- @2501_92218442
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文针对野外中草药检测中的小目标漏检、背景干扰等问题,提出基于YOLOv11的改进模型。通过将SPPF替换为AIFI模块降低计算复杂度,采用Dysample增强细节恢复能力,新增小目标检测层并嵌入CBAM注意力机制。实验表明,改进模型mAP@0.5达81.2%,较基线提升2.9%,推理速度266FPS,参数量仅2.80M,有效提升了复杂场景下的检测精度与效率。该研究为野外中草药智能识别提供了可靠技
摘要:本文针对YOLOv8模型在稻田害虫识别中的不足,提出三阶段改进方案:1)采用C2f-Ghost-DynamicConv模块降低参数量;2)用BiFPN替换PANet增强多尺度特征融合;3)嵌入SE通道注意力机制优化特征提取。实验表明改进后模型mAP达97.9%,关键指标显著提升,满足无人机巡检实时需求。研究获国家自然科学基金等项目支持,成果发表于《人工智能与机器人研究》(DOI:10.126

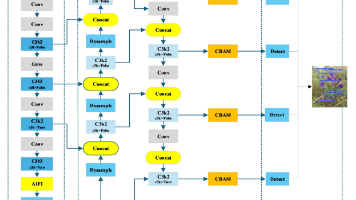
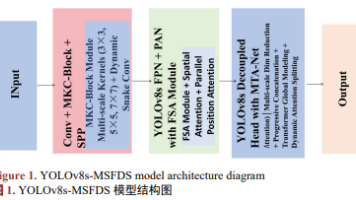
本文提出了一种基于改进YOLOv8s的棉花叶病害检测模型YOLOv8s-MSFDS,通过引入MKC-Block模块和注意力机制优化特征提取能力。研究采用履带式机器人搭载嵌入式系统进行田间检测,在数据集扩充至27,564张图像后,模型准确率达到90.9%,较原YOLOv8提升3.1%。消融实验验证了多尺度通道注意力(MTA-Net)和频域空间注意力(FSA)模块的有效性,显著提升了小目标病害的识别精
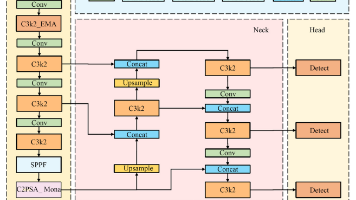
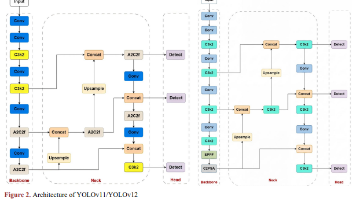
本研究提出改进型YOLO-Apple模型用于解决自然果园中苹果幼果检测难题。针对幼果与叶片颜色相近、尺寸小且易被遮挡的特点,模型在YOLOv11n基础上创新引入C2PSA_Mona模块增强特征提取,并在C3k2模块嵌入EMA注意力机制。实验采用5558张真实场景图像,结果显示YOLO-Apple以6.5GFLOPs计算量和2.6M参数量实现mAP@0.5达84.4%,综合性能优于YOLOv8n等主
摘要:本研究针对花粉显微图像检测难题,提出两种改进YOLOv8的模型:BiFPN-ATFL通过跨层特征复用增强多尺度检测稳定性,Wavelet-CG-C2f结合小波变换与上下文建模提升复杂背景下的检测性能。基于延安地区6类花粉构建的9120张增强数据集(含1351个标注目标)测试显示,改进模型综合性能优于原YOLOv8,其中Wavelet-CG-C2f对松科花粉检测mAP达98%。研究表明频域特征
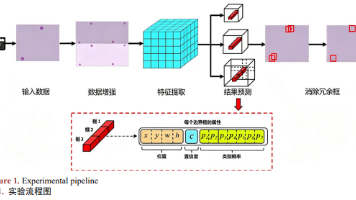
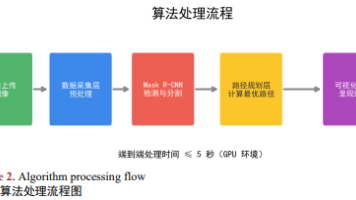
本文设计了一套基于MaskR-CNN的智能系统,用于近海漂浮垃圾检测与清理路径规划。系统采用Roboflow海洋垃圾数据集(11类目标/10,000张图像),通过ResNet-50-FPN实现目标检测(AP53.50%)与实例分割(AP52.05%),并将清理路径建模为非闭合旅行商问题,结合最近邻贪心算法与2-opt优化(200目标耗时181.8ms,路径缩短10.5%)。实验开发了Web/桌面双
本文针对高原牧区牦牛混圈养殖中的自动盘点难题,提出了一种基于改进YOLO模型的智能检测系统。研究构建了18,000张牦牛图像数据集,通过在YOLOv11/v12中集成SAConv、SCConv等模块,实现了mAP50 0.994的检测精度。系统结合K230嵌入式平台,可稳定运行于-40℃~70℃极端环境,较传统方法效率提升10倍以上,为高原畜牧业智能化管理提供了可行方案。实验表明改进模型在目标检测
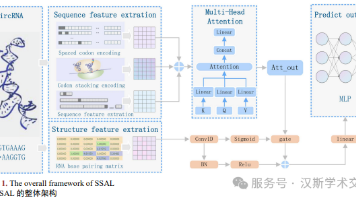
在汉斯出版社《计算生物学》期刊上,有文章提出了一种名为SSAL的深度学习模型,旨在实现大规模数据集上circRNA-RBP相互作用位点的精准预测。
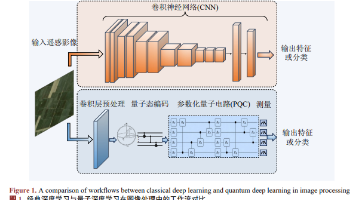
摘要: 本文综述了混合量子-经典计算架构在遥感图像处理中的应用,重点探讨了量子深度学习(QDL)在NISQ时代的潜力与挑战。研究分析了量子数据编码策略(角度、振幅、基态编码)的优劣,并展示了QDL在图像分类、光谱降维及小样本生成等任务中的进展。当前瓶颈包括数据编码效率低、硬件噪声干扰及异构融合不足。未来方向涉及量子迁移学习、张量网络和量子架构搜索(QNAS)等技术的优化,以提升模型抗噪性和特征表征
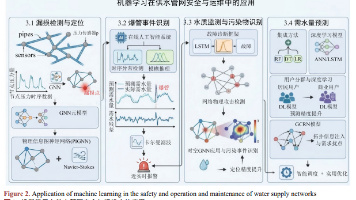
本文系统综述了机器学习在给排水管网领域的研究进展与应用前景。针对传统水力建模方法的局限性,文章从方法层面梳理了传统机器学习、深度学习、图神经网络等技术的优势,重点分析了其在供水管网漏损检测、水质预警和排水管网缺陷识别、内涝预测等场景的应用成果。研究指出当前面临数据稀缺、模型可解释性不足等挑战,并展望了物理信息图神经网络与数字孪生融合等未来发展方向。文章为机器学习技术在城市给排水管网中的深度应用提供