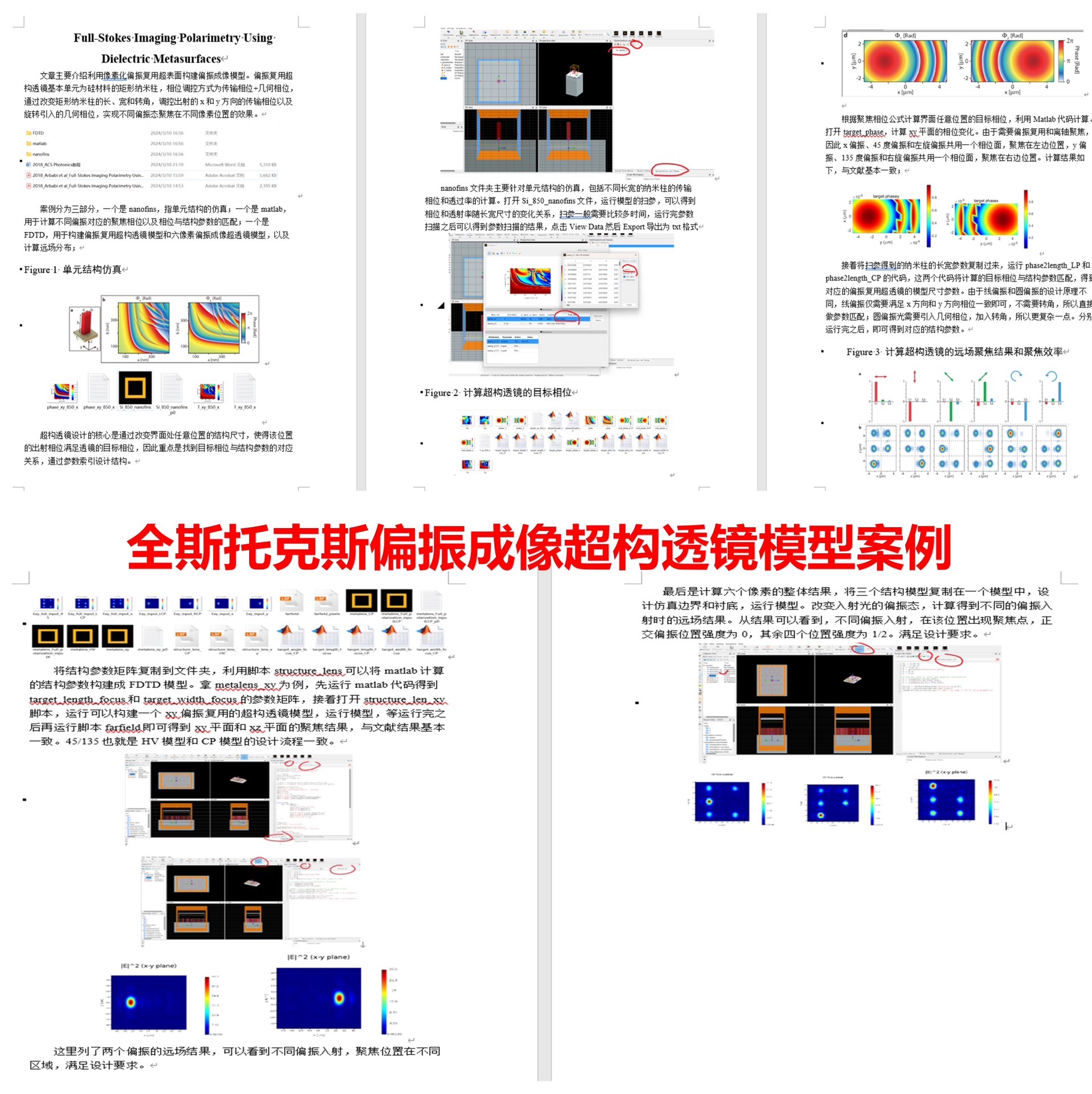
案例内容:主要包括硅纳米柱的单元结构仿真、相位和透射率的参数化扫描,偏振复用超构透镜的偏振解耦合相位计算代码,三组正交偏振成像的超构透镜模型,和对应的远场电场分布计算,以及六像素全斯托克斯超透镜的模型和远场计算结果。案例内容:主要包括硅纳米柱的单元结构仿真、相位和透射率的参数化扫描,偏振复用超构透镜的偏振解耦合相位计算代码,三组正交偏振成像的超构透镜模型,和对应的远场电场分布计算,以及六像素全斯托
车辆紧急防避撞AEB控制该模型包括,基于Carsim及Matlab/simulink的联合仿真控制模型(1)驾驶员制动模型来模拟制动过程;(2)实现以模糊控制实现期望减速度的计算,(3)纵向发动机逆动力学模型实时求解期望节气门开度,(4)驱动与制动的切换控制,以及制动压力与减速度之间的关系计算,(5)车辆动力学模型实现实际的风阻和滚动阻力的计算以及节气门开度计算等,【资料】提供详细的建模过程,模型
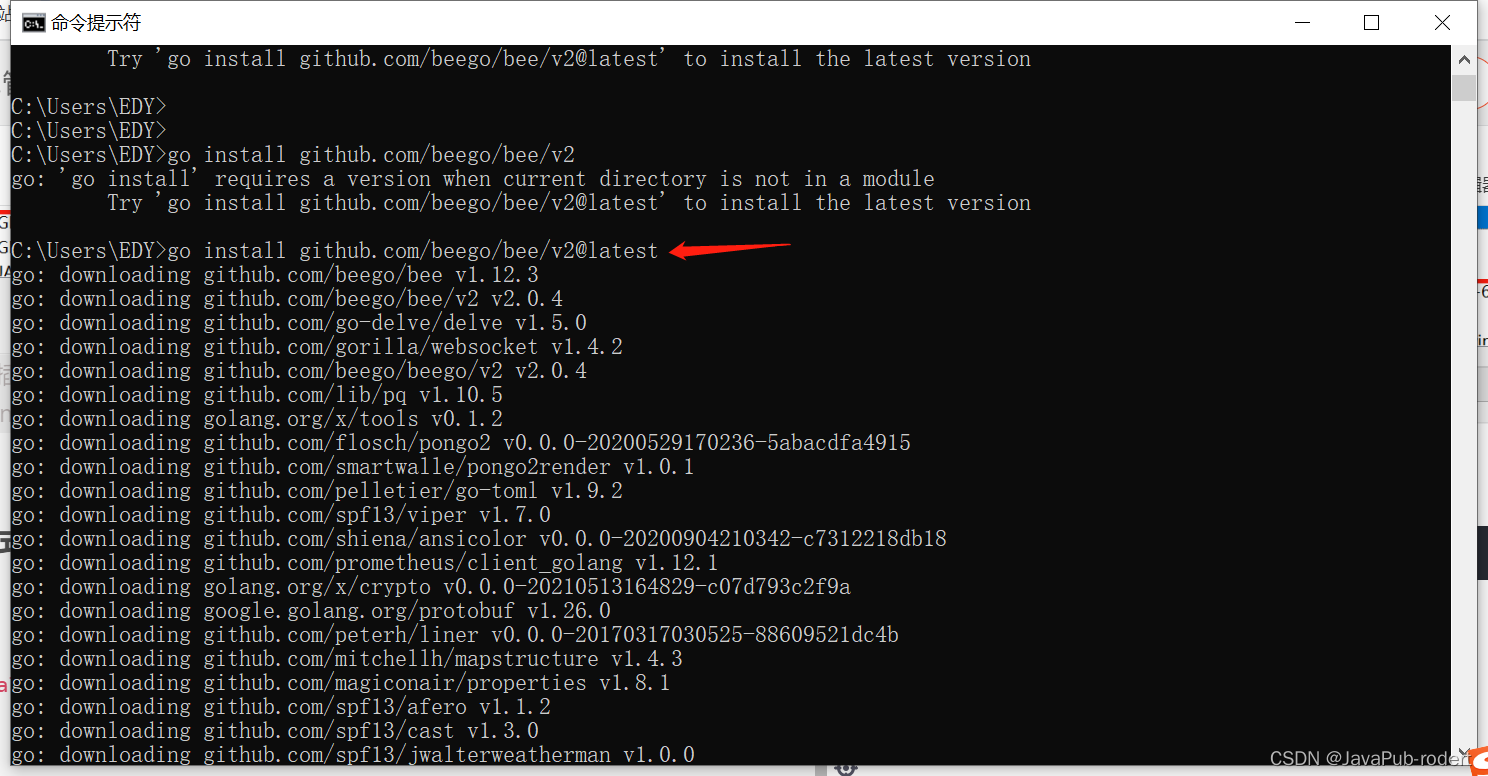
如果bee.exe没有生成,则手动编译再复制到GOPATH/bin中,这里我是没有通过这种方式生成bee.exe的,我是采用的另一种方式,手动编译生成bee.exe,然后复制到GOPATH/bin。进入GOPATH/pkg\mod/github.com/beego/bee/v2@v2.1.0下,执行go build。注:GOROOT是go的安装目录,GOPATH是go的指定工作目录,GOBIN是工
beego 2.0版本的一个新特性是能够在日志发送到首选适配器之前对其应用自定义格式。
在结束之际,我想重申的是,学习并非如攀登险峻高峰,而是如滴水穿石般的持久累积。尤其当我们步入工作岗位之后,持之以恒的学习变得愈发不易,如同在茫茫大海中独自划舟,稍有松懈便可能被巨浪吞噬。然而,对于我们程序员而言,学习是生存之本,是我们在激烈市场竞争中立于不败之地的关键。一旦停止学习,我们便如同逆水行舟,不进则退,终将被时代的洪流所淘汰。因此,不断汲取新知识,不仅是对自己的提升,更是对自己的一份珍贵
一款 Go 语言基于Beego、Layui、MySQL等框架精心打造的一款模块化、高性能、企业级的敏捷开发框架,本着简化开发、提升开发效率的初衷触发,框架自研了一套个性化的组件,实现了可插拔的组件式开发方式:单图上传、多图上传、下拉选择、开关按钮、单选按钮、多选按钮、图片裁剪等等一系列个性化、轻量级的组件,是一款真正意义上实现组件化开发的敏捷开发框架。
1. 常见框架1.1 框架排名Gin31k [Lite]Beego22kIris16kEcho15k [Lite]Revel11kMartini10k [×]buffalo5k[Lite]1.2 框架特性Gin:Gin 是一个用 Go (Golang) 编写的 web 框架。...
在安装前先搞清楚俩点beege和bee是两个概念。beego是框架,bee是工具,是命令。在安装Beego前,先确认是否将$GOPATH/bin写入GO环境中。
注意:1、需在项目app.conf中添加以下设置,否则beego获取ajax的json数据为空;copyrequestbody = true2、js中定义传递的json数据时,键要与model中定于的结构体保持一致,否则获取的传递数据为空;根据ajax中设定的json数据组,在beego中定义该结构体,例如:#js代码email = $('#email').val();mobile...
项目为学习golang的一个新手项目,功能包括短信登陆、注册、添加好友、修改备注、创建群组、加入群组、好友即时聊天、视频聊天、群组聊天、多人视频等功能前端:vue、element-ui、vue-socket、webrtc后端:beego、mysql、socket.io、swagger服务器:nginx、STUN/TURN穿透前端项目地址:https://github.com/microcosm19
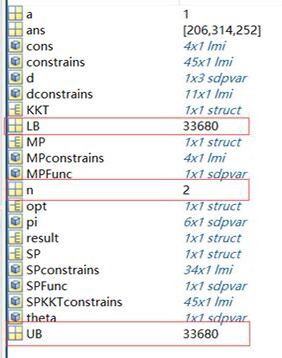
接下来,程序进入主问题求解的过程。其中,MPconstrains是一个关于MP.Y和MP.Z的约束,SPFunc是一个关于MP、SP和d的函数,SPconstrains是一个关于SP.X的约束,dconstrains是一个关于d的约束。其中,MPconstrains是一个关于MP.Y和MP.Z的约束,SPFunc是一个关于MP、SP和d的函数,SPconstrains是一个关于SP.X的约束,dc
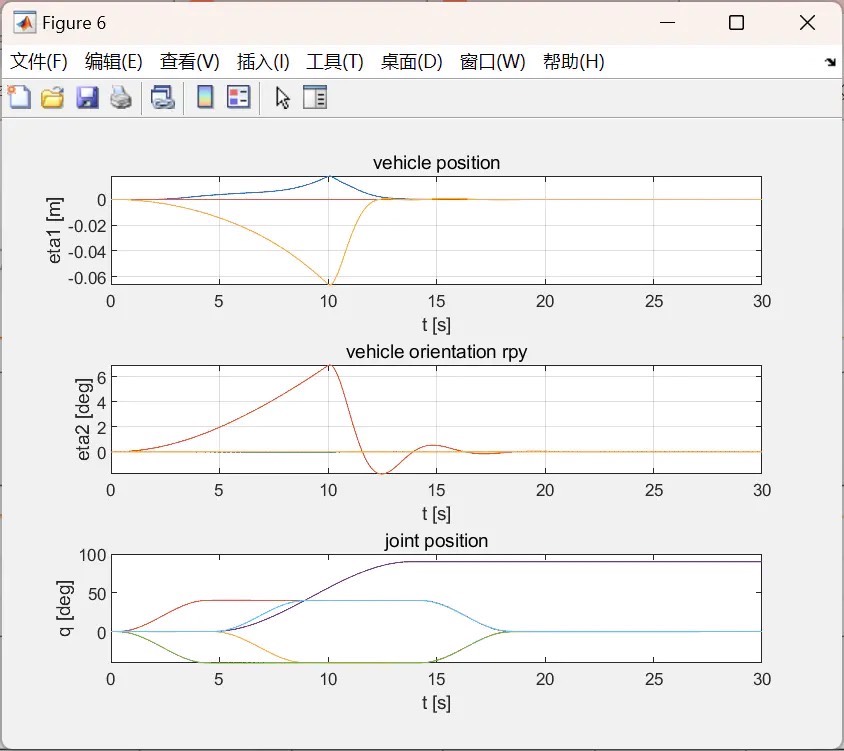
水下机器人双机械手系统动态建模与控制matlab仿真水下机器人-机械手系统(Underwater vehicle-manipulator systems, UVMS)可以完成除观测之外的水下采样、抓取、操作等任务,在海洋科学考察、海洋工程等领域得到广泛应用。
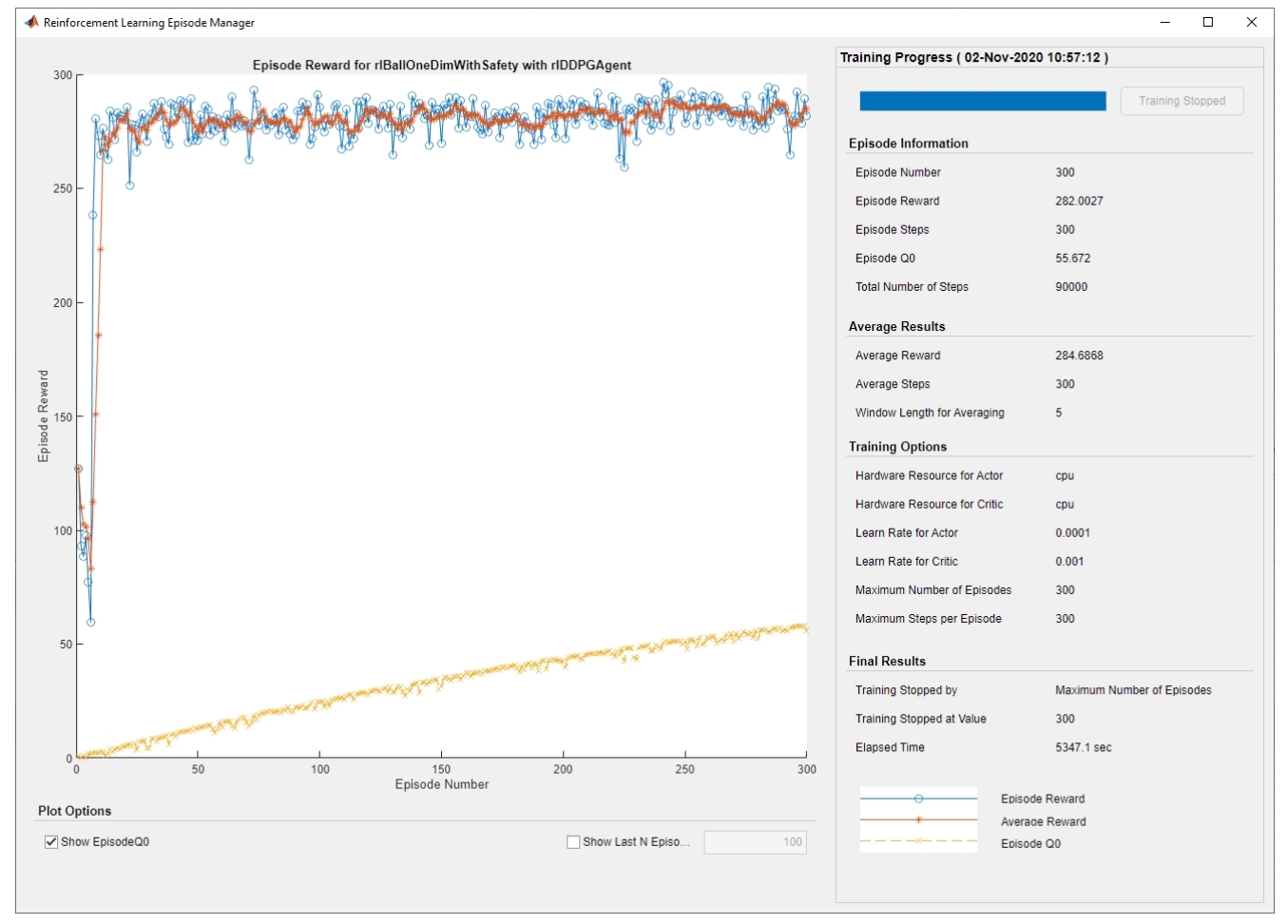
MATLAB代码:安全 强化学习关键词:safe RL仿真平台:MATLAB主要内容:此代码展示了如何使用 Constraint Enforcement 块来训练强化学习 (RL) 代理。此块计算最接近受约束和动作边界的代理输出的动作的修改控制动作。训练强化学习代理需要 Reinforcement Learning Toolbox。在此示例中,代理的目标是使绿球尽可能靠近红球不断变化的目标位置。
在深度学习的持续学习(Continual Learning, CL)场景中,模型需要在非独立同分布(non-i.i.d.)的任务序列中持续吸收新知识,同时避免对已学习任务的性能退化。设模型参数为θ∈Rd,在任务序列{T1,T2,...,Tn}中,模型通过最小化损失函数Lt(θ)学习新任务Tt。构建任务图G=(V,E),节点为任务Ti,边权重wij反映任务间的参数共享程度。技术,解析其
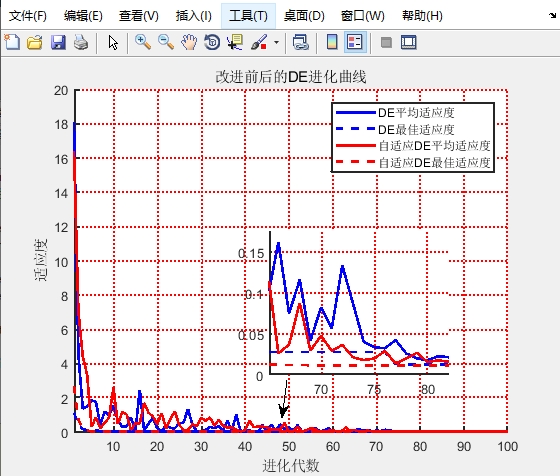
差分进化算法优化BP神经网络,支持向量机SVM/SVR,最小二乘支持向量机LSSVM,极限学习机ELM,预测与分类。在数据驱动的时代,预测与分类问题无处不在,从金融市场趋势预判到医疗影像疾病诊断,准确的预测与分类模型至关重要。今天,咱们就一起深入探讨几种强大的算法:差分进化算法优化BP神经网络,支持向量机(SVM/SVR),最小二乘支持向量机(LSSVM)以及极限学习机(ELM)。
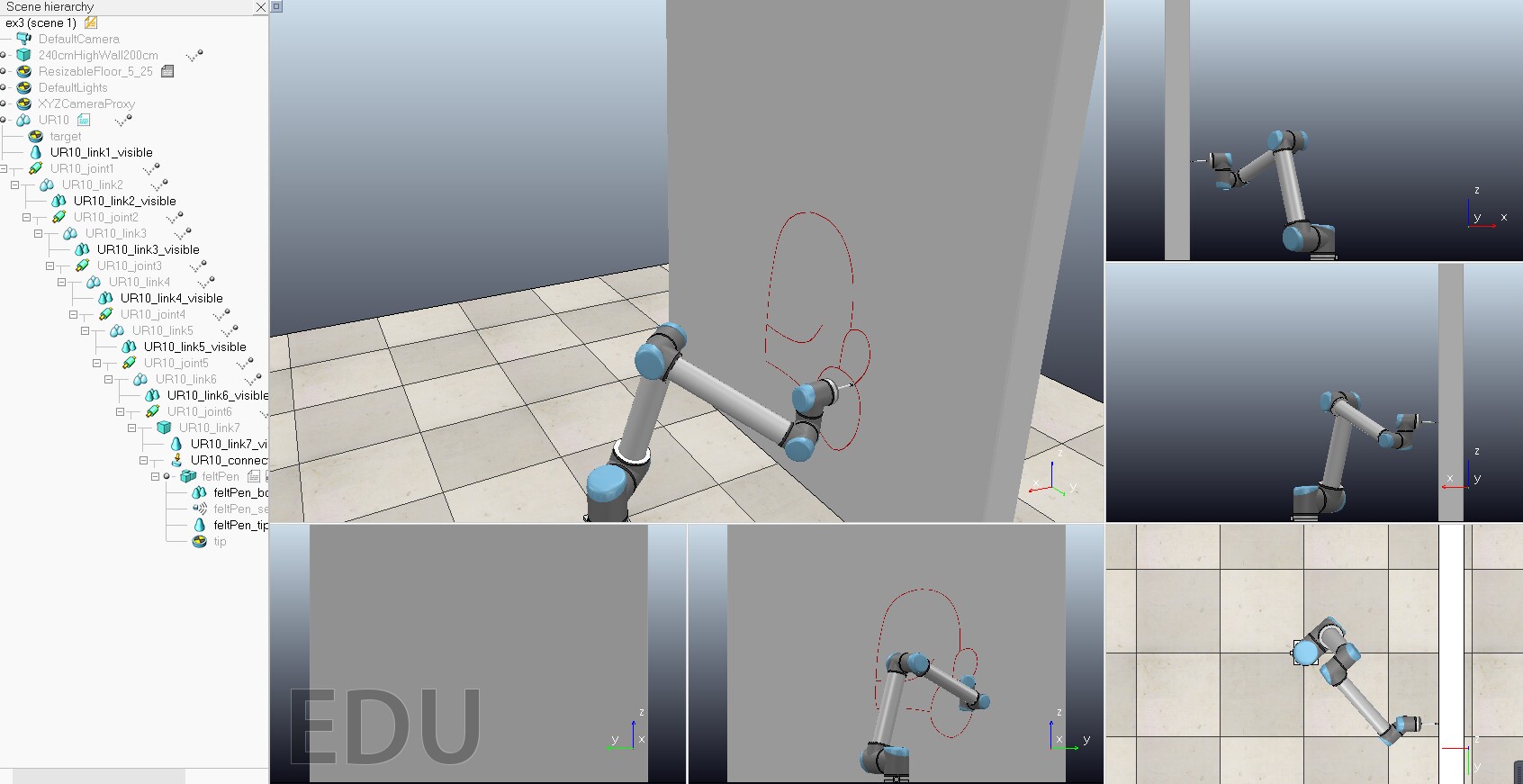
墙面绘图轨迹控制与物体码垛运动控制。系统通过MATLAB与CoppeliaSim的远程API通信,完成轨迹规划、运动控制、状态反馈等全流程自动化操作,适用于机器人运动控制算法验证、工业场景仿真预演等场景。系统核心优势在于模块化设计,将轨迹规划、通信交互、运动执行等功能拆分为独立模块,支持快速适配不同类型机械臂模型与任务场景;
创建项目文件夹mkdir go_projectcd go_project初始化项目并替换Bee源为什么要替换呢?下面是作者的原话you’ll need to clone it over the original repo (that is best anyways, so you don’t have to refactor any code when this gets rele...
线程的生命周期包括新建、就绪、运行、阻塞和死亡五个状态,其中同步阻塞(如wait())、I/O阻塞(如读写操作)、自愿让出(如yield())是常见的阻塞原因。这样配置支持动态伸缩:通常维持10个线程处理常规任务,突发流量可扩展至50个线程,任务队列保存1000个未处理请求。在CSV文件批量处理中,可设计分离读取和解析线程:一个线程负责逐行读取文件流至阻塞队列(BlockingQueue),多个解
该设计已通过200+路由的高并发验证,日均处理千万级消息请求,可作为企业级IM系统路由层架构范本。核心优势在于清晰的模块边界定义和可扩展的过滤器机制,特别适合需要深度定制微信生态功能的场景。:完整项目需结合微信私有协议SDK实现,路由层作为对外暴露的API网关,内部通过RPC调用核心功能模块。的微信机器人核心路由注册文件,展示了如何通过模块化设计实现微信生态的完整功能集成。建议大型项目使用Nam
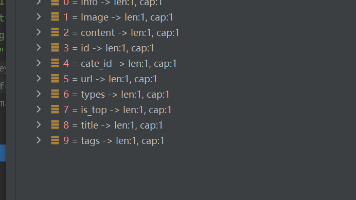
bar.htmlbar: {{ .|lower }}index.html{{ .name }}{{ if .body }}男{{ else }}女{{ end }}{{ range .scores }}{{.}}|{{ end }}<br/>{{ range $index,$value := .scores }}{{$index}} = {{$value}} <br />{
提示:安装bee包后,需要将$GOPATH/bin路径添加到环境变量path中, 否则会提示找不到bee命令,$GOPATH代表的就是你的GOPATH路径,如果你不知道GOPATH路径在哪里,执行下go env命令,会列出所有go相关的环境变量,从里面找到GOPATH路径。这个命令是用来自动化的生成代码的,包含了从数据库一键生成 model,还包含了 scaffold 的,通过这个命令,让大家开发
beego 是一个快速开发 Go 应用的 HTTP 框架,他可以用来快速开发 API、Web 及后端服务等各种应用,是一个 RESTful 的框架,主要设计灵感来源于 tornado、sinatra 和 flask 这三个框架,但是结合了 Go 本身的一些特性(interface、struct 嵌入等)而设计的一个框架。beego 的整体设计架构如下所示:beego 是基于八大独立的模块构建的,是
一个使用golang-beegoWEB框架开发的开源网络验证会员管理系统
开发大致为在centos下搭建编译环境,在windows7下使用goland工具编码,开展beego框架下的restapi开发。centos7的安装在windows7下安装VM虚拟机工具软件去centos7官网下载镜像后在VM中进行安装安装完之后,设置网络能够连接外网,并通过yum安装常用的工具软件设置VM共享文件夹来共享centos和windows之间的文件通信...
测试环境:windows10虚拟机vmware安装的ubuntu14.04内存1g,处理器数量2个,每个处理器核心数量1个测试工具apchebench(ab)python版本:2.7tornado版本4.3go版本1.4beego版本不知道tornado helloworld:import tornado.ioloopimport tornado.we
go+beego+gorilla实现上传&保存图片go语言开发时,遇到网站上传图片的问题,网上的资料很多不能用,最后自己测试通过一种方法。1、routerpackage userimport ("Project/auth""github.com/gorilla/mux")// UserAPIfunc UserAPI(r *mux.Router) {privateR...
没想到它官方的页面没有指出这个,导致怎么也不出现swagger页面。地址如下:http://localhost:8081/swagger/#!必须在route的namespace下面设置swagger路由beego.SetStaticPath("/swagger", "swagger")// @APIVersion 1.0.0// @Title flowte
beego
——beego
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI Agent技术社区
AI Agent技术社区


 DAMO开发者矩阵
DAMO开发者矩阵

 腾讯云开发者社区
腾讯云开发者社区


 AtomGit开源社区
AtomGit开源社区
 openvela
openvela


 魔乐社区
魔乐社区






 2048 AI社区
2048 AI社区
 智能体开发者社区
智能体开发者社区

 HarmonyOS开发者社区
HarmonyOS开发者社区



 华为开发者空间
华为开发者空间


 CSDN学习社区
CSDN学习社区

