- @jk_101
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
很容易理解,如果选择了通过外部管脚输入时钟,那这里就是让选择具体的管脚。13. ①选择输入时钟的方式,这里的输入时钟就是我们上一个页面中的设置的200MHz的输入时钟,如果选择差分或单端,则输入通过FPGA的管脚输入200MHz时钟到MIG的IP Core;这篇文章我们讲一下Virtex7上DDR3的测试例程,Vivado也提供了一个DDR的example,但却是纯Verilog代码,比较复杂,这
导读:本期文章主要介绍永磁同步电机矢量控制,两种控制策略(id=0和MPTA)。在相同工况条件下,比较两种控制策略各自的控制性能。如需要文章中的仿真模型,关注微信公众号:浅谈电机控制,获取。一、永磁同步电机矢量控制(FOC)1.1永磁同步电机矢量控制策略本文主要介绍前两种控制,后面的后期再单独介绍。小结:1.2工作原理矢量控制也称为磁场定向控制。由于在永磁同步电机输入交流电时会在电机内部产生电磁转
fgetl函数读取文件中的行,并删除换行符。语法tline = fgetl(fileID)说明tline = fgetl(fileID)返回指定文件中的下一行,并删除换行符。如果文件非空,则fgetl以字符向量形式返回tline。如果文件为空且仅包含文件末尾标记,则fgetl以数值-1的形式返回tline。示例1.一次读取文件的一行读取文件的一行内容,第一次读取时先排除换行符,第二次读取时再包含换
调整视觉展示以提高模型的可读性目录一、改进模型布局二、翻转或旋转模块三、管理模块名称1、隐藏或显示模块名称2、移动模块名称四、指定模型颜色五、指定模型字体1、Linux计算机上的 Select Font 对话框六、增加阴影深度七、为模型区域添加方框和标签1、将区域转换为子系统八、在模型元素之间复制格式构建模型时,可以调整模块的位置、更改模块和背景颜色、调整字体,并添加有助于提高...
虽然神经网络在机器人视觉伺服中已得到应用,但许多智能方法在机器人视觉伺服系统中还没有得到充分地应用,而且,目前研究有过于依赖数学建模和数学计算的倾向,这使得机器人视觉伺服系统在工作时计算量太大,目前计算机的处理速度很难满足系统快速性的要求,但是人类在实现有关的功能时并不是通过大量的计算来完成的,这就启发大家是否可以用人工智能的方法降低数学计算量,以满足系统快速性的要求。多目视觉伺服系统可以获取目标
FOC-Field Oriental Control,磁场定向控制,又称矢量控制,是通过控制变压器输出电压的幅值和频率控制三相交流电机的一种变频控制方法。
目录周期性波形非周期性波形扫频波形脉冲序列此示例说明如何使用 Signal Processing Toolbox™ 中提供的函数生成广泛使用的周期和非周期性波形、扫频正弦波和脉冲序列。周期性波形除了 MATLAB® 中的 sin 和 cos 函数外,Signal Processing Toolbox™ 还提供其他函数(如 sawtooth 和 square)来生成周期性信号。sawtooth 函数
如果只想打包单个IP核,在Sources窗口的IP Sources标签下,在对应IP核的右键菜单中,选择“Enable/Disable Core Container”,来启用或禁用Core Container功能,如下图所示。在Vivado中生成 IP核时,一般默认是对应的IP核文件夹会生成在工程目录的.srcs/sources_1/ip路径下。在项目Settings中的IP标签下,选中“Use

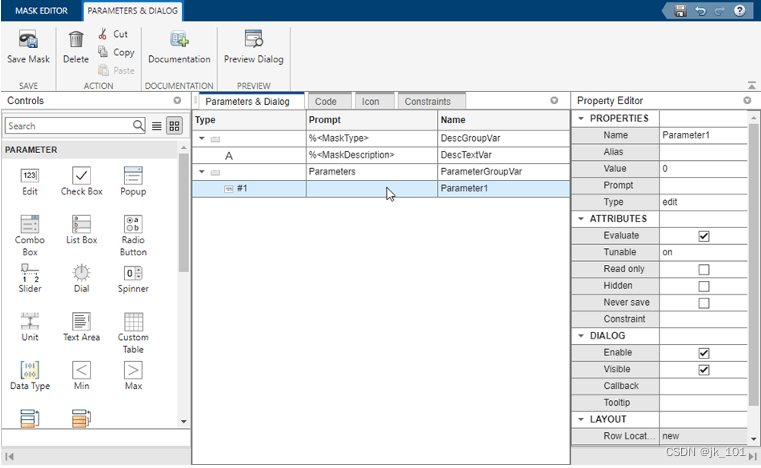
提供文字或 HTML 文本.如果帮助字段的第一行不是 URL,或者 web 或 eval 命令,Simulink 将在 MATLAB Online Help 浏览器中的某个标题下显示该文本,该标题是封装类型字段的值。为了更加直观和清晰的分析仿真,会将多个元件实现的一个功能封装在一起,通过参数对话框窗格,可以使用参数、显示和动作选项板中的对话框控制设计封装对话框。Simulink 使用在封装对话框中