




- @qq_59702185
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在介绍神经网络之前,我们先看下面这幅图:人工智能>机器学习>深度学习深度学习是机器学习的⼀个⼦集,也就是说深度学习是实现机器学习的⼀种⽅法。与机器学习算法的主要区别如下图所示:传统机器学习依赖于人工设计特征,并进行特征提取,而深度学习算法不需要人工,而是依赖算法自动提取特征,这也是深度学习被看做黑盒子、可解释性差的原因。卷积神经网络(CNN)循环神经网络(RNN)生成对抗网络(GAN)深度强化网络

使⽤⼿写数字的MNIST数据集如上图所示,该数据集包含60,000个⽤于训练的样本和10,000个⽤于测试的样本,图像是固定⼤⼩(28x28像素),其值为0到255。

我们之前学习了全连接的神经网络,如下图:利用全连接神经网络对图像进行处理存在以下两个问题:CNN⽹络受⼈类视觉神经系统的启发,⼈类的视觉原理:从原始信号摄⼊开始(瞳孔摄⼊像素 Pixels),接着做初步处理(⼤脑⽪层某些细胞发现边缘和⽅向),然后抽象(⼤脑判定,眼前的物体的形状,是圆形的),然后进⼀步抽象(⼤脑进⼀步判定该物体是只⼈脸)。下⾯是⼈脑进⾏⼈脸识别的⼀个示例:CNN网络主要有三部分构成

我们之前学习了全连接的神经网络,如下图:利用全连接神经网络对图像进行处理存在以下两个问题:CNN⽹络受⼈类视觉神经系统的启发,⼈类的视觉原理:从原始信号摄⼊开始(瞳孔摄⼊像素 Pixels),接着做初步处理(⼤脑⽪层某些细胞发现边缘和⽅向),然后抽象(⼤脑判定,眼前的物体的形状,是圆形的),然后进⼀步抽象(⼤脑进⼀步判定该物体是只⼈脸)。下⾯是⼈脑进⾏⼈脸识别的⼀个示例:CNN网络主要有三部分构成
在介绍神经网络之前,我们先看下面这幅图:人工智能>机器学习>深度学习深度学习是机器学习的⼀个⼦集,也就是说深度学习是实现机器学习的⼀种⽅法。与机器学习算法的主要区别如下图所示:传统机器学习依赖于人工设计特征,并进行特征提取,而深度学习算法不需要人工,而是依赖算法自动提取特征,这也是深度学习被看做黑盒子、可解释性差的原因。卷积神经网络(CNN)循环神经网络(RNN)生成对抗网络(GAN)深度强化网络
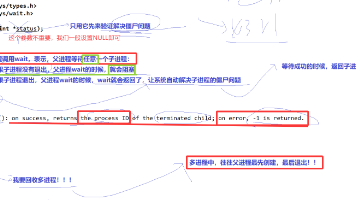
摘要:本文介绍了进程等待的必要性和方法,以及进程程序替换的原理和实现。进程等待是父进程回收子进程资源并获取退出信息的关键机制,避免僵尸进程导致内存泄漏。详细讲解了wait和waitpid两种方法,包括阻塞与非阻塞等待模式。此外,阐述了进程程序替换原理,通过exec系列函数实现子进程执行全新程序,确保进程独立性。文章通过代码示例展示了execl等接口的使用方式,并分析了不同替换函数的参数特点,为进程
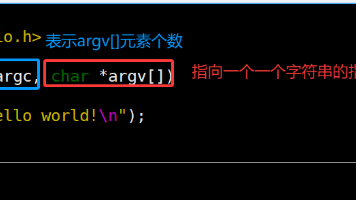
本文介绍了命令行参数和环境变量的相关知识。main函数可以接收命令行参数argc和argv,其中argv[0]是程序名,argc表示参数个数。环境变量是系统级别的全局变量,通过PATH等变量影响程序执行路径。文章讲解了三种获取环境变量的方法:通过main函数参数、getenv函数和C语言的全局指针environ。环境变量具有全局属性,可以被继承到子进程。最后解释了环境变量的作用,如实现用户专属程序
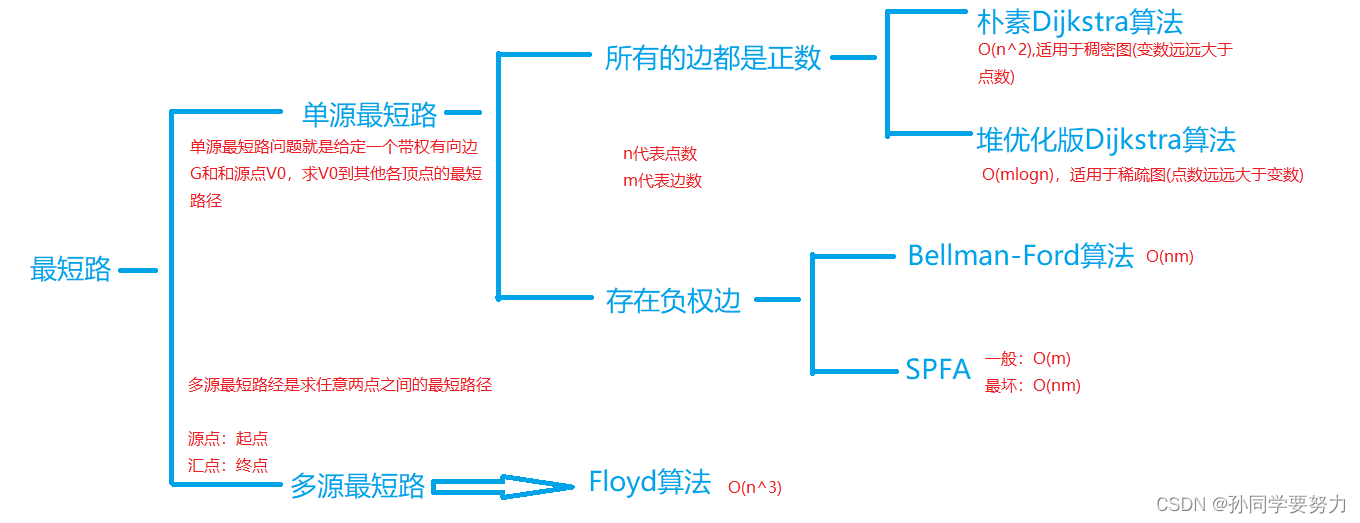
处理负权边我们是采取Bellman-Ford算法或者是SPFA,SPFA算法的适用处更广,但是当有边数权限(在多少步下完成)的时候,我们只能适用Bellman-Ford算法,但在其他情况下我们都可以使用SPFA算法;我们上面知道Bellman_Ford算法会遍历每条边,但是有些边遍历是没有意义的,我们只需要遍历那些到源点距离变小的点才能找到最短路径;SPFA中松弛的概念:一个点到另一个点的路径选择
使⽤⼿写数字的MNIST数据集如上图所示,该数据集包含60,000个⽤于训练的样本和10,000个⽤于测试的样本,图像是固定⼤⼩(28x28像素),其值为0到255。
我们之前学习了全连接的神经网络,如下图:利用全连接神经网络对图像进行处理存在以下两个问题:CNN⽹络受⼈类视觉神经系统的启发,⼈类的视觉原理:从原始信号摄⼊开始(瞳孔摄⼊像素 Pixels),接着做初步处理(⼤脑⽪层某些细胞发现边缘和⽅向),然后抽象(⼤脑判定,眼前的物体的形状,是圆形的),然后进⼀步抽象(⼤脑进⼀步判定该物体是只⼈脸)。下⾯是⼈脑进⾏⼈脸识别的⼀个示例:CNN网络主要有三部分构成