




- @chui_yu666
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
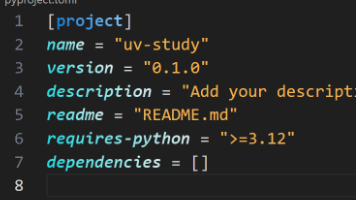
UV 是一款基于 Rust 编写的 Python 环境管理工具,集成了 Python 版本管理、虚拟环境创建与管理、依赖安装等功能,性能优于传统的 venv 和 conda 等工具。UV 支持 PEP 582,无需 virtualenv,可直接使用 __pypackages__ 进行依赖管理,并兼容 requirements.txt 和 pyproject.toml。安装 UV 可通过 pip、c
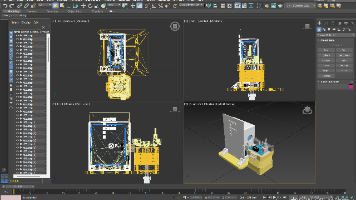
由于项目需求,要将SolidWorks中绘制的3D装配体模型导入到Unity当中,但在网上并未找到比较好的图文模型,对于此需求都只是提一嘴而已。因此这里将自己找到的教程进行汇总解析。SW导入Unity有两种方法,其中两种方法都需要到另外的第三款软件。这里先介绍第一种方法,后续会更新第二种方法。第一种方法是使用Blender软件进行STL转FBX,优点是Blender软件小,导入简单,缺点是会丢失材
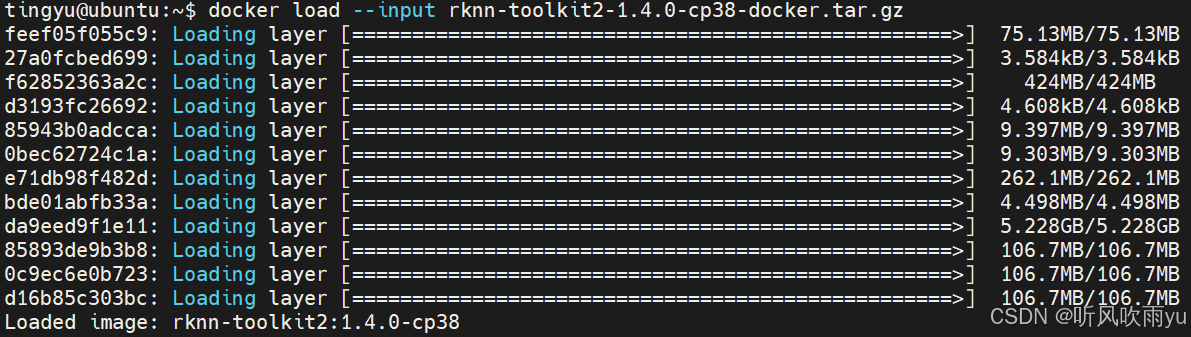
下面是前期准备:1.环境存储:建议100G以上(我感觉50G左右可能够)2.文件rknn-toolkit2-1.4.0.zip(下载链接见4.其它)onnx模型(算子集版本小于等于 12,具体原因详见4.其它中的3.1报错提示)验证图片模型的类别3.方式本博客使用VMware虚拟机以及VMware共享文件夹实现虚拟机和主机之间的互传文件。
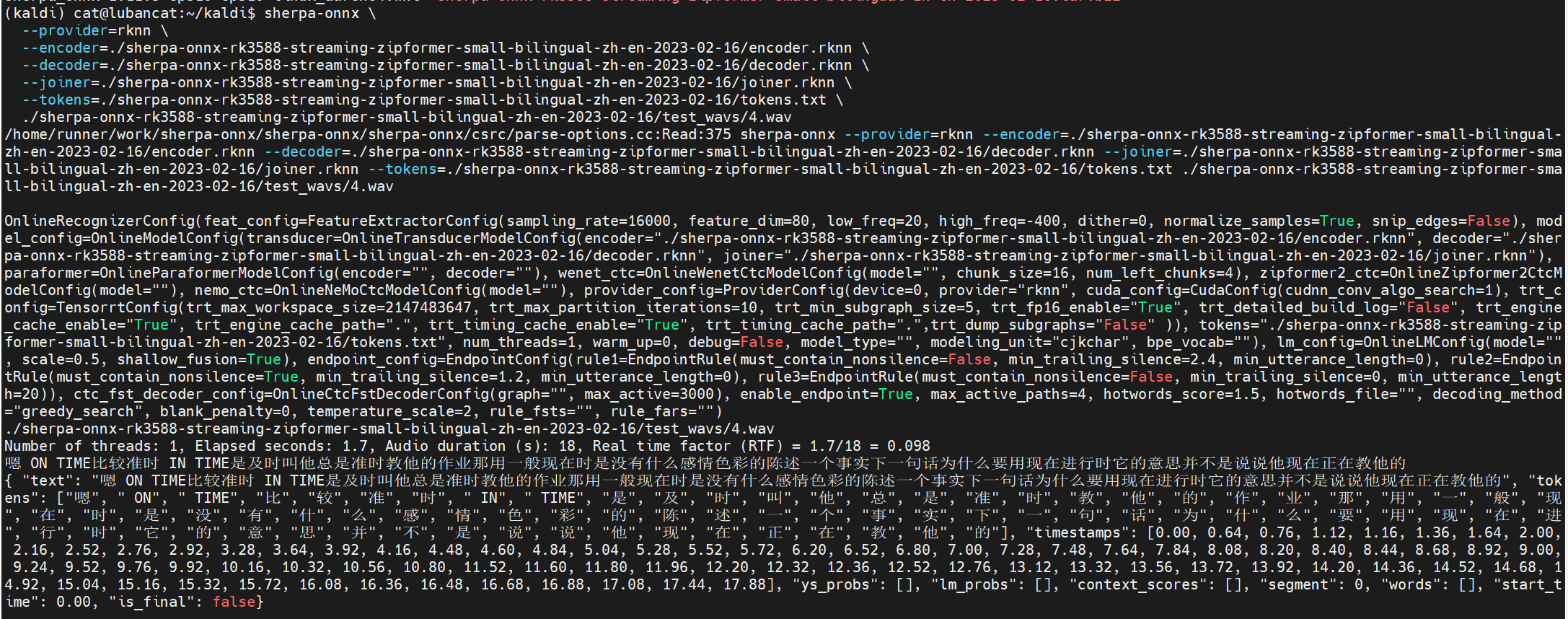
使用Sherpa-onnx实现RK3588的流式实时语音识别
首次运行会下载模型文件,模型文件会被下载到当前电脑用户的**.cache/modelscope/hub/iic**文件夹中。当然,也可以手动下载模型并放到这个目录下,如果手动下载模型的话,就不需要执行这一步了。FunASR的部署可以使用Docker,有关Docker的部署教程就很多了,一搜就是一大堆,我就不写了。阿里新开源的FunASR仓库(语音转文字),识别速度快,精度高。修改代码中的要识别的w

本文详细介绍了如何在Linux系统(以Ubuntu 22.04为例)上安装EMQX开源版MQTT服务器。首先,通过官网下载适合系统的安装包,使用wget命令获取文件。接着,安装必要的依赖库,并使用dpkg工具安装EMQX。安装完成后,通过systemctl命令启动服务,并验证安装是否成功,访问管理控制台(默认端口18083)进行确认。文章还提供了其他常用操作命令,如停止、重启服务、查看日志等,以及
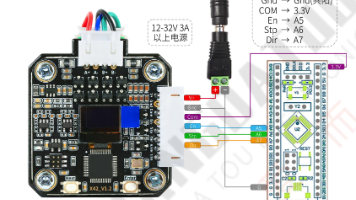
本文介绍了如何使用MCP控制STM32的开发流程。首先,从GitHub下载源码并进入项目目录。接着,创建并激活虚拟环境以避免依赖冲突,并根据操作系统选择合适的激活命令。随后,通过pip安装所需的依赖包。在代码修改部分,需根据使用的大语言模型(如ollama或DeepSeek)调整.env文件中的配置,并修改server-led.py中的串口设置。最后,运行MCP代码即可。对于STM32部分,使用K

步进电机是一种以数字脉冲信号为控制信号的电机,它的运动是由控制器发出的脉冲信号驱动的。步进电机每接收到一个脉冲信号,就会按照固定的步距角度(通常为1.8度或0.9度)运动一步。步进电机由转子和定子两部分组成,转子由磁性材料制成,定子由线圈和磁铁组成。控制器通过改变线圈中电流的方向和大小来实现控制步进电机的转动方向和速度。所以,想要驱动步进电机,就需要给驱动板发送脉冲就行。一般来说,使用脉冲控制方式
Unity通过Socket通信连接本地Python如何做到Unity连接其它的所有呢?有了Unity连接本地Python这一方案的话,基于Python强大的胶水语言、网上资料超多的特点,就可以再次用Python去连接更多更多的东西,从而使得Unity可以连接近乎一切你想到的能用Python连接的东西。
