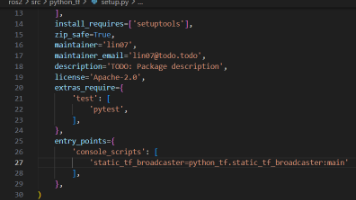
- @2402_88126487
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
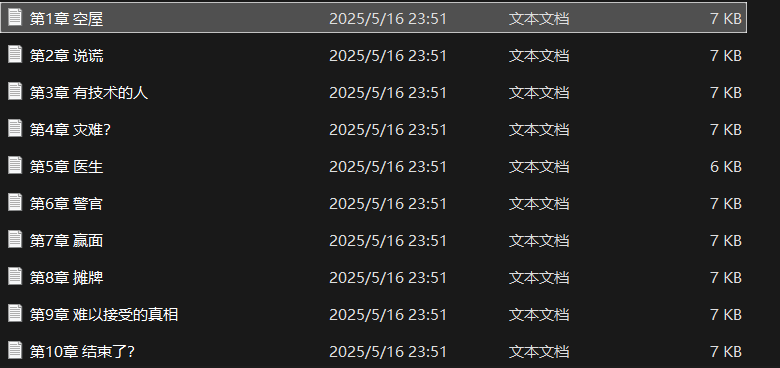
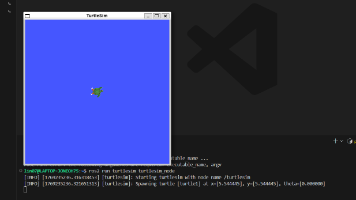
通过里程计可以获取机器人的位置信息,激光雷达可以获取环境的位置和距离信息先启动上一章的仿真机器人。配置,运行再打开一个终端,打开rviz固定节点改为里程计点击“Add”,选择“By topic”里的odeometry保留数据的长度改为1000再点击“Add”,添加“Laserscan”(点的大小size可自行调整)将保留数据的时间改为1000再打开一个终端,运行键盘控制节点,控制机器人移动奇了怪了
虽然AI已经大大方便了我们项目的开发(有段时间我都不去看代码,完全让AI给我改了-捂脸),但我觉得还是要有些基础认识的,后面也会努力的看看AI给我改的代码(之前也有遇到给我乱改的情况,还是要人为检查下好)。
虽然AI已经大大方便了我们项目的开发(有段时间我都不去看代码,完全让AI给我改了-捂脸),但我觉得还是要有些基础认识的,后面也会努力的看看AI给我改的代码(之前也有遇到给我乱改的情况,还是要人为检查下好)。
JSP的全称是(Java 服务器页面),是一种能在 HTML 里嵌入 Java 代码的网页技术,比如<% out.print("你好," + 用户名);%>,就能动态显示不同用户的名字。核心特点:它是「服务器端」的技术:代码不在浏览器里跑,在服务器(比如 Tomcat)里跑。最终生成的还是 HTML:服务器执行完 Java 代码,会把结果转成纯 HTML 发给浏览器,所以浏览器看到的和普通网页没区
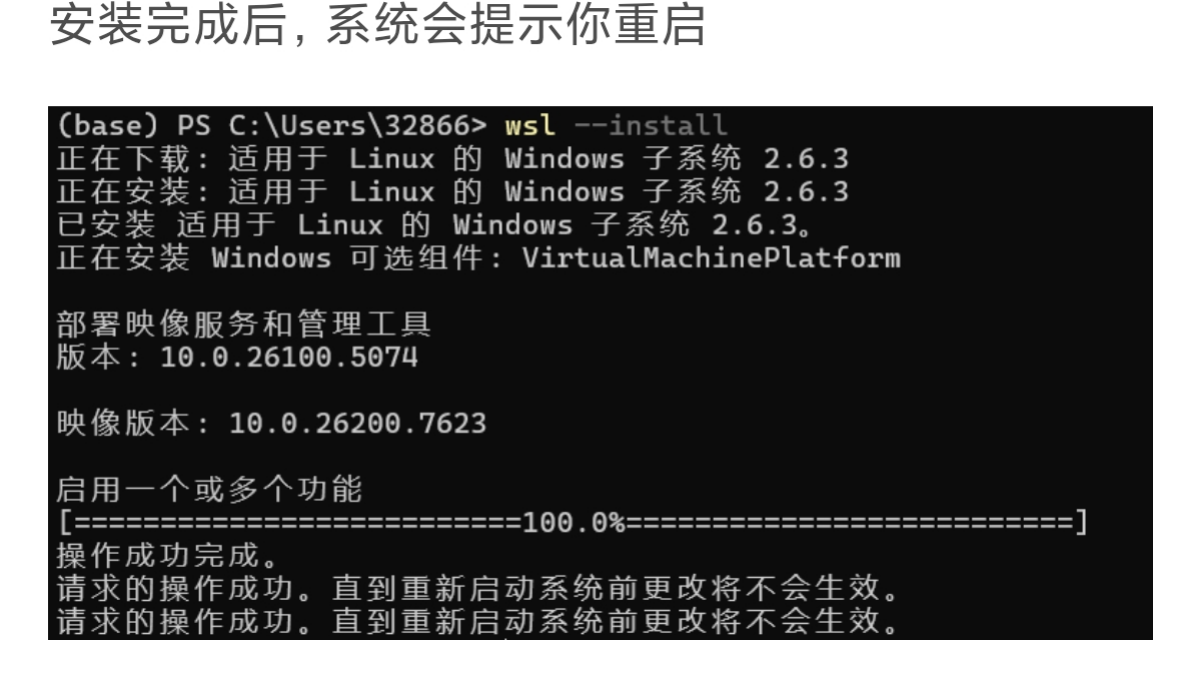
先理一下关系:CVAT是专门标注图片/视频的计算机视觉领域标注数据集的常用工具WSL是Windows上的“简化版Linux虚拟机”,不用重装系统,就能在Windows上用Ubuntu等 Linux 环境。Ubuntu是最常用的Linux发行版,稳定适配开发/部署场景Docker是环境打包工具,可以把CVAT、依赖、配置全装进去,可以跨系统一键运行而官方打包的CVAT Docker镜像里,Web服务
TF(Transform)是ROS2中用于处理机器人各部件之间坐标系变换的核心功能,是机器人开发中定位、导航、感知的基础。机器人有很多部件,每个部件都有自己的局部坐标系。TF 的作用就是实时记录并计算这些坐标系之间的位置(平移)和姿态(旋转)关系,让你能轻松把一个坐标系下的点,转换成另一个坐标系下的点。坐标系(Frame):每个部件的坐标参考系,比如base_link(底盘坐标系)、laser_l
ROS包含大量搭建机器人所需要的软件和工具,是目前应用最为广泛的机器人操作系统话题Topic:基于发布-订阅模式,运行节点之间单向、异步交换数据,发布者只发不接收,订阅者只收不回应,适合高频、实时、无反馈要求的数据流传输服务Service双向同步通信方式,客户端发送请求,服务端处理并返回响应。适合低频、有明确结果要求的一次性操作参数Parameter:用于机器人参数的设置、读取与动态修改,是 RO
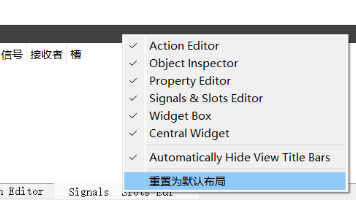
先在.h头文件声明信号,声明槽(红杠处为添加部分)在.cpp文件中实现槽函数QDebug是Qt中用于输出调试信息的类,提供了一种方便的方式来输出文本到标准输出,返回一个QDebug对象,使用流操作符<<输出各种数据类型,与cout使用类似需在.h中引入<QDebug>头文件在.cpp的构造函数中连接信号与槽(connect前面可以声明QObject也可以不写,因为Widget是QObject的派生
哇,今天终于能访问豆瓣了,前几天爬太多次了,网页都不让我访问了(要登录)。