- @iscada
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Robotsim机器人仿真,示教点插入与回放仿真演示指令示教后,将示教点保存到列表中,用于后续编辑,通过插补,进行指令回放,实现仿真示教与回放。

程序涉及usercontrol控件的开发,调用集成和tcp方式接收数据,进程间实时显示等功能学习。采用socket方式建立tcpserver,然后监听客户端数据,接收和显示在控件上。采用c#语言开发usercontrol数码管控件,用于实时显示数值。主程序调用数码管控件用于实时数据显示。

1概述运动学是研究机器人的最基本基础。对于臂式机器人的研究现在已经很成熟,但是对于不同自由度的臂式机器人的数学建模、仿真研究还是很复杂,容易出现错误,在仿真时也不容易建立三维模型进行仿真研究。本软件采用DH参数法,只要一个DH参数表(熊有伦改进DH法),就可以建立任何臂式机器人(3自由度到7自由度均可)的三维仿真模型,同时,自动生成机器人的正向运动学、逆向运动学、轨迹规划、仿真示教和绘图写字功能。
机器人关节空间与笛卡尔空间示教演示在RobtSim机器人快速仿真软件中,对关节空间和笛卡尔空间进行示教演示。关节空间中机器人运动对末端无法有效控制,笛卡尔空间对末端可有效控制,但是对关节空间无法有效控制,各有利弊!下面是直播演示机器人关节空间与笛卡尔空间示教仿真-CSDN直播...

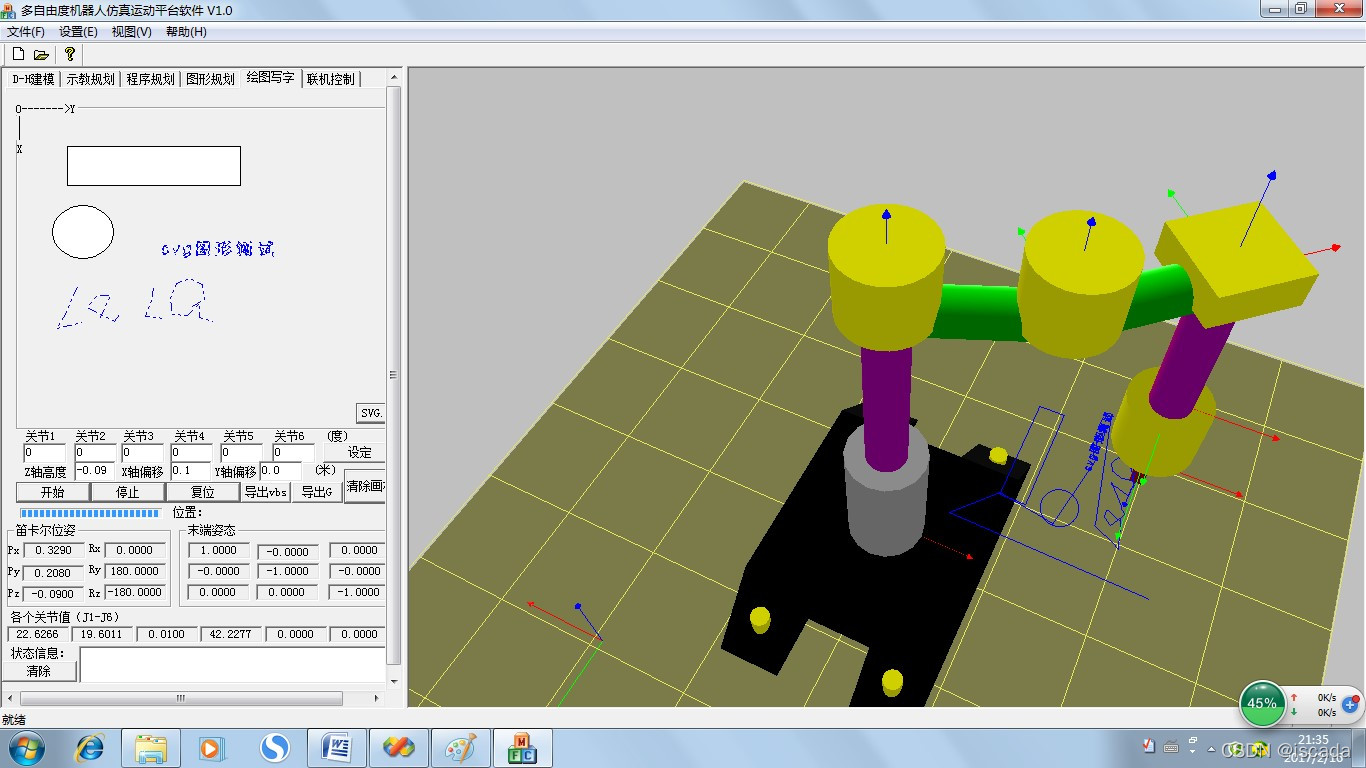
采用RobotSim软件开展dxf图形离线编程演示在选择机器人模型后,机器人自动建模,并通过选择三维图形,导入到机器人工作空间,机器人自主完成图形的识别和轨迹规划,并动画再现整个规划过程。最后可生成后置代码或者轨迹序列,或者导出机器人编程语言,通过编程语言还可以再现离线编程过程。...
1 概述RobotSim采用VS2005 VC++开发,结合OPENGL实现了一款专门对应臂式机器人的轨迹规划仿真和控制软件。该软件能提供任意3到6自由度臂式机器人的三维空间自动建模功能,同时能生成机器人正运动学(正解)和机器人逆运动学(逆解)。机器人DH参数可由用户配置和修改,并可保存成对应的机器人配置文件,形成机器人类型库,方便后续再次使用。RobotSim是一款适合3到6自由度臂式机器人的建
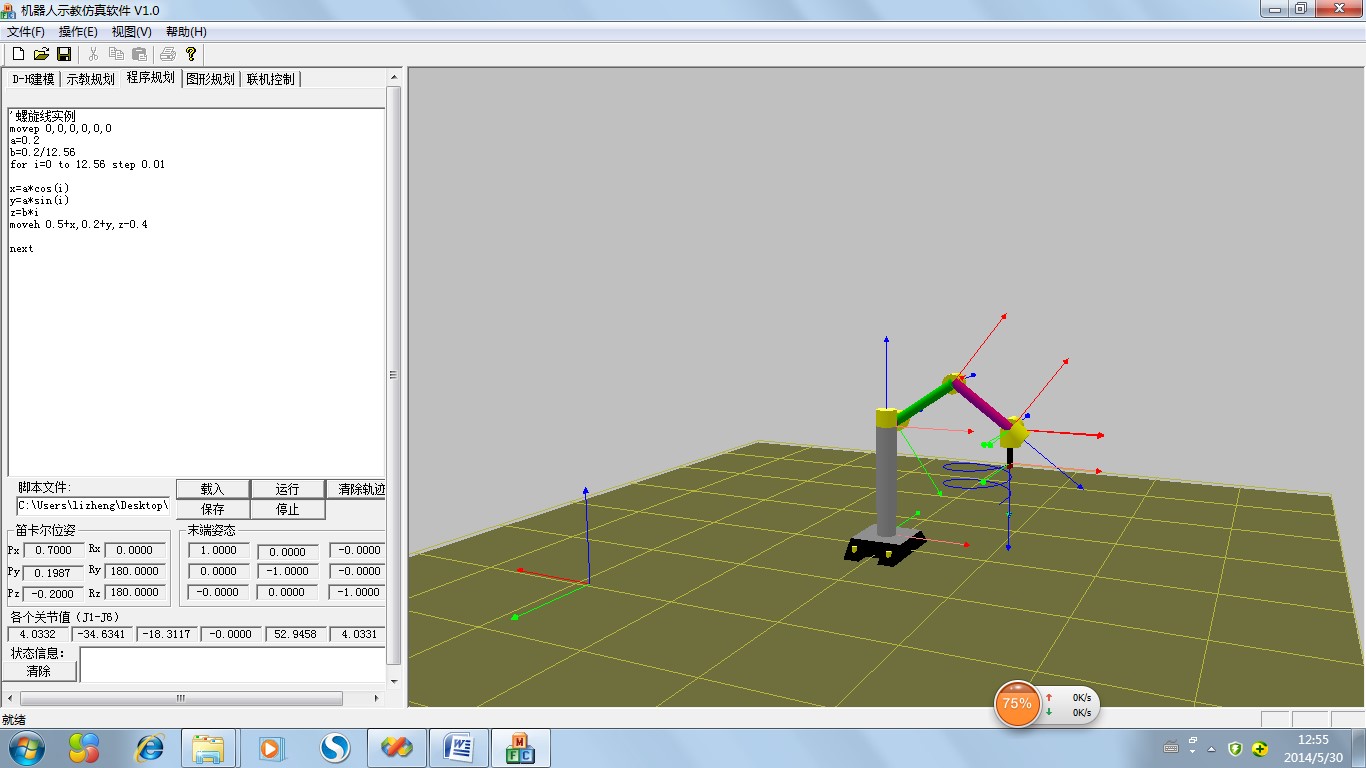
采用VB基本语言,在其中嵌入机器人运动控制指令,扩展成机器人高级编程语言。本例子演示的是高级螺旋线轨迹规划。movep 0,0,0,0,0,0a=0.2b=0.2/12.56for i=0 to 12.56 step 0.01x=a*cos(i)y=a*sin(i)z=b*imoveh 0.5+x,0.2+y,z-0.4next采用自研的VB脚本机器人语言进行机器人螺旋仿真规划...
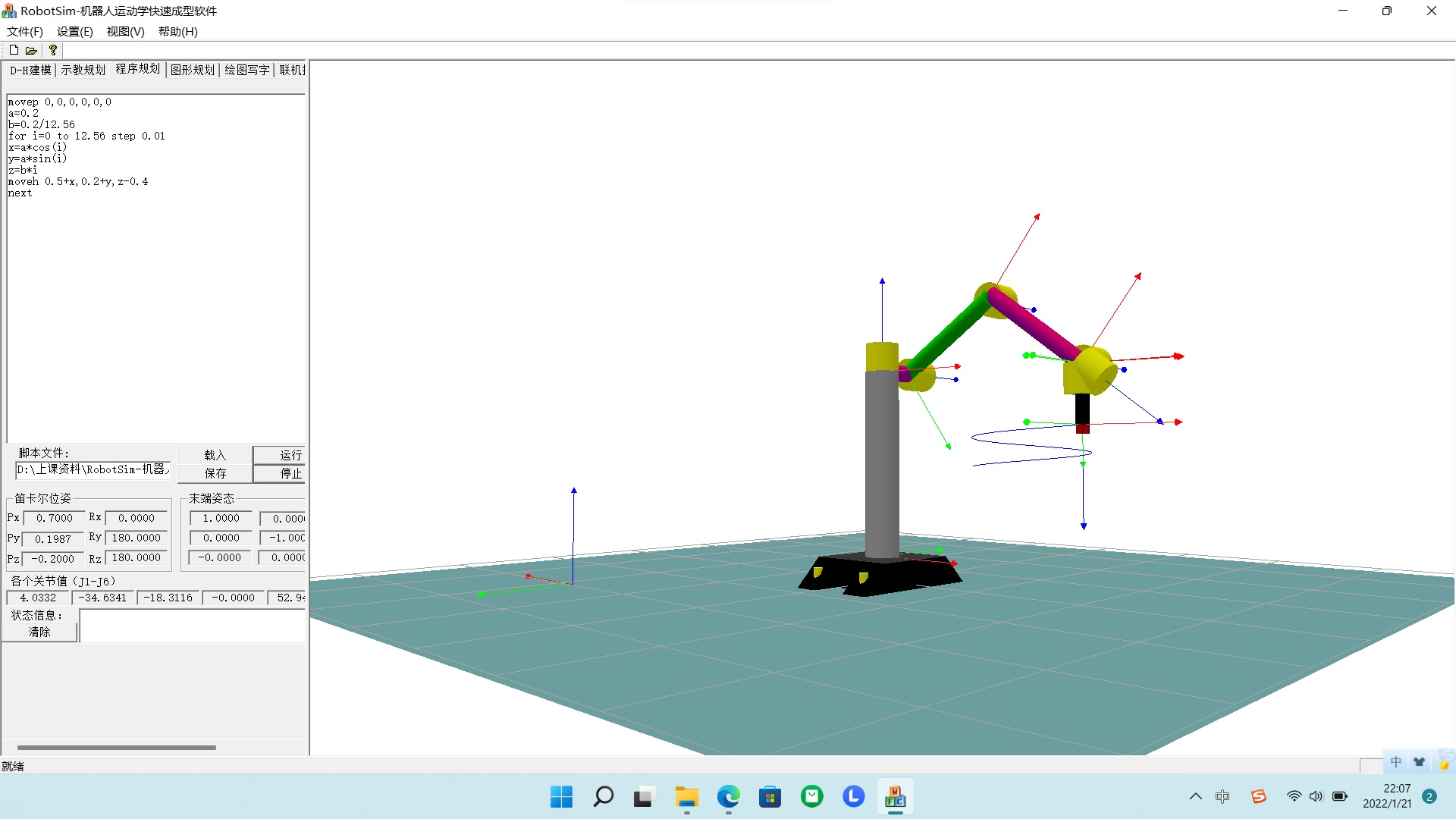
RobotSim机器人语言编程与轨迹规划演示-CSDN直播RobotSim机器人离线编程软件采用VBScript脚本语言,扩展机器人运动控制指令,形成了机器人编程语言。功能强大,可与计算机编程语言一样开展机器人运动编程和离线编程规划本空间有下载演示...
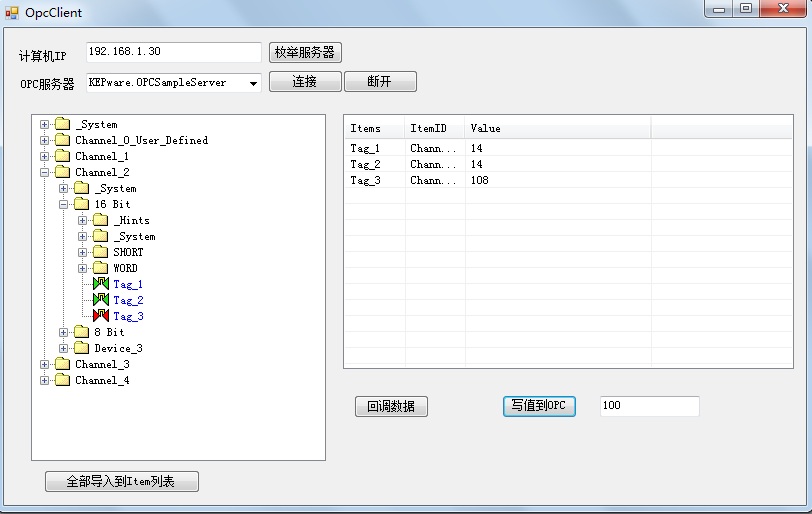
OPC作为国际标准接口,是由OPC基金会维护的一项技术。目前有OPC DA,OPC UA规范,本调试助手是符合OPC DA 2.0标准的测试软件,可以用于和OPC服务器连接通信和调试使用。使用步骤1,自动枚举本机服务器2,添加服务器上要监控的数据项3,对数据项进行读操作(本例为回调方式自动读)4,显示数据项实际值在软件界面上5,通过选中数据项对该项进行写操作下载里免费提供该OPC客户端测试工具..
1,采用词法解析完全开发了一套c语言的解释器DLL库。3,功能同TC语言类似,可以自行扩展语言接口函数。2,主程序调用DLL库实现对c语言的解释和执行。4,是学习语言词法,解释执行的佳例。