登录社区云,与社区用户共同成长
邀请您加入社区
Matlab自动驾驶,基于Matlab实现的计算机视觉代码。计算机视觉是一门研究如何使机器“看”的科学,更进一步的说,就是是指用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步做图形处理。代码可正常运行在自动驾驶领域,计算机视觉扮演着举足轻重的角色。简单来说,计算机视觉就是让机器能像人一样“看”,用摄影机和电脑来代替人眼对目标进行识别、跟踪和测量等,随后再做图形处理。今天就来聊聊
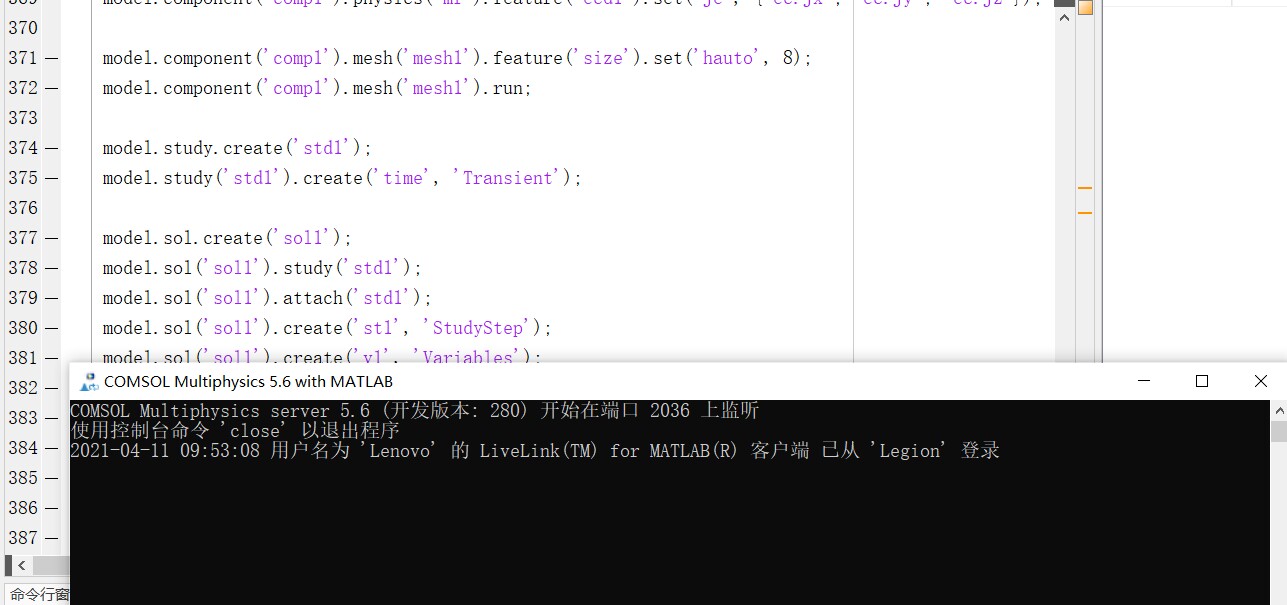
联合仿真comsol matlab联合仿真参数化建模全自动建模迭代分析实现多目标优化 帕累托前沿代码模型与仿真在工程和科研领域,多软件联合仿真正逐渐成为解决复杂问题的关键手段。今天咱们就来聊聊Comsol、Matlab以及Solidworks三软件联合进行参数化建模、全自动建模迭代分析并实现多目标优化的奇妙之旅。
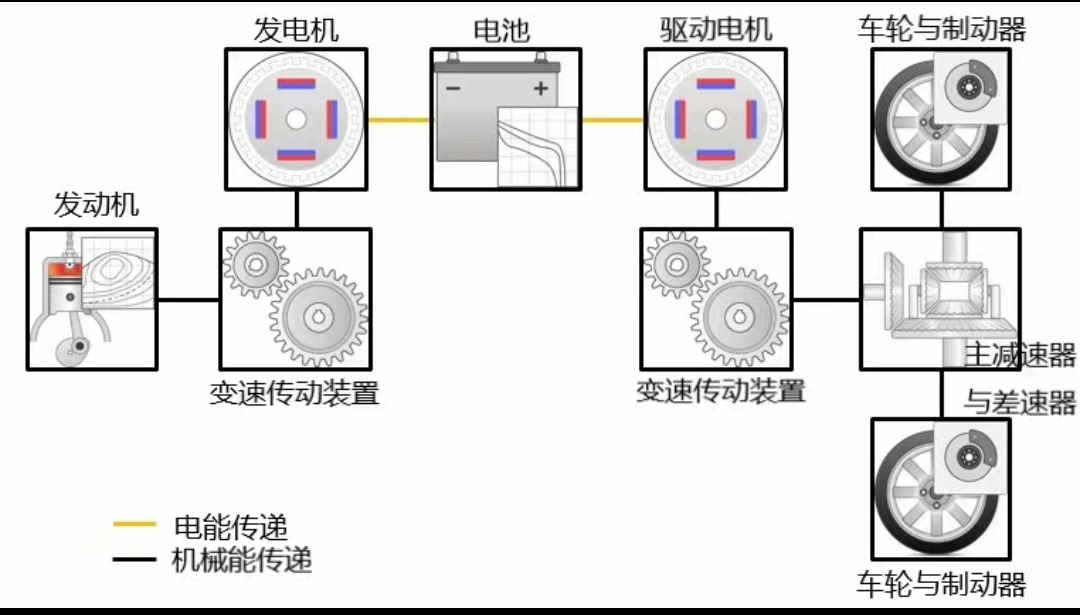
串联式、并联式、混联式混合动力系统simulink控制策略模型(串联式、并联式、混联式每个都是独立的需要单独说拿哪个,默认是混联式RB)有基于逻辑门限值、状态机的规则控制策略(RB)、基于等效燃油消耗最小的控制策略(ECMS)、基于动态规划的控制策略(DP)、基于极小值原理的控制策略(PMP)、基于非线性模型预测控制的控制策略(NMPC)等①(工况可自行添加)已有WLTC、UDDS、NEDC工况;
二阶多智能体系统指的是每个无人机具有质量和惯性,可以进行加速度控制的系统。这类系统在建模时需要考虑每个无人机的加速度、速度和位置状态。在无人机编队控制中,二阶系统模型更为准确,因为它可以反映无人机的运动特性。
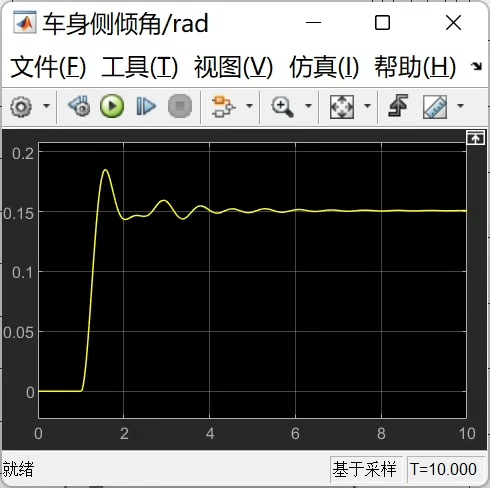
汽车动力学仿真工程师的日常,总离不开和自由度较劲。十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。包含模块:转向系统,整车车身系统,悬架系统,魔术轮胎,车轮系统
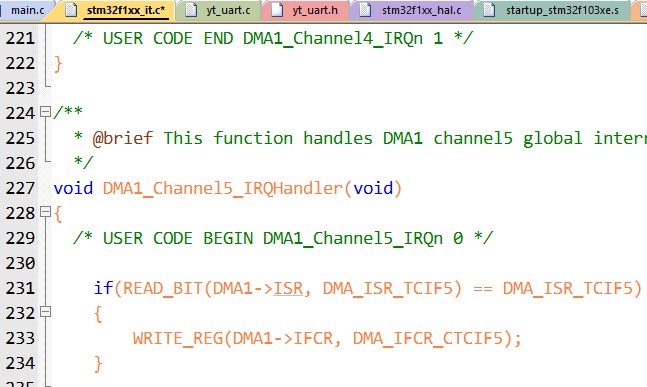
STM32F1系列串口DMA发送与接收。高效率接收,采用DMA和串口空闲中断来处理不定长数据。核心部分纯寄存器操作,效率高,舍弃了HAL库中断处理的繁琐操作。单独的C文件和H文件,方便移植可以代写程序在STM32F1系列的开发中,串口通信是非常常见的需求。而实现高效的串口DMA发送与接收,能够极大提升系统性能。本文将重点介绍如何采用DMA和串口空闲中断来实现不定长数据的高效率接收,并且核心部分使用
Docker原生支持的Java容器化部署,与Istio服务网格形成的技术栈,在自动驾驶仪表盘项目中实现了毫秒级延迟响应。华为HarmonyOS的ArkTS开发框架,在Java VM与Art虚拟机之间建立的联合执行环境,实现了TensorFlow Lite模型与Kotlin代码的无缝调度。Red Hat的AOT编译器创新算法,在流数据处理场景下,Java对象序列化的CPU占用率降低至Python的6
未来C++内存管理可能会更加注重与现代硬件特性的结合,如非统一内存访问架构的支持,以及更细粒度的内存安全保证机制,为高性能计算和大规模系统开发提供更强有力的支持。例如,可以设计一种特殊的智能指针,当指向区域分配器中的对象时,析构函数不执行实际的释放操作,而是依赖区域分配器的批量释放机制。这种方法既保持了智能指针的自动化管理特性,又获得了区域分配器的性能优势,适用于需要同时考虑安全性和性能的复杂系统
perl5.36.0
——perl5.36.0
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 腾讯云开发者社区
腾讯云开发者社区


 AtomGit开源社区
AtomGit开源社区


 魔乐社区
魔乐社区
 鲲鹏昇腾开发者社区
鲲鹏昇腾开发者社区
