




- @knighthood2001
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
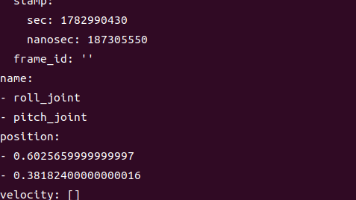
我这里有个问题,就是我计算base_link到root的rpy,我通过gui调整r或者p,输出也只会变动r或者p,但是如果我r和p都改变了,那么计算的base_link到root的rpy中,rpy中y也变化了。比如我在joint_state_publisher_gui设置的rp为0.704,0.620,但是通过tf计算的base_link到root的rpy为roll=0.807, pitch=0.
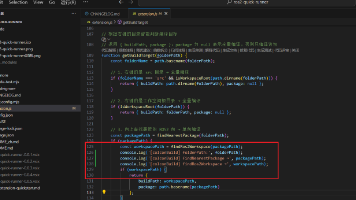
这次 ImageIO 鸿蒙 PC 适配的重点,不是单纯证明“Python 命令能跑”,而是把 Python 三方库能力接入到一个真实鸿蒙 PC 应用里,并形成用户可操作的完整闭环。新增鸿蒙 PC 工程;ArkTS 页面实现选择图片、选择格式、质量调节、转换并导出;ArkTS Client 把业务操作封装成 JSON 请求;Native/N-API 启动 HNP Python;Python work
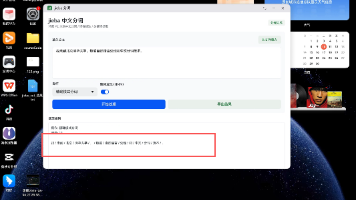
我在开发vscode扩展的时候,经常时不时会脑抽-不知道去哪看调试日志。然后F5打开调试,这时候打开了一个新的vscode。其实,他就在原始vscode的调试控制台上。然后这时候我就晕了,需要去哪找日志。比如我这里添加了日志。
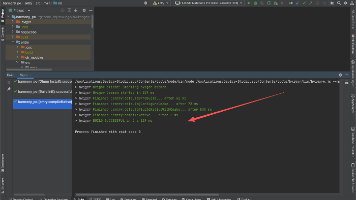
今天遇到一个问题,我在开发vscode扩展的时候,我把vscode扩展中的package.json写为1.100.0的时候,我用yo脚手架搭建好框架后,使用F5进行调试,根本没有反应。这里可以看到,我这边的vscode版本是1.95,我保留这个版本是因为,这个版本能够远程ssh连接ubuntu20.04等系统,更的太新会导致ssh无法使用。后来我把package.json中的vscode版本改小后
欢迎加入鸿蒙PC开发者社区,共同打造开发者工具生态:鸿蒙PC开发者社区:https://harmonypc.csdn.net/项目开源地址:https://atomgit.com/OpenHarmonyPCDeveloper/ohos_jieba欢迎在PC社区平台申请新建项目:https://atomgit.com/OpenHarmonyPCDeveloper这篇文章记录的是一次把 Python
欢迎加入鸿蒙PC开发者社区,共同打造开发者工具生态:鸿蒙PC开发者社区:https://harmonypc.csdn.net/项目开源地址:https://atomgit.com/OpenHarmonyPCDeveloper/ohos_JD-GUI欢迎在PC社区平台申请新建项目:https://atomgit.com/OpenHarmonyPCDeveloper这篇文章记录的是JD-GUI这个经典
欢迎加入鸿蒙PC开发者社区,共同打造开发者工具生态:鸿蒙PC开发者社区:https://harmonypc.csdn.net/项目开源地址:https://atomgit.com/OpenHarmonyPCDeveloper/ohos_fontTools欢迎在PC社区平台申请新建项目:https://atomgit.com/OpenHarmonyPCDeveloper这篇文章记录的是一次把 Pyt

今天说一下关于labelimg安装的一些问题。labelimg是图像标注工具,cv中经常会用到。如果你pip版本过低,cmd终端中执行下面命令,升级pip(安装虚拟环境的时候,可能pip的版本会过低,提示你要先升级一下)

云计算四种模式:公有云、私有云、混合云和行业云(本文讲述)
