- @m0_51220742
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
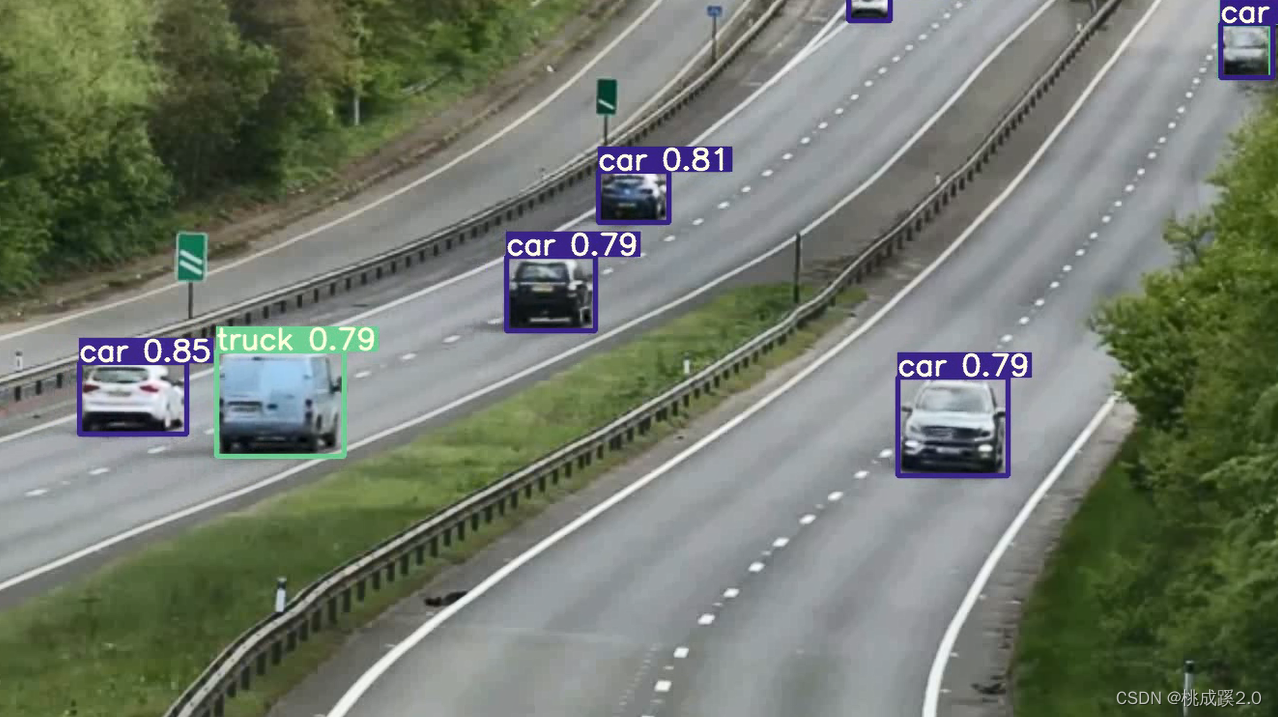
文章目录1、运行官网YOLOV5代码1、下载源代码2、文件夹解析2、训练自己的神经网络模型3、获取目标中心坐标本文仅讨论YOLOV5的目标检测使用过程的一些记录,不涉及CUDA的配置,以及一些环境的配置问题,相关问题可以参考我的其他博客。1、运行官网YOLOV5代码1、下载源代码首先肯定找开源代码,目前似乎大部分代码都是在下面的代码修改而来的,我们从git上找到大神的开源代码:ultralytic
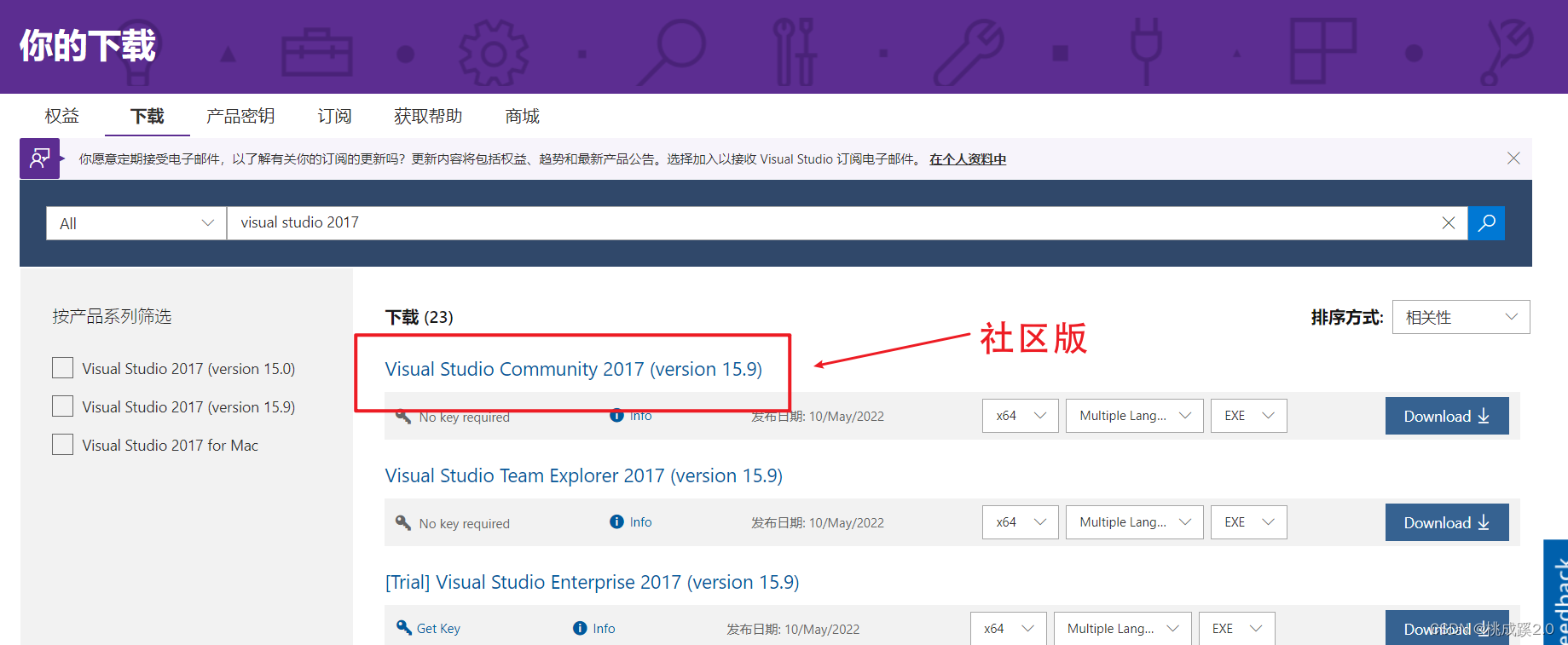
文章目录1、opencv的安装1、vs2017安装2、opencv的下载和配置2、基本函数学习1、读取图片2、读取视频3、读取摄像头4、图片转换1、opencv的安装1、vs2017安装这里首先是安装vs2017,这里直接去官网安装即可,下载2017时因为好像新的有的不太适应,网上一些教程也是2017的比较多,所以直接下载这个版本就好了。网址如下:https://my.visualstudio.c
前提是已经安装了c语言需要的扩展,然后运行的库都已经什么的安装好了可以直接运行的那种,环境搭建什么的不记录,这样的情况下我们从别处复制一段c程序应该这样的:测试代码如下#include <stdio.h>int main(int argc, char** argv){int a, b, c, max;printf("请输入3个整数:");scanf("%d,%d,%d", &a
esp32开发使用的都是乐鑫的idf,vscode上有其插件可以下载:这里注意选择1.2.0版本的,1.3.0那个安装页面没有了,反正装这个版本没啥影响。如果不小心装了1.3.0,可以在插件那里点设置,安装另一个版本即可。首次打开(或者说之前没装过),打开插件就能看到这个页面:这里选择高级,然后对目录做一些处理:这里准备两个文件夹,用来放idf和tools服务器来源尽量选择乐鑫的,我试了科学上网g
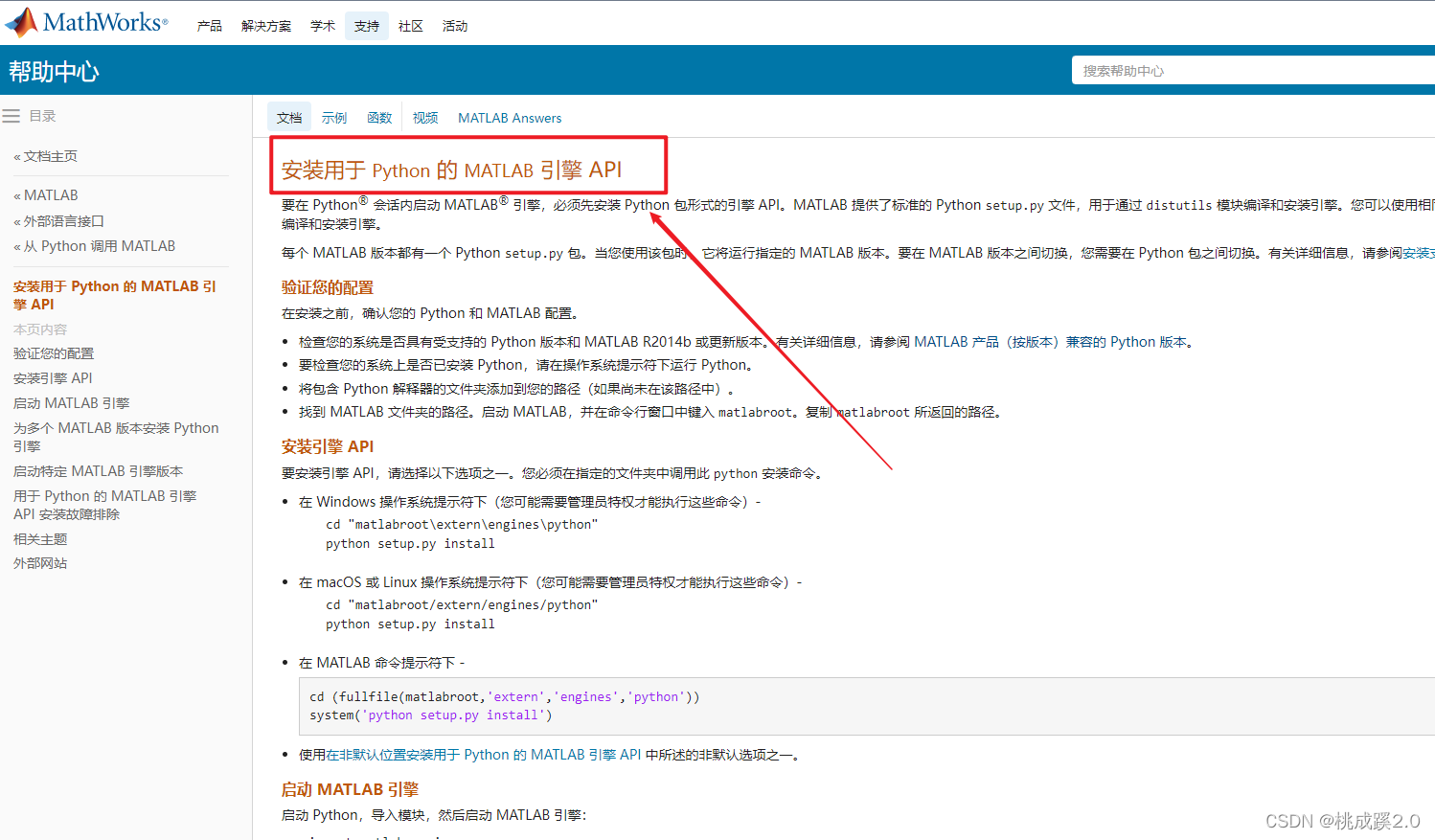
文章目录1、原理2、正式安装3、配置vscode4、正式测试前几天有高中同学问我matlab的问题,从上完课之后就好久没摸过了,弄了好久才给他讲清楚,老尴尬了,正好又看到安富莱硬汉哥发了这个matlab和vscode联调的视频,觉得还是非常不错的,整合了vscode和matlab的优点,写代码变得更方便了!原作者出处如下:https://www.bilibili.com/video/BV1z541
EIDE介绍一款适用于8051/STM8/Cortex-M/RSCv的单片机开发环境。在 vscode上提供8051,STM8 Cortex-M,RISC-V-项目的开发编译烧录等功能。使用文档:简介 (em-ide.com)论坛地址:Embedded IDE Forum (em-ide.com)安装之后vscode上会多一个栏目GD32VF103STM3251...

最近看了这个大佬的文章,写了使用远程来挂载linux的方案,觉得还是很有意思的,瞬间感觉linux这块都还是相通的,就跑了一下,但是这个博主只讲了用网络挂载,我觉得还可以弄个本地的,这样更方便。

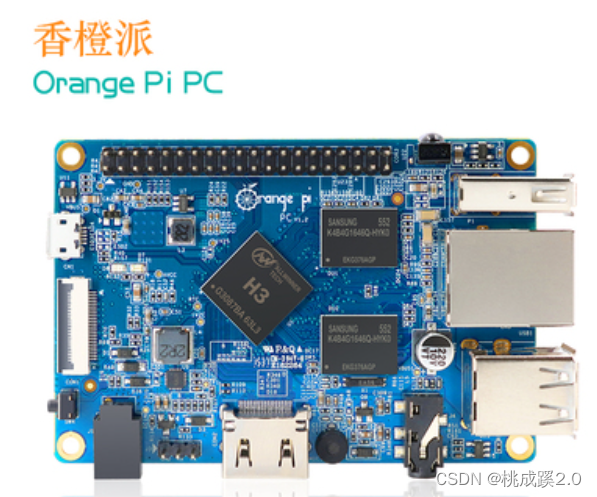
文章目录1、香橙派介绍2、安装系统3、换源更新4、安装opencv注:本人也是初次接触,并且本人在linux方面的基础很弱,因此本文也不会有太多的技术含量,本文仅记录下这个上手过程,希望之后的小白能少走点弯路就是了1、香橙派介绍2、安装系统3、换源更新4、安装opencv......
最近看了这个大佬的文章,写了使用远程来挂载linux的方案,觉得还是很有意思的,瞬间感觉linux这块都还是相通的,就跑了一下,但是这个博主只讲了用网络挂载,我觉得还可以弄个本地的,这样更方便。
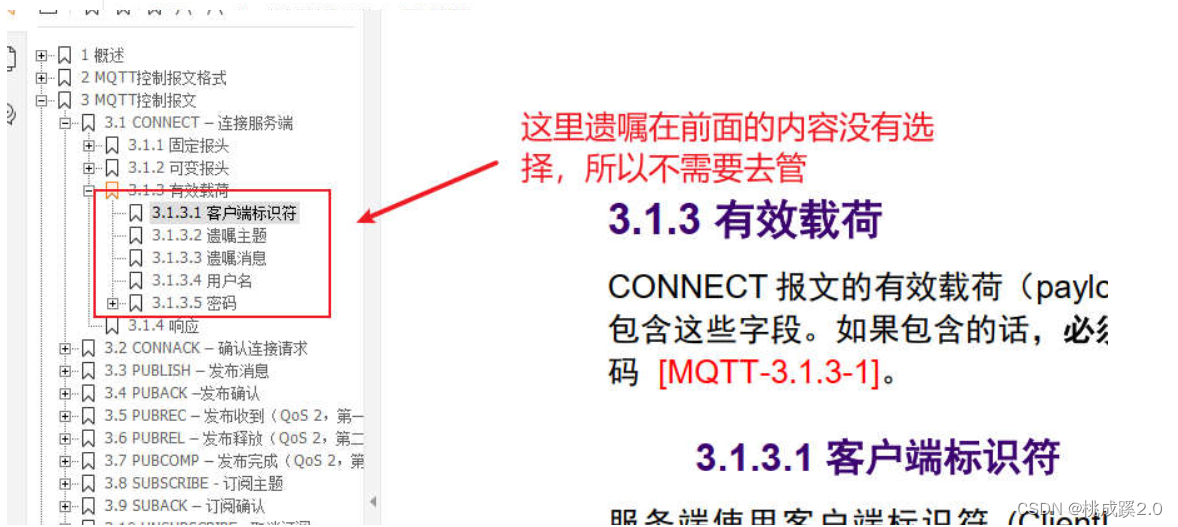
本文还是需要参考mqtt的中文协议文档,所有的变种都是基于这个的。之前的文章已经提到过一些mqtt的格式,这里不再赘述,需要的可以直接翻看之前的文章了解查看,目前mqtt总的报文如下:connect是一号报文,需要第一个发送,包括一些鉴权信息(用户名,密码等),方向是从客户端到服务器,二号报文是服务器回复客户端的,回复客户端连接正确与否,方向是从服务器到客户端。之后关注一下ping相关的报文,PI