- @zjh2883
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
注意:base_url修改为cc-switch的路由服务器地址。
在blender-4.2.4-linux-x64文件夹下打开命令终端,将blender.desktop复制移动到目录/usr/share/applications/目录下。在blender-4.2.4-linux-x64文件夹下,blender程序是启动脚本,blender.desktop是创建桌面脚本,blender.svg是桌面图标。这里选择Linux 64位的Blender 4.2.4 LT
本文介绍了Facebook开发的Hydra机器学习框架及其核心功能。重点解析了@hydra.main装饰器的用法和参数配置,包括版本检查禁用、配置路径设置等。详细说明了如何通过hydra.core.hydra_config.HydraConfig.get()获取运行时唯一输出目录路径,用于存储实验日志和模型文件。文章还提供了YAML配置示例和代码片段,展示了Hydra在管理机器学习实验参数和日志方
本文介绍了Facebook开发的Hydra机器学习框架及其核心功能。重点解析了@hydra.main装饰器的用法和参数配置,包括版本检查禁用、配置路径设置等。详细说明了如何通过hydra.core.hydra_config.HydraConfig.get()获取运行时唯一输出目录路径,用于存储实验日志和模型文件。文章还提供了YAML配置示例和代码片段,展示了Hydra在管理机器学习实验参数和日志方
输出:Tsim表示每个采样时间点,q、qd表示各关节角度、角速度。设定关节角度、角速度的初值,并确定力矩函数中所含的参数。输入:T表示整个时间间隔,torqfun表示力矩函数。正动力学函数,根据力矩求解关节值。求解科氏力和向心力的耦合矩阵。根据关节值求解所需力矩。求解关节空间惯性矩阵。
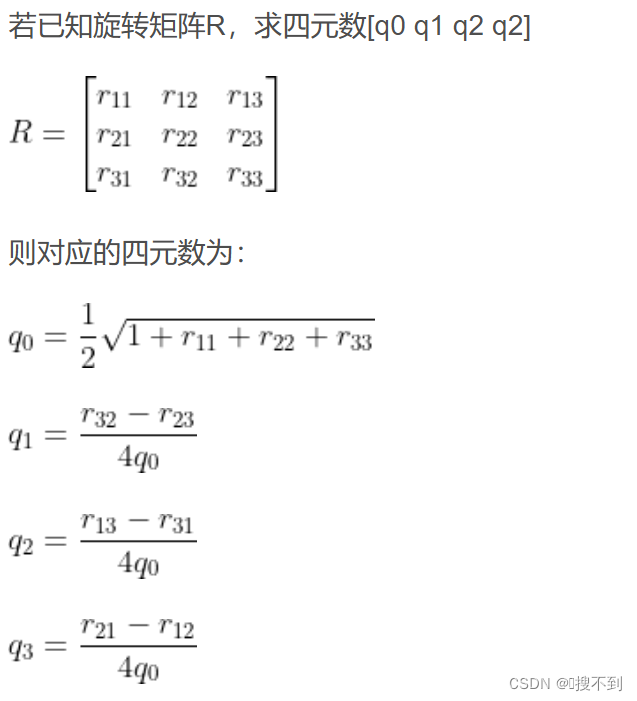
【代码】matlab中旋转矩阵函数。
dpkg命令是用于査询、安装、删除包的基本工具之一。其中dpkg -L是dpkg命令的一个选项,用于列出已安装软件包的所有文件。上述apt-get命令是安装ROS Noetic的包,则此时默认安装包的位置是在/opt/ros/noetic/目录下。在终端中输入dpkg -L<软件包名>,就可以显示出指定软件包所安装的所有文件及其路径信息。在linux系统中,上述apt-get命令默认安装包的位置是
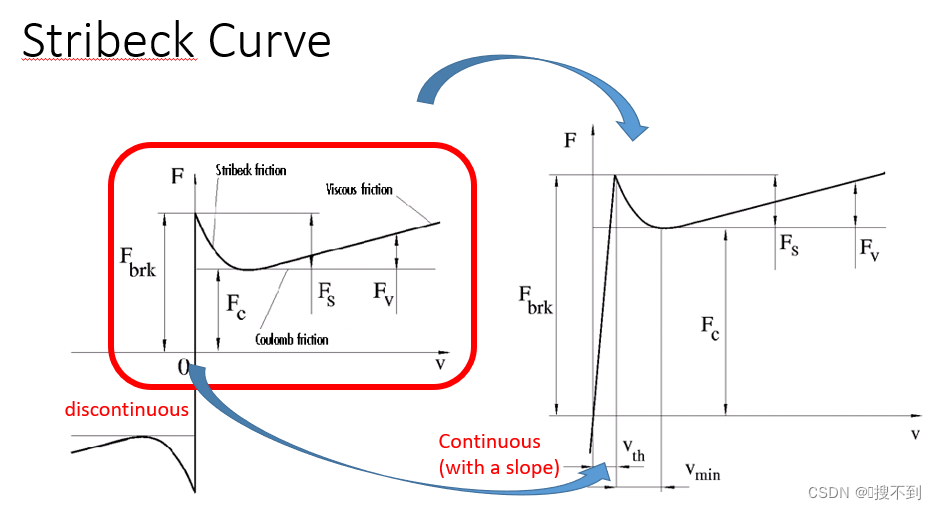
【代码】LuGre摩擦模型详解。
线性二次调节(Linear Quadratic Regulator,LQR)是一种经典的控制理论方法,用于设计控制器,使得线性系统在给定的性能指标下表现最优。LQR的原理基于最小二乘优化问题,它的目标是设计一个状态反馈控制器,以最小化系统的性能指标。
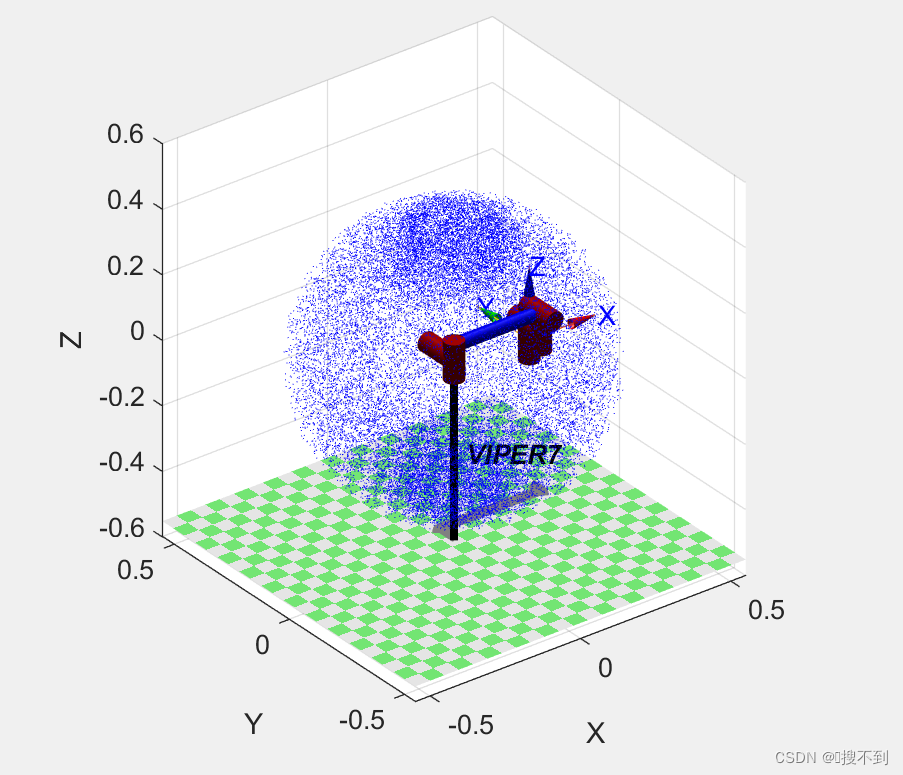
【代码】Matlab 机器人工具箱 例程:运动学+动力学+路径规划+可视化。