




- @m0_51366201
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
深度置信网络(deef belief network,简称DBN),每层都是一个受限Boltzmann机,整个网络可视为若干个RBM堆叠而得,使用无监督逐层训练时,首先训练第一层,这是关于训练样本的RBM模型,可按标准的RBM训练;ART(Adaptive Resonance Theory,自适应谐振网络理论)是竞争性学习代表,网络由比较层(接收输入样本)、识别层(每个神经元对应一个模式类,神经元

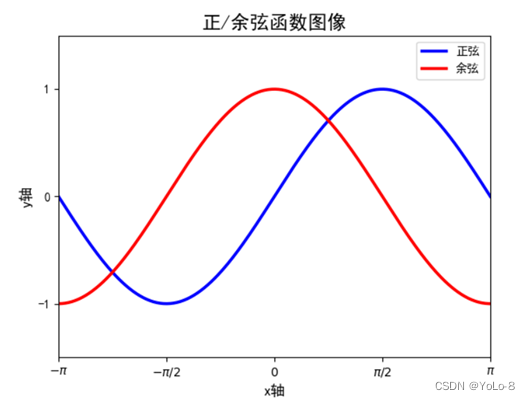
请使用Matplotlib中的折线图工具,绘制正弦和余弦函数图像,其中x的取值范围是[-π,π],效果如图1所示。要求:(1)正弦图像是蓝色曲线,余弦图像是红色曲线,线条宽度为2.5;(2)标题为:“正/余弦函数图像”,字体颜色为黑色,大小为16;(3)横坐标标签为:“x轴”,纵坐标标签为“y轴”,字体大小为12。
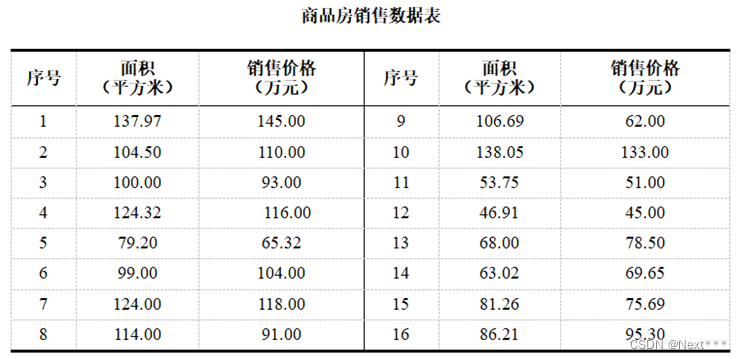
(1)下载波士顿数据集,读取全部506条数据,放在NumPy数组x、y中(x:属性,y:标记);(3)横坐标标签为:“面积(平方米)”,纵坐标标签为“价格(万元)”,字体大小为14。②下载波士顿数房价据集,并绘制数据集中各个属性与房价之间的散点图,实现数据集可视化;(3)要求用户选择属性,如图2所示,根据用户的选择,输出对应属性的散点图,如图3所示。(2)使用全部506条数据,实现波士顿房价数据集
这段代码提供了两个主要函数 readColmapSceneInfo 和 readColmapCameras,用于读取和处理 COLMAP 生成的相机参数和场景信息,并将其格式化为易于使用的数据结构。这段代码定义了 Scene 类,用于管理和加载 3D 场景的参数、模型和相机信息,并支持不同分辨率的相机数据。Scene 类结合了高斯模型和数据集处理逻辑,尤其适用于从 COLMAP 或 Blender

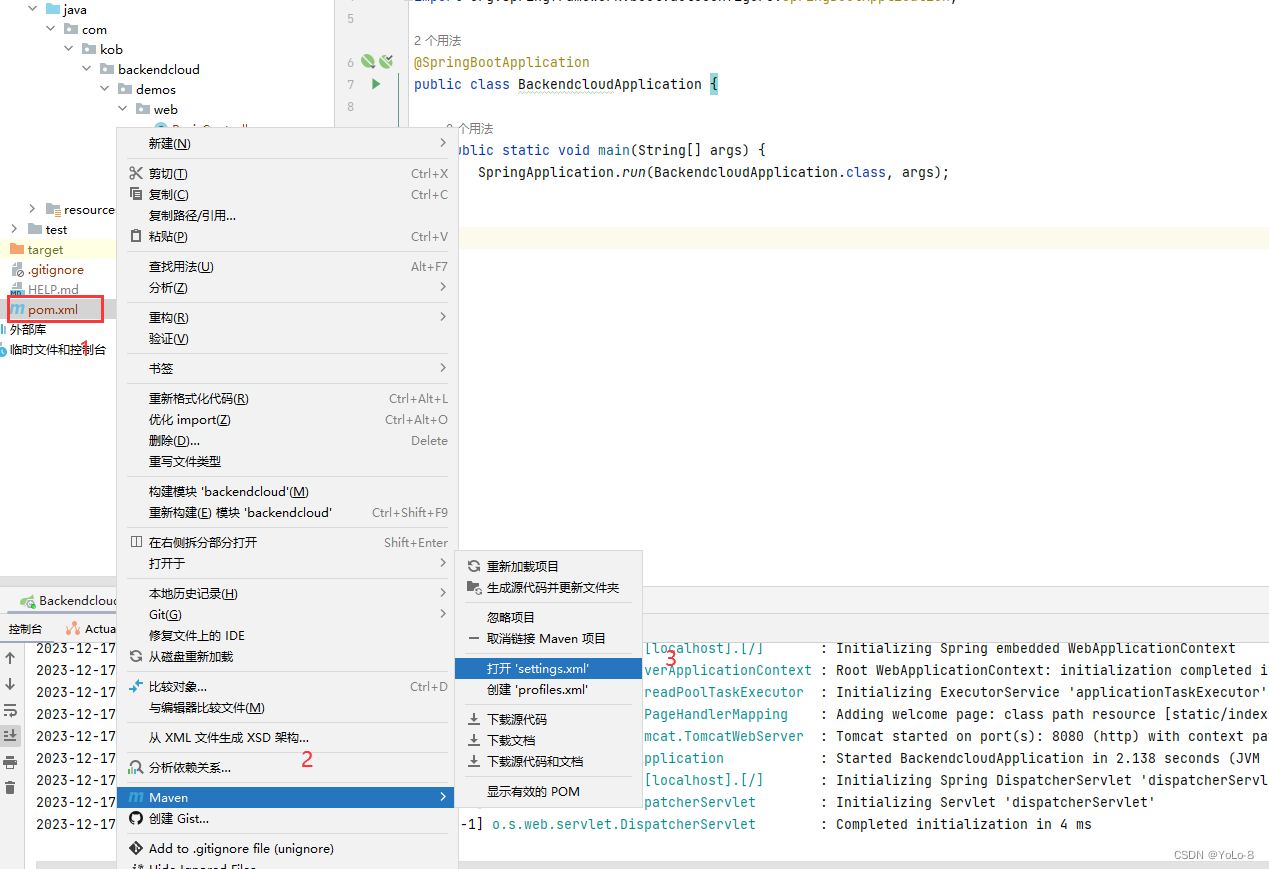
原因:maven会使用远程仓库来加载依赖,是一个国外的网站,所以会很慢。应该使用阿里云的镜像,这样速度会提升很多。”,创建了之后该图标会显示成"open settings.xml",点击它。接着在setting.xml中添加镜像。
linux复制粘贴
修改springboot端口号
(1)下载波士顿数据集,读取全部506条数据,放在NumPy数组x、y中(x:属性,y:标记);(3)横坐标标签为:“面积(平方米)”,纵坐标标签为“价格(万元)”,字体大小为14。②下载波士顿数房价据集,并绘制数据集中各个属性与房价之间的散点图,实现数据集可视化;(3)要求用户选择属性,如图2所示,根据用户的选择,输出对应属性的散点图,如图3所示。(2)使用全部506条数据,实现波士顿房价数据集
kmp算法